一种基于支持向量机的小行星抵近信息融合定轨方法
本发明涉及一种小行星抵近信息融合定轨方法,属于空间。
背景技术:
1、小行星探测是深远空间探测的一种重要的任务形式。由于小行星不受人为因素影响,保留了较多太阳系诞生初期的物理性质,因此小行星被誉为“太阳系远古化石”。通过探测小行星,人们可以探究宇宙的起源、太阳系的物质组成以及寻找生命的起源。小行星探测首先需要对小行星仅抵近,其中轨道确定是小行星探测抵近过程中的核心技术之一,通过抵近轨道确定,探测器可以确定其在惯性系中的位置,进而可以根据小行星的相对位置进行抵近制导与控制。在小行星抵近过程中,通常可以采用光学测角以及雷达测距两种测量方式进行定轨。由于两种测量方式测量机理不同,测量误差量级也就不同。导致在两种测量方式进行融合定轨的时候,容易由于测量误差量级不同导致数值计算奇异,因此通过可以采用均方根信息滤波方法进行定轨。均方根信息滤波方法相比于一般的扩展卡尔曼滤波方法,由于采用均方根矩阵进行定轨计算,可以一定程度避免测量误差量级不同带来的数值奇异问题。然而在测角、测距测量误差量级差距较小的情况下,均方根信息滤波的定轨精度较扩展卡尔曼滤波方法差。为了提高小行星抵近定轨精度,同时避免测角、测距测量误差量级差距较大情况下的计算数值奇异问题,有必要通过训练支持向量机(svm)模型,辨识哪些情况下应该使用扩展卡尔曼滤波算法,哪些情况下应该使用均方根信息滤波算法。
技术实现思路
1、本发明的目的是提供一种基于支持向量机的小行星抵近信息融合定轨方法,通过训练支持向量机模型,辨识在抵近小行星过程中,使用需要切换均方根信息滤波算法进行定轨。本发明具有定轨精度高,估计误差小的优势,有利于减少小行星抵近定轨计算奇异问题,提升小行星抵近过程中探测器感知能力。
2、本发明的目的是通过以下技术方案实现的。
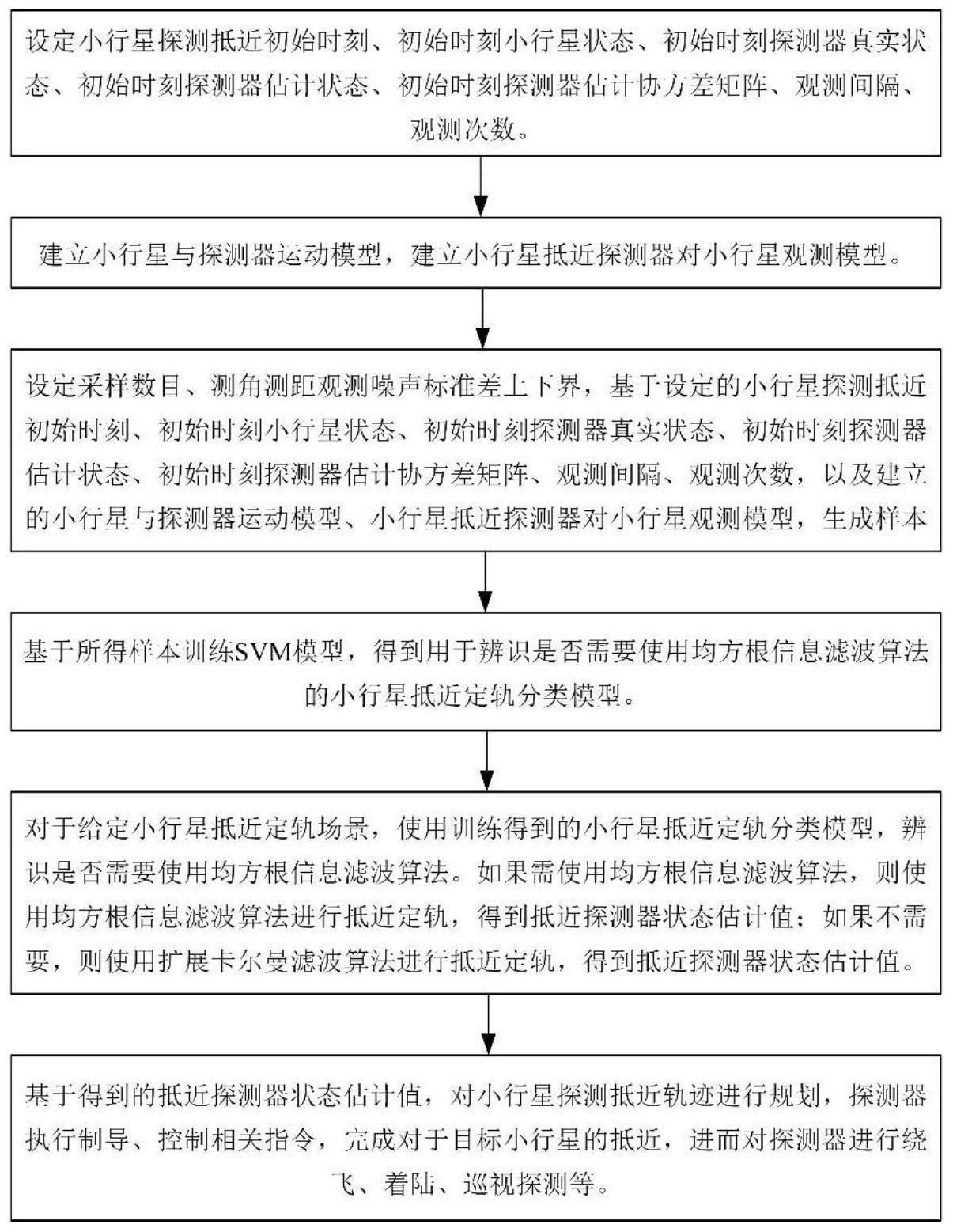
3、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,设定小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数。建立小行星与探测器运动模型,建立小行星抵近探测器对小行星观测模型。设定采样数目、测角测距观测噪声标准差上下界,基于设定的小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数,以及建立的小行星与探测器运动模型、小行星抵近探测器对小行星观测模型,生成样本。基于所得样本训练svm模型,得到用于辨识是否需要使用均方根信息滤波算法的小行星抵近定轨分类模型。对于给定小行星抵近定轨场景,使用训练得到的小行星抵近定轨分类模型,辨识是否需要使用均方根信息滤波算法。如果需要使用均方根信息滤波算法,则使用均方根信息滤波算法进行抵近定轨,得到抵近探测器状态估计值;如果不需要,则使用扩展卡尔曼滤波算法进行抵近定轨,得到抵近探测器状态估计值。基于得到的抵近探测器状态估计值,对小行星探测抵近轨迹进行规划,探测器执行制导、控制相关指令,实现对于目标小行星的抵近,进而对探测器进行绕飞、着陆、巡视探测。
