大幅遥感影像的地物识别方法、装置、设备及存储介质与流程
本发明涉及图像处理,尤其涉及一种大幅遥感影像的地物识别方法、装置、设备及存储介质。
背景技术:
1、在大面积的遥感影像中提取特定地物是遥感影像分析中的主要任务。为了解决现有方案中直接将大幅遥感影像输入到网络模型中会造成显存溢出的问题,目前所采用的技术方案为将大幅遥感影像裁剪为一系列较小的图像再输入网络进行预测,然后将预测结果按照裁剪顺序拼接成一张最终结果图像,但是这种处理当时会使裁剪边缘处的物体容易被切分开。或者是采用重叠的方式进行裁剪和预测,然后在全局对实例分割掩膜的外接矩形两两之间计算重叠率,超过一定的阈值就将他们合并成一个物体,但是这种方案只能适用于呈水平方向排列的物体,对非水平排列的物体处理效果不佳。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种大幅遥感影像的地物识别方法、装置、设备及存储介质,旨在解决现有技术对无法适应对非水平排列物体的遥感影像预测的技术问题。
2、为实现上述目的,本发明提供了一种大幅遥感影像的地物识别方法,所述方法包括以下步骤:
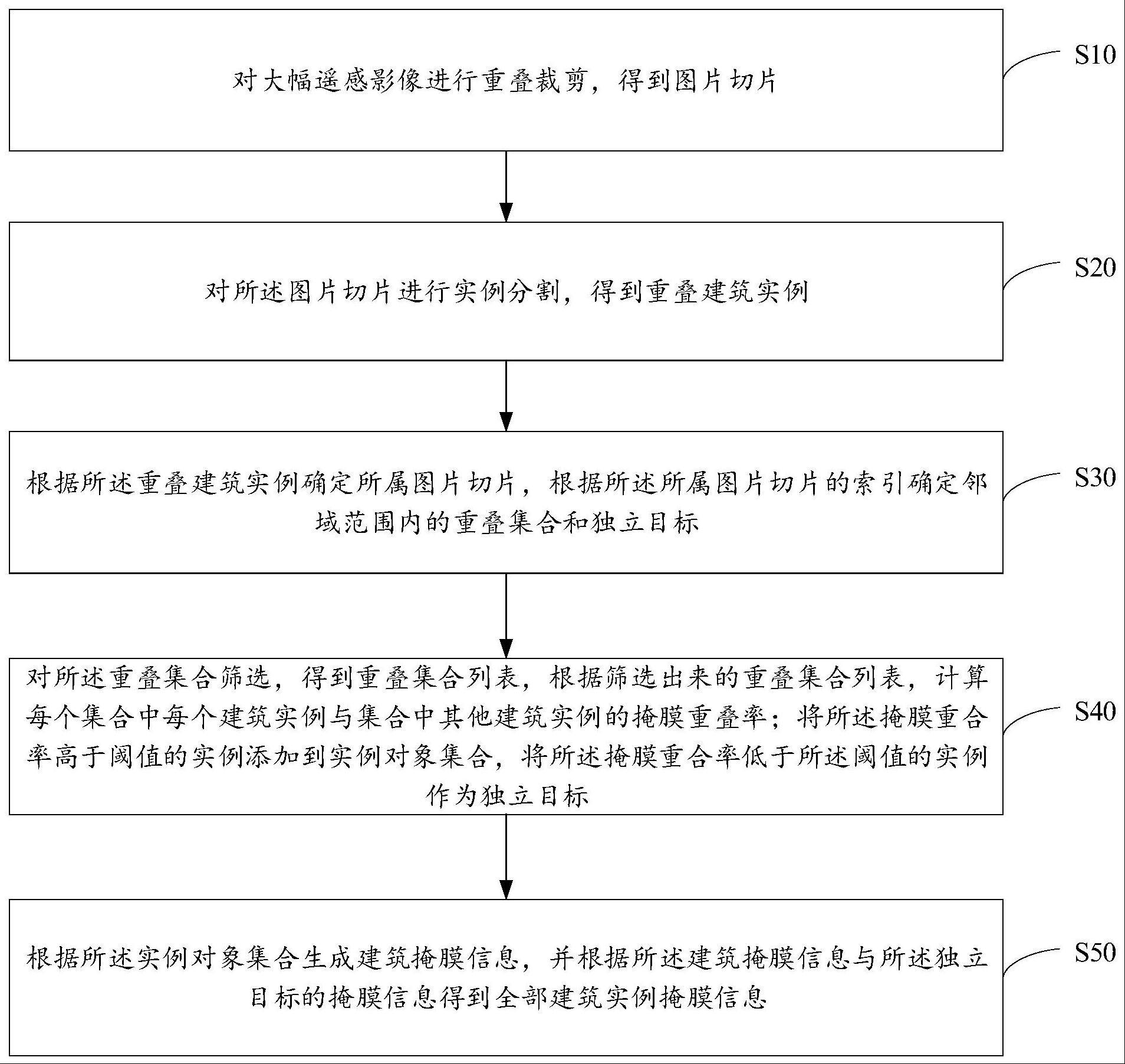
3、对大幅遥感影像进行重叠裁剪,得到图片切片;
4、对所述图片切片进行实例分割,得到重叠建筑实例;
5、根据所述重叠建筑实例确定所属图片切片,根据所述所属图片切片的索引确定邻域范围内的重叠集合和独立目标;
6、对所述重叠集合筛选,得到重叠集合列表,根据筛选出来的重叠集合列表,计算每个集合中每个建筑实例与集合中其他建筑实例的掩膜重叠率;将所述掩膜重合率高于阈值的实例添加到实例对象集合,将所述掩膜重合率低于所述阈值的实例作为独立目标;
7、根据所述实例对象集合生成建筑掩膜信息,并根据所述建筑掩膜信息与所述独立目标的掩膜信息得到全部建筑实例掩膜信息。
8、可选地,所述对所述图片切片进行实例分割,得到重叠建筑实例,包括:
9、根据所述图片切片得到建筑实例的掩膜和矩形框坐标;
10、为所述建筑实例创建第一掩膜,所述第一掩膜包括相对于所述大幅遥感影像的坐标偏移、矩形框坐标、以及当前图片切片的索引信息,所述第一掩膜的储存大小与所述图片切片的尺寸大小相同;
11、基于所述大幅遥感影像创建第二掩膜,并将所述第一掩膜与所述第二掩膜叠加,得到第三掩膜,并根据所述第三掩膜得到重叠建筑实例,所述第二掩膜和所述第三掩膜的尺寸大小与所述大幅遥感影像的尺寸大小相同。
