一种多类传感器数据融合方法、装置及电子设备与流程
本说明书一个或多个实施例涉及传感器数据处理技术,尤其涉及一种多类传感器数据融合方法、装置及电子设备。
背景技术:
1、随着科学技术和各种传感器技术的飞速发展,各种集成类的电子系统在监控防护领域得到广泛应用。由于安防区域的外界探测环境因素复杂多变,单传感器的探测范围与功能存在局限性和不确定性,只能得到识别目标某一方面的特征信息。因此,目前需要综合利用多种异构传感器的特点,多方位多角度的获取目标对象的多种特征信息,以提高采集到的系统数据在各维度上的覆盖范围。然而,多传感器协同工作不是简单的对多类传感器所采集的信息进行叠加处理,需要利用多个传感器数据的冗余性和互补性,实现数据资源的深度融合,以提高对目标对象的检测和识别能力。
2、由于传感器侦测目标对象容易受到环境和测量角度的影响,多传感器数据融合会受到测量周期不同步、数据率及测量属性维数不一致等因素干扰。因此,目前大部分数据融合方法会直接强制处理传感器产生的噪声数据和缺失值,无法实时调整传感器的融合权值,导致最终的融合数据的准确性和实时性较差。
技术实现思路
1、为了解决上述问题,本说明书一个或多个实施例描述了一种多类传感器数据融合方法、装置及电子设备。
2、根据第一方面,提供了一种多类传感器数据融合方法,包括:
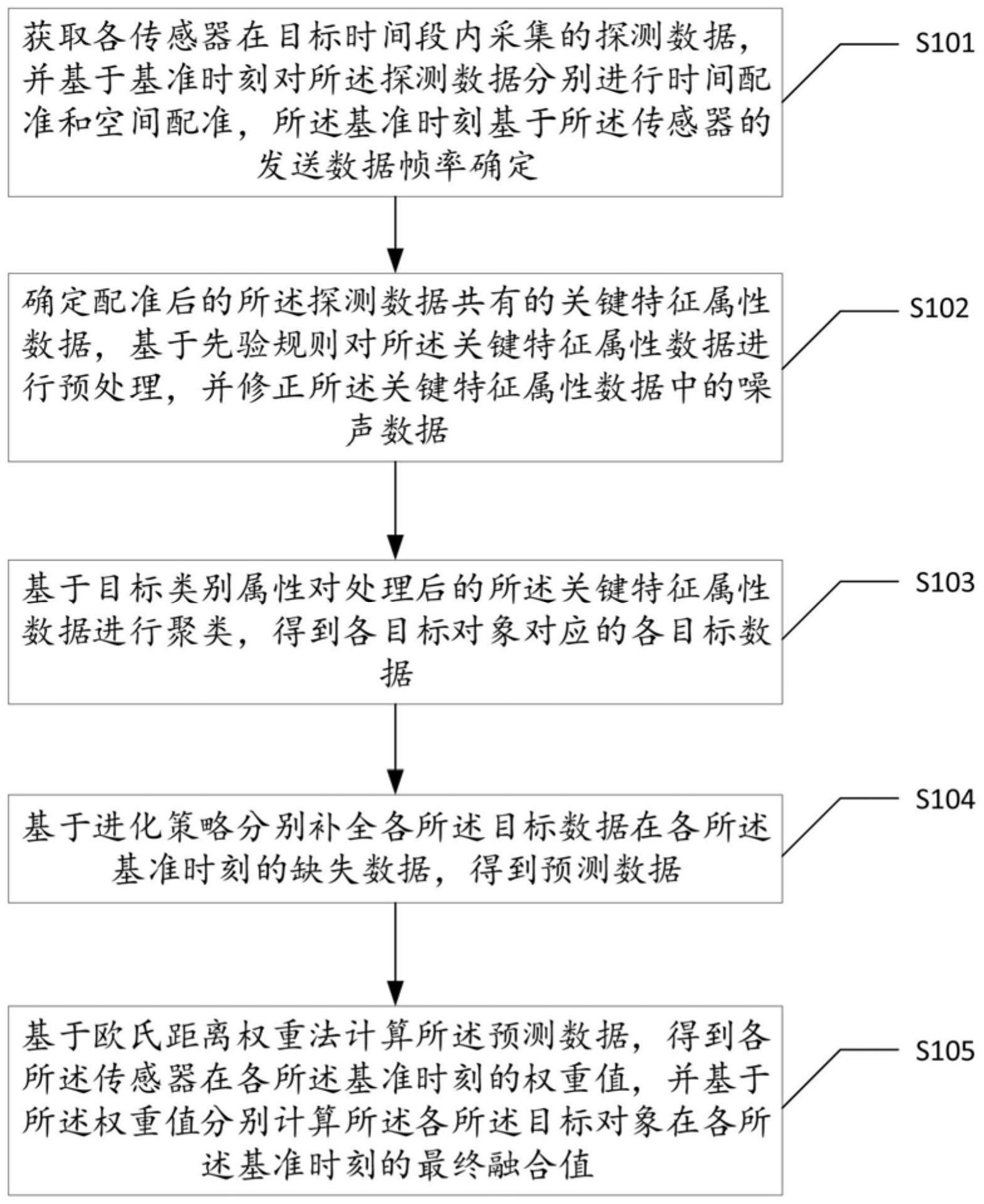
3、获取各传感器在目标时间段内采集的探测数据,并基于基准时刻对所述探测数据分别进行时间配准和空间配准,所述基准时刻基于所述传感器的发送数据帧率确定;
4、确定配准后的所述探测数据共有的关键特征属性数据,基于先验规则对所述关键特征属性数据进行预处理,并修正所述关键特征属性数据中的噪声数据;
5、基于目标类别属性对处理后的所述关键特征属性数据进行聚类,得到各目标对象对应的各目标数据;
6、基于进化策略分别补全各所述目标数据在各所述基准时刻的缺失数据,得到预测数据;
7、基于欧氏距离权重法计算所述预测数据,得到各所述传感器在各所述基准时刻的权重值,并基于所述权重值分别计算所述各所述目标对象在各所述基准时刻的最终融合值。
8、优选的,所述基于基准时刻对所述探测数据分别进行时间配准和空间配准,包括:
9、确定发送数据帧率最小的第一传感器,基于所述第一传感器的数据发送周期确定基准时刻;
