一种基于Laplace方程的边坡滑动面降维搜索方法
本发明属于岩土工程边坡,具体涉及一种基于laplace方程的边坡滑动面降维搜索方法。
背景技术:
1、边坡稳定分析的一个核心任务就是危险滑动面的搜索。各种数学优化方法及进化算法在危险滑弧搜索中各显神通。但无论何种优化算法,其效率严重依赖于优化问题的维度,其计算的时间复杂度随问题维度的增加呈非线性急剧增长。二维问题中,当假定滑动面为圆弧时,其优化维度为3;而当滑动面为非圆弧时,其维度上升至数十或数百不等。
2、极限平衡条分法(lem)是进行边坡分析最常用的方法。duncan总结了一些经典的极限平衡分析方法的特点(duncan j m.state of the art:limit equilibrium andfinite-element analysis of slopes[j].journal of geotechnical engineering,1996,122(7):577-596.),包括瑞典条分法、毕肖普条分法、不平衡推力法、简布条分法、摩根斯坦和普赖斯方法及斯宾塞方法等。由于条分所得的平衡方程组非静定,为了得到方程的解(滑动面上的应力),上述所有方法无一例外地采用了各种各样的条间力假定。基于简化毕肖普法的复合地基填方边坡稳定性评价方法(cn202011497841.x),针对正方形布置的桩加固的边坡,通过将滑体划分为包含桩和不包含桩的若干块,单独计算各条块的面积与重力,基于简化毕肖普法计算复合地基填方边坡稳定性系数。实际上,上述各方法本质的差别就在于条间力的假定不同。条间力假定成为极限条分法的最大特点的同时也成为其最大的缺点,因为假定导致导致滑动面上的应力解不准确,从而影响边坡安全状态的判断。
技术实现思路
1、危险滑动面的搜索是边坡稳定分析的一个核心任务,现有的各种优化方搜索算法的效率严重依赖于优化问题的维度,其计算的时间复杂度随问题维度的增加呈非线性急剧增长,严重影响搜索的效率。本发明目的是给出一种高效的方法对边坡稳定问题进行降维优化分析:坡体内部滑动面的位置及走向由laplace方程进行数值求解确定,利用流线实现降维。因为当求解条件一定时,通过空间中任一点的流线是唯一的。
2、本发明至少通过如下技术方案之一实现。
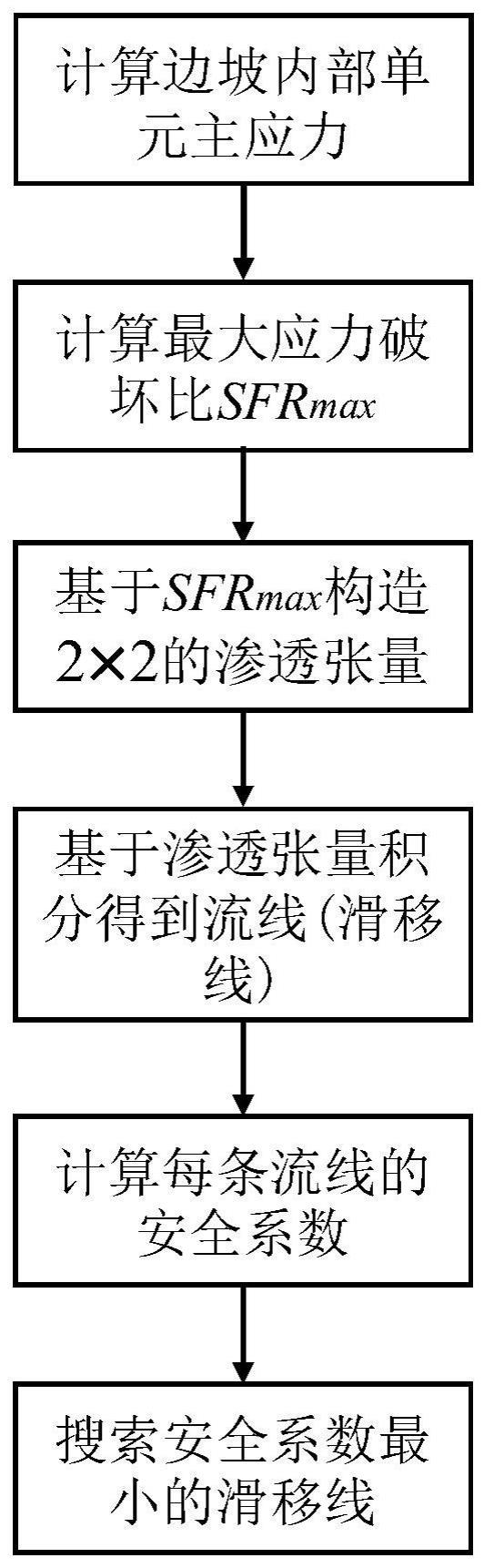
3、一种基于laplace方程的边坡滑动面降维搜索方法,包括以下步骤:
4、第一步、选用laplace方程作为边坡内部滑动面引导势场的控制方程;
5、第二步、基于弹性应力场及莫尔库伦破坏准则,构造用于表示材料中某一点局部稳定性的量:最大应力破坏比;
6、第三步、根据最大应力破坏比的大小和方向确定能反映边坡应力破坏状态的渗透张量;
7、第四步、利用有限元求解laplace方程,得到边坡内部滑动面引导势场,并根据该场,构建一簇合理的滑动面;
8、第五步、对应每一滑动面,根据其滑动面上的应力状态,计算其安全系数,并得出安全系数最小的危险滑动面。
9、进一步地,构造最大应力破坏比的具体过程为:
10、应力破坏比定义为:
11、
12、式中:sfr(θ)为θ处应力破坏比,τ为滑动面上剪应力,τf为滑动面上土体抗剪强度,θ为sfr平面相对于大主应力作用面夹角与最大主应力面夹角的两倍,并且主应力作用于某点处,令