4、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,包括如下步骤:
5、步骤一:设定小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数。
6、设定小行星探测抵近初始时刻t0,设定初始时刻小行星状态为:
7、
8、其中表示小行星在惯性系下x方向位置分量,表示小行星在惯性系下y方向位置分量,表示小行星在惯性系下z方向位置分量,表示小行星在惯性系下x方向速度分量,表示小行星在惯性系下y方向速度分量,表示小行星在惯性系下z方向速度分量。
9、设定初始时刻探测器真实状态为:
10、
11、其中表示探测器在惯性系下x方向真实位置分量,表示探测器在惯性系下y方向真实位置分量,表示探测器在惯性系下z方向真实位置分量,表示探测器在惯性系下x方向真实速度分量,表示探测器在惯性系下y方向真实速度分量,表示探测器在惯性系下z方向真实速度分量。
12、设定初始时刻探测器估计状态为:
13、
14、其中表示探测器在惯性系下x方向估计位置分量,表示探测器在惯性系下y方向估计位置分量,表示探测器在惯性系下z方向估计位置分量,表示探测器在惯性系下x方向估计速度分量,表示探测器在惯性系下y方向估计速度分量,表示探测器在惯性系下z方向估计速度分量。
15、设定初始时刻探测器估计协方差矩阵观测间隔dt、观测次数n。
16、步骤二:根据步骤一中小行星与探测器初始状态建立小行星与探测器运动模型,同时建立小行星抵近探测器对小行星观测模型。
17、建立小行星运动模型如下:
18、
19、其中μ表示太阳引力常数,(t)表示时刻t的状态。
20、建立小行星运动模型如下:
21、
22、建立探测器对小行星的观测模型如下:
23、
24、其中lx为测角观测所得视线矢量x方向分量,ly为测角观测所得视线矢量y方向分量,lz为测角观测所得视线矢量z方向分量,d为雷达测距,以及vd为测量误差。
25、步骤三:设定采样数目、测角测距观测噪声标准差上下界,基于步骤一设定的小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数,以及步骤二建立的小行星与探测器运动模型、小行星抵近探测器对小行星观测模型,生成样本。其中样本的输入为测角观测噪声标准差σl以及测距观测噪声标准差σd,样本的输出定义为1或者-1,其中1表示使用均方根信息滤波算法,-1表示使用扩展卡尔曼滤波算法。
