一种基于区域提取的交通图像标定方法及装置与流程
本发明涉及道路交通领域,具体涉及一种基于区域提取的交通图像标定方法及装置。
背景技术:
1、随着汽车保有量的增加,道路上的车辆越来越多;在道路上的拍摄相机安装之后,因相机实际坐标系和世界坐标系存在转换关系,对相机的坐标系进行转换进而进行标定,方便雷达和相机(雷视融合场景)或多个不同方向的相机在同一坐标系下进行融合。现有的标定方法基于关键点检测的交通监控相机标定,是监控相机非接触式内部参数自动校准方法,通过检测交通场景下的天然标定物——车牌角点作为标准图案标定相机,结合使用不同的外参标定法,实现相机的完全标定。
2、但是上述方法需要人工操作选取多个车牌角点,进而得到相机的真实外参参数,计算结果依赖于车辆车牌角点位置,如果两个车辆的车牌有移动且车牌面积较大,则会导致计算结果存在误差的现象,无法保证计算结果的准确性。
技术实现思路
1、有鉴于此,本发明实施例提供了一种基于区域提取的交通图像标定方法及装置,解决了由于现有方法计算结果存在误差,无法保证计算结果的准确性的问题。
2、根据第一方面,本发明实施例提供了一种基于区域提取的交通图像标定方法,包括:
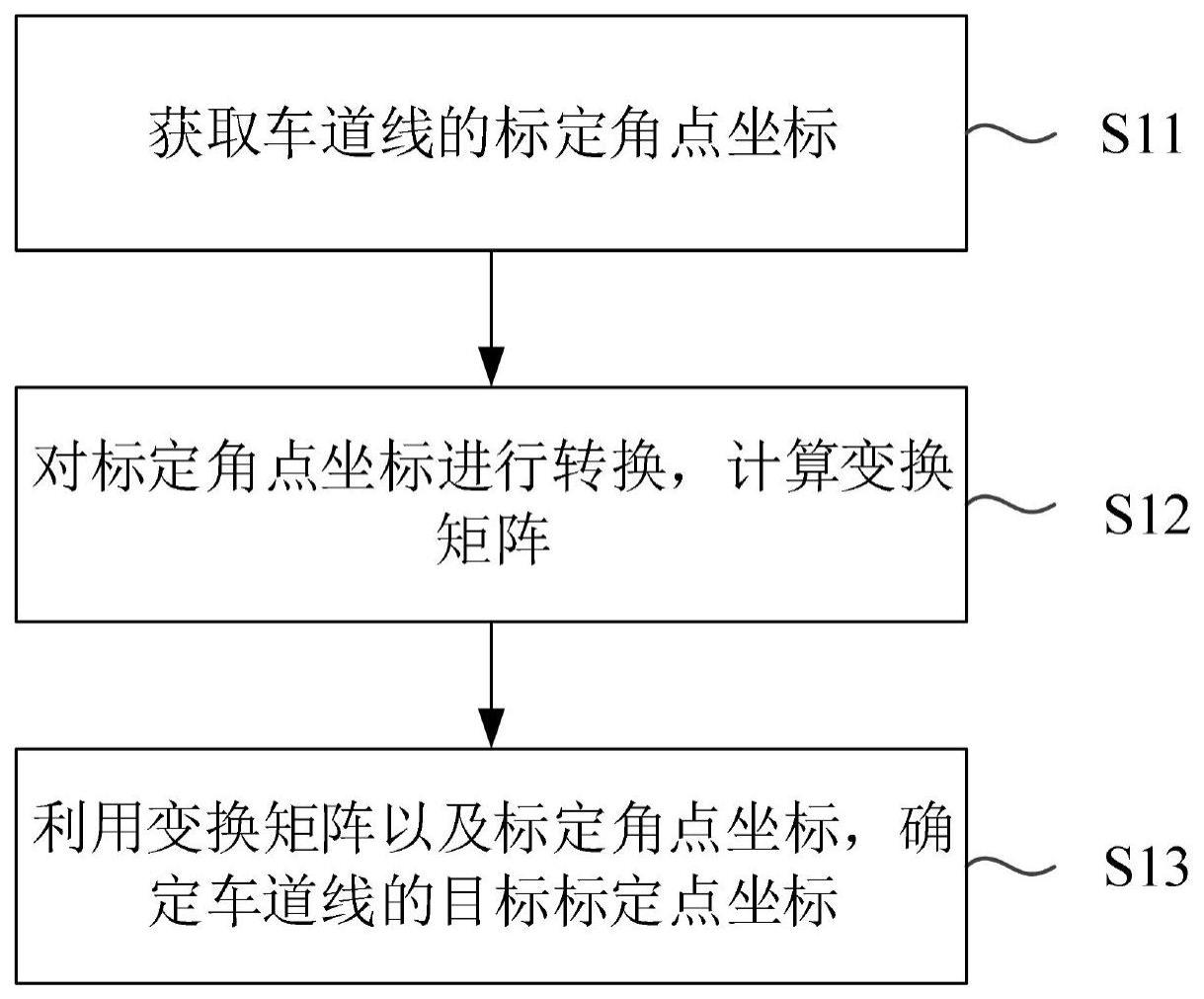
3、获取车道线的标定角点坐标;
4、对所述标定角点坐标进行转换,计算变换矩阵;
5、利用所述变换矩阵以及所述标定角点坐标,确定所述车道线的目标标定点坐标。
6、本发明实施例提供的基于区域提取的交通图像标定方法,提高了安装标定的精度:通过多个角点(包括多个相机重叠角点)的选取以及对高精地图截图方式,大大提高了精度以及减少了计算和人工标定工作量。坐标通过高精地图取均分点,减少了人工标定值,增加了计算理论值,使精度更高;将高精地图转换为像素坐标方式,保证精度同时方便快捷且有效;并且通用性强,适用于普通场景(车载)相机的外参标定,还适用于单路口和多路口的多相机标定。
7、结合第一方面,在第一方面第一实施方式中,所述获取车道线的标定角点坐标,包括:
8、获取拍摄相机坐标;
9、将所述拍摄相机的预设距离处坐标确定为坐标系原点;
10、根据所述坐标系原点确定检测框,并计算出所述坐标系原点的中心像素坐标;
11、利用所述中心像素坐标以及所述检测框,确定标定角点坐标。
12、结合第一方面第一实施方式,在第一方面第二实施方式中,所述利用所述中心像素坐标以及所述检测框,确定标定角点坐标,包括:
13、利用所述中心像素坐标以及所述检测框,确定标定角点像素坐标;
14、将各个所述标定角点像素坐标分别进行透视变换,计算所述标定角点坐标。
15、结合第一方面第二实施方式,在第一方面第三实施方式中,通过以下公式计算所述标定角点坐标:
16、x h11 h12 h13 x h11 h12 h13
17、[y]=[h21 h22 h23][y],其中h13=[h21 h22 h23]
18、1 h31 h32 1 1 h31 h32 1
19、其中,x表示目标检测框的像素中心横坐标,[y]表示目标检测框的像素中心纵坐标,h表示单映射转换矩阵。
20、结合第一方面,在第一方面第四实施方式中,所述对所述标定角点坐标进行转换,计算变换矩阵,包括:
21、通过所述标定角点坐标以及预设规则,对所述标定角点进行过滤,确定目标标定角点;
22、计算各个所述目标标定角点之间的单映射变换矩阵,以及对应的平面坐标;
23、利用ransac算法确定所述单映射变换矩阵对应的目标平面坐标;
24、根据所述平面坐标以及所述目标平面坐标,确定变换矩阵。
25、结合第一方面第四实施方式,在第一方面第五实施方式中,所述利用所述变换矩阵以及所述标定角点坐标,确定所述车道线的目标标定点坐标,包括:
26、利用所述变换矩阵对各个所述标定角点坐标以及所述目标标定角点进行转换;
27、根据转换结果确定所述车道线的目标标定点坐标。
28、本发明实施例提供的基于区域提取的交通图像标定方法,提高了安装标定的精度:通过多个角点(包括多个相机重叠角点)的选取以及对高精地图截图方式,大大提高了精度以及减少了计算和人工标定工作量。坐标通过高精地图取均分点,减少了人工标定值,增加了计算理论值,使精度更高;将高精地图转换为像素坐标方式,保证精度同时方便快捷且有效;并且通用性强,适用于普通场景(车载)相机的外参标定,还适用于单路口和多路口的多相机标定。
29、根据第二方面,本发明实施例提供的基于区域提取的交通图像标定装置,包括:
30、第一处理模块,用于获取车道线的标定角点坐标;
31、第二处理模块,用于对所述标定角点坐标进行转换,计算变换矩阵;
32、第三处理模块,用于利用所述变换矩阵以及所述标定角点坐标,确定所述车道线的目标标定点坐标。
33、本实施例提供的基于区域提取的交通图像标定装置,提高了安装标定的精度:通过多个角点(包括多个相机重叠角点)的选取以及对高精地图截图方式,大大提高了精度以及减少了计算和人工标定工作量。坐标通过高精地图取均分点,减少了人工标定值,增加了计算理论值,使精度更高;将高精地图转换为像素坐标方式,保证精度同时方便快捷且有效;并且通用性强,适用于普通场景(车载)相机的外参标定,还适用于单路口和多路口的多相机标定。
34、根据第三方面,本发明实施例提供了一种电子设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面或者第一方面的任意一种实施方式中所述的基于区域提取的交通图像标定方法。
35、根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行第一方面或者第一方面的任意一种实施方式中所述的基于区域提取的交通图像标定方法。
技术特征:
1.一种基于区域提取的交通图像标定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取车道线的标定角点坐标,包括:
3.根据权利要求2所述的方法,其特征在于,所述利用所述中心像素坐标以及所述检测框,确定标定角点坐标,包括:
4.根据权利要求3所述的方法,其特征在于,通过以下公式计算所述标定角点坐标:
5.根据权利要求1所述的方法,其特征在于,所述对所述标定角点坐标进行转换,计算变换矩阵,包括:
6.根据权利要求5所述的方法,其特征在于,所述利用所述变换矩阵以及所述标定角点坐标,确定所述车道线的目标标定点坐标,包括:
7.一种基于区域提取的交通图像标定装置,其特征在于,包括:
8.一种电子设备,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使计算机执行权利要求1-6中任一项所述的基于区域提取的交通图像标定方法。
技术总结
本发明公开一种基于区域提取的交通图像标定方法及装置,方法包括:获取车道线的标定角点坐标;对标定角点坐标进行转换,计算变换矩阵;利用变换矩阵以及标定角点坐标,确定车道线的目标标定点坐标。本发明提高了安装标定的精度:通过多个角点的选取以及对高精地图截图方式,大大提高了精度以及减少了计算和人工标定工作量。坐标通过高精地图取均分点,减少了人工标定值,增加了计算理论值,使精度更高;将高精地图转换为像素坐标方式,保证精度同时方便快捷且有效;并且通用性强,适用于普通场景相机的外参标定,还适用于单路口和多路口的多相机标定。
技术研发人员:王凤菊,冯际彬
受保护的技术使用者:爱泊车科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!