12、可选地,所述根据所述重叠建筑实例确定所属图片切片,根据所述所属图片切片的索引确定邻域范围内的重叠集合和独立目标,包括:
13、根据所述所属图片切片的索引确定所述所属图片切片的索引的邻域范围内的其他图片切片的索引值;
14、根据所述其他图片切片的索引值确定所述邻域范围内其他的建筑实例;
15、遍历所述建筑实例,得到所述建筑实例的矩形框;
16、对所述建筑实例的矩形框检测,在所述建筑实例的矩形框存在重叠时,将所述建筑实例的索引添加到重叠集合;
17、在所述建筑实例的矩形框无重叠时,将所述建筑实例确定为独立目标。
18、可选地,所述在所述建筑实例的矩形框存在重叠时,将所述建筑实例的索引添加到重叠集合之后,还包括:
19、遍历所述重叠集合,获取所述重叠集合中建筑实例的合并标志位;
20、在所述重叠集合中建筑实例与所述重叠集合中的其他建筑实例存在交集,将所述重叠集合中建筑实例的标记位更新为true;
21、将所述标记位为true的建筑实例进行合并,并对合并后的建筑实例进行检测;
22、在所述合并后的建筑实例与所述重叠集合中的其他建筑实例存在交集,则将所述合并后的建筑实例的标记位更新为true,并执行将所述标记位为true的建筑实例进行合并,并对合并后的建筑实例进行检测的步骤;
23、在所述重叠集合中建筑实例与所述重叠集合中的其他建筑实例不存在交集时,将所述重叠集合中建筑实例添加到结果列表。
24、可选地,所述根据所述所属图片切片的索引确定所述所属图片切片的索引的邻域范围内的其他图片切片的索引值之前,还包括:
25、根据所述大幅遥感影像尺寸与重叠裁剪尺寸得到水平方向的切片个数和垂直方向的切片个数;
26、根据所述水平方向的切片个数和所述垂直方向的切片个数创建矩阵,所述矩阵的行数与列数与所述水平方向的切片个数和所述垂直方向的切片个数一致。
27、可选地,所述据所述所属图片切片的索引确定所述所属图片切片的索引的邻域范围内的其他图片切片的索引值,包括:
28、将所述所属图片切片的索引存储于索引列表中;
29、对所述所属图片切片的索引的上下左右四个方向的索引值的有效性进行判断,将有效索引添加到所述索引列表;
30、对所述所属图片切片的索引的四个角落的索引值的有效性进行判断,将有效索引添加到所述索引列表;
31、根据所述索引列表中记录的索引值得到所述邻域范围内的其他图片切片的索引值。
32、可选地,所述根据所述实例对象集合生成建筑掩膜信息,并根据所述建筑掩膜信息与所述独立目标的掩膜信息得到全部建筑实例掩膜信息,包括:
33、根据建筑掩膜信息以及独立目标的掩膜信息得到与所述大幅遥感影像的坐标偏移;
34、根据所述坐标偏移将所述建筑掩膜信息以及所述独立目标的掩膜信息添加到所述大幅遥感影像,得到全部建筑实例掩膜信息。
35、此外,为实现上述目的,本发明还提出一种大幅遥感影像的地物识别装置,所述大幅遥感影像的地物识别装置包括:
36、图像切片模块,用于对大幅遥感影像进行重叠裁剪,得到图片切片;
37、实例分割模块,用于对所述图片切片进行实例分割,得到重叠建筑实例;
38、切片重叠模块,用于根据所述重叠建筑实例确定所属图片切片,根据所述所属图片切片的索引确定邻域范围内的重叠集合和独立目标;
39、实例筛选模块,用于对所述重叠集合筛选,得到重叠集合列表,根据筛选出来的重叠集合列表,计算每个集合中每个建筑实例与集合中其他建筑实例的掩膜重叠率;将所述掩膜重合率高于阈值的实例添加到实例对象集合,将所述掩膜重合率低于所述阈值的实例作为独立目标;
40、掩膜融合模块,用于根据所述实例对象集合生成建筑掩膜信息,并根据所述建筑掩膜信息与所述独立目标的掩膜信息得到全部建筑实例掩膜信息。
41、此外,为实现上述目的,本发明还提出一种大幅遥感影像的地物识别设备,所述大幅遥感影像的地物识别设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的大幅遥感影像的地物识别程序,所述大幅遥感影像的地物识别程序配置为实现如上文所述的大幅遥感影像的地物识别方法的步骤。
42、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有大幅遥感影像的地物识别程序,所述大幅遥感影像的地物识别程序被处理器执行时实现如上文所述的大幅遥感影像的地物识别方法的步骤。
43、本发明通过对大幅遥感影像进行重叠裁剪得到图片切片,对图片切片实例分割得到重叠建筑实例,根据重叠建筑实例确定所属图片切片,根据所属图片切片的索引确定邻域范围内的重叠集合和独立目标,根据重叠集合中每个建筑实例与重叠集合内的其他建筑实例的重合率,将重合率高于阈值的实例添加到实例对象集合,将重合率低于阈值的实例作为独立目标,根据实例对象集合生成建筑掩膜信息,根据建筑掩膜信息与独立目标的掩膜信息得到全部建筑实例掩膜信息。实现将裁剪边缘处被切割成超过2个部分的原始掩膜合并,还原裁剪边缘处物体的真实掩膜,解决重叠裁剪后物体被切割成多个部分的问题。
- 还没有人留言评论。精彩留言会获得点赞!