10、分别确定第二传感器的各第二探测数据最接近的各相邻基准时刻,基于所述相邻基准时刻对各所述第二探测数据的时间数据进行分段线性插值,得到时间配准数据,所述第二传感器为除所述第一传感器外的传感器;
11、对所述探测数据进行空间配准。
12、优选的,所述对所述探测数据进行空间配准,包括:
13、以地心惯性坐标系作为基准参考系,将所述传感器的大地坐标系数据转换为地心坐标系数据,并基于所述地心坐标系数据转换所述探测数据的空间数据,得到空间配准数据。
14、优选的,所述基于先验规则对所述关键特征属性数据进行预处理,包括:
15、对所述关键特征属性数据的度量衡进行同类换算;
16、校准各所述传感器的校时系统的时差;
17、将同时位置属性不一致的所述探测数据标记为不同所述目标对象;
18、将相同位置属性且速度属性不一致的所述探测数据标记为不同所述目标对象;
19、将相同目标id的所述探测数据标记为相同所述目标对象。
20、优选的,所述修正所述关键特征属性数据中的噪声数据,包括:
21、针对任一所述传感器的第一关键特征属性数据,计算各所述基准时刻下的所述第一关键特征属性数据的第一平均值和标准差;
22、将与所述第一平均值之差的绝对值大于三倍所述标准差的所述第一关键特征属性数据标记为噪声数据,并基于其余所述传感器在同一时刻对应的各第二关键特征属性数据的第二平均值修正所述噪声数据。
23、优选的,所述基于进化策略分别补全各所述目标数据在各所述基准时刻的缺失数据,得到预测数据,包括:
24、确定需要补全所述缺失数据的待补全目标数据;
25、针对任一所述基准时刻,基于所述待补全目标数据随机生成第一预设数量的初始数组,所述初始数组的元素个数等于所述待补全目标数据在下一所述基准时刻的数组缺失数目;
26、基于预设的适应度函数分别求解各所述初始数组,确定适应度函数值最小的当代个体最优解数组;
27、对所述当代个体最优解数组进行正负偏离,生成下一代种群的所述初始数据,并重复所述基于预设的适应度函数分别求解各所述初始数组,确定适应度函数值最小的当代个体最优解数组的步骤,直至满足迭代结束条件;
28、将全局的适应度函数值最小的目标数组作为针对缺失数据的补全数据,并重复所述针对任一所述基准时刻,基于所述待补全目标数据随机生成第一预设数量的初始数组的步骤,直至所有所述待补全目标数据的所有所述基准时刻的所述缺失数据均被补全。
29、优选的,所述基于所述权重值分别计算所述各所述目标对象在各所述基准时刻的最终融合值,包括:
30、分别获取各所述目标对象在所述基准时刻未补全的非关键特征属性数据和补全后数组元素小于传感器总数的第三关键特征属性数据,生成第一计算数组;
31、计算所述第一计算数组的第三平均值,并基于所述权重值计算第四关键特征属性数据的第一融合值,所述第四关键特征属性数据为补全后数组元素等于传感器总数的关键特征属性数据;
32、基于所述第三平均值与第一融合值之和确定各所述目标对象在各所述基准时刻的最终融合值。
33、根据第二方面,提供了一种多类传感器数据融合装置,所述装置包括:
34、获取模块,用于获取各传感器在目标时间段内采集的探测数据,并基于基准时刻对所述探测数据分别进行时间配准和空间配准,所述基准时刻基于所述传感器的发送数据帧率确定;
35、修正模块,用于确定配准后的所述探测数据共有的关键特征属性数据,基于先验规则对所述关键特征属性数据进行预处理,并修正所述关键特征属性数据中的噪声数据;
36、聚类模块,用于基于目标类别属性对处理后的所述关键特征属性数据进行聚类,得到各目标对象对应的各目标数据;
37、补全模块,用于基于进化策略分别补全各所述目标数据在各所述基准时刻的缺失数据,得到预测数据;
38、计算模块,用于基于欧氏距离权重法计算所述预测数据,得到各所述传感器在各所述基准时刻的权重值,并基于所述权重值分别计算所述各所述目标对象在各所述基准时刻的最终融合值。
39、根据第三方面,提供了一种电子设备,包括处理器以及存储器;
40、所述处理器与所述存储器相连;
41、所述存储器,用于存储可执行程序代码;
42、所述处理器通过读取所述存储器中存储的可执行程序代码来运行与所述可执行程序代码对应的程序,以用于执行如第一方面或第一方面的任意一种可能的实现方式提供的方法的步骤。
43、根据第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机可读存储介质中存储有指令,当所述指令在计算机或处理器上运行时,使得所述计算机或处理器执行如第一方面或第一方面的任意一种可能的实现方式提供的方法。
44、本说明书实施例提供的方法及装置,能够实现:1、通过时间配准设置精细的融合周期充分利用互补和冗余的数据属性提升数据融合的抗干扰能力。
45、2、通过进化策略的动态自适应和容错性特点不断优化和修正数据融合的精度。
46、3、通过欧式距离权重法灵活求解每个基准时刻的权重增加数据融合的可靠性,最终的融合数据的准确性和实时性较好。
- 还没有人留言评论。精彩留言会获得点赞!