13、
14、式中:σ′c与σ′q均为中间变量,σ′1为莫尔圆中正应力最大值,σ′3为莫尔圆中正应力最小值;有
15、
16、式中:c为边坡土体粘聚力,为边坡土体内摩擦角,a、b均为中间变量;
17、式(3)存在最大值,对其进行求导并令dsfr/dθ=0,得到sfr(θ)的最大值即最大应力破坏比sfrmax及其方向,其中sfrmax平面相对于大主应力作用面夹角:
18、
19、进一步地,对于一个给定的点,有两个失效平面,边坡的滑动方向指向被激活的平面,考虑到坡度滑动方向,最大应力破坏比sfrmax平面相对于x轴的角度为:
20、
21、式中:βmax为sfrmax平面相对于x轴的角度,α为主应力作用面与x轴方向的夹角,θmax为sfrmax平面相对于大主应力作用面夹角,σ′x与σ′y分别为土体单元水平与竖向应力值,sd为调整滑动方向的参数。
22、进一步地,确定能反映边坡应力破坏状态的渗透张量的具体过程为:
23、定义渗透张量的主轴相对于x轴的角度设定为βmax;
24、对于所有材料点,假定有一个恒定的各向异性比率rk=kmax/kmin,其中kmax为单元体内渗透系数最大值,kmin为单元体内渗透系数最小值,各向异性的作用是使流线在应力破坏比sfr(θ)的最大值sfrmax的方向流动;
25、材料中每一点的渗透率都有一个缩放系数κ,缩放系数是根据每个积分点的sfrmax缩放渗透率,使更多的流线在sfrmax的区域内流动,增加找到临界滑动面的机会:
26、
27、式中:kg为引导势场的控制方程的渗透张量,κ为缩放因子,r为旋转张量,kl为原始渗透张量,kmin为单元体内渗透系数最小值,rk为恒定的各向异性比率;sfrk0是弹性状态下的应力破坏比,kb是背景流因子,所有积分点的(sfrmax-sfrk0)的最大值为msfr,p是调整尺度的权重;βmax为sfrmax平面相对于x轴的角度。
28、进一步地,渗透张量和sfrmax的最大主方向完全一致,形状相似。sfr(θ)不能用对称的二阶张量表示,但k可以。不可能得到一个与sfr相同的k。
29、进一步地,当多层边坡存在薄弱土层时,薄弱土层的渗透率将根据其厚度增加10-1000倍,以保证更多流线穿过它。
30、进一步地,对于其中涉及的边界敏感性问题,通过加强渗透张量的各向异性来抑制边界的敏感性。
31、进一步地,:当有地下水作用时,需要同时施加真实的渗流场。
32、进一步地,根据边界条件生成一个虚拟的渗流场,有两种方法:一是指定入口和出口区域,并在其上应用恒定水头;二是根据地面高程在所有地面上应用一个线性变化的水头。
33、进一步地,在流线整合过程中,如果整合点的渗流速度水平分量vx,与坡面滑动方向相反,或者调动的剪应力与坡面运动方向相反,则修改为平行于被动破坏面方向的速度方向v,对于右滑坡,等于对于左滑坡,等于为土体内摩擦角。
34、与现有技术相比,本发明的有益效果为:
35、通过解决各向异性的laplace方程,将纯优化问题转化为边界值问题,减少了优化维度。这种方法将二维边坡稳定性优化问题转换为一维问题,大大提高了临界滑移线搜索的效率。该方法是基于有限元弹性应力场和封闭的虚拟渗流场,既不需要进行迭代工作,也不需要对滑移线形状以及条间力进行假设。
技术特征:
1.一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:构造最大应力破坏比的具体过程为:
3.根据权利要求2所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:对于一个给定的点,有两个失效平面,边坡的滑动方向指向被激活的平面,考虑到坡度滑动方向,最大应力破坏比sfrmax平面相对于x轴的角度为:
4.根据权利要求1所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:确定能反映边坡应力破坏状态的渗透张量的具体过程为:
5.根据权利要求4所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:渗透张量和sfrmax的最大主方向完全一致,形状相似。sfr(θ)不能用对称的二阶张量表示,但k可以。不可能得到一个与sfr相同的k。
6.根据权利要求4所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:当多层边坡存在薄弱土层时,薄弱土层的渗透率将根据其厚度增加10-1000倍,以保证更多流线穿过它。
7.根据权利要求4所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:对于其中涉及的边界敏感性问题,通过加强渗透张量的各向异性来抑制边界的敏感性。
8.根据权利要求4所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:当有地下水作用时,需要同时施加真实的渗流场。
9.根据权利要求8所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:根据边界条件生成一个虚拟的渗流场,有两种方法:一是指定入口和出口区域,并在其上应用恒定水头;二是根据地面高程在所有地面上应用一个线性变化的水头。
10.根据权利要求1所述的一种基于laplace方程的边坡滑动面降维搜索方法,其特征在于:在流线整合过程中,如果整合点的渗流速度水平分量vx,与坡面滑动方向相反,或者调动的剪应力与坡面运动方向相反,则修改为平行于被动破坏面方向的速度方向v,对于右滑坡,等于对于左滑坡,等于为土体内摩擦角。
技术总结
本发明公开了一种基于Laplace方程的边坡滑动面降维搜索方法,包括以下步骤:根据应力内含的渗流张量和Laplace方程求解一个渗流速度场;依据速度场积分流线;根据流线上的应力状态,计算每一流线上安全系数,安全系数最小的流线即为危险滑动面,通过解决各向异性的Laplace方程,将纯优化问题转化为边界值问题,将二维边坡稳定性优化问题转换为一维问题,提高临界滑移线搜索的效率,本发明是基于有限元弹性应力场和封闭的虚拟渗流场,既不需要进行迭代工作,也不需要对滑移线形状以及条间力进行假设,能够降维优化,极大的减少搜索危险滑弧得工作量;摒弃滑动面形状假定并且基于有限元弹性应力场,摒弃条间力假定。
技术研发人员:骆冠勇,杨飞,潘泓,曹洪
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!