26、设定采样数目m、测角观测噪声标准差上界测角观测噪声标准差下界测距观测噪声标准差上界测距观测噪声标准差下界对于每个采样点,根据设定的测角观测噪声标准差上界测角观测噪声标准差下界测距观测噪声标准差上界测距观测噪声标准差下界随机生成测角观测噪声标准差σl以及测距观测噪声标准差σd,建立观测噪声矩阵r如下:
27、
28、根据观测噪声矩阵r,基于步骤一设定的小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数,以及步骤二建立的小行星与探测器运动模型、小行星抵近探测器对小行星观测模型,分别使用扩展卡尔曼滤波算法以及均方根信息滤波算法求解探测器估计状态,根据公式(8)计算平均估计误差e如下:
29、
30、该样本的输入为测角观测噪声标准差σl以及测距观测噪声标准差σd,当均方根信息滤波算法求解所得平均估计误差小于扩展卡尔曼滤波算法求解所得平均估计误差时,该样本的输出定义为1,否则为-1。
31、步骤四:基于步骤三所得样本训练svm模型,得到用于辨识是否需要使用均方根信息滤波算法的小行星抵近定轨分类模型。
32、步骤五:对于给定小行星抵近定轨场景,使用步骤四训练得到的小行星抵近定轨分类模型,辨识是否需要使用均方根信息滤波算法。如果需要使用均方根信息滤波算法,则使用均方根信息滤波算法进行抵近定轨,得到抵近探测器状态估计值;如果不需要,则使用扩展卡尔曼滤波算法进行抵近定轨,得到抵近探测器状态估计值,即基于支持向量机实现小行星抵近信息融合定轨。
33、还包括步骤六,基于步骤五得到的抵近探测器状态估计值,对小行星探测抵近轨迹进行规划,根据规划结果生成探测器执行制导、控制相关指令,实现对于目标小行星的抵近,进而对探测器进行绕飞、着陆、巡视探测。
34、有益效果:
35、1、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,设定小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数。建立小行星与探测器运动模型,建立小行星抵近探测器对小行星观测模型。设定采样数目、测角测距观测噪声标准差上下界,基于设定的小行星探测抵近初始时刻、初始时刻小行星状态、初始时刻探测器真实状态、初始时刻探测器估计状态、初始时刻探测器估计协方差矩阵、观测间隔、观测次数,以及建立的小行星与探测器运动模型、小行星抵近探测器对小行星观测模型,生成样本。基于所得样本训练svm模型,得到用于辨识是否需要使用均方根信息滤波算法的小行星抵近定轨分类模型。对于给定小行星抵近定轨场景,使用训练得到的小行星抵近定轨分类模型,辨识是否需要使用均方根信息滤波算法。如果需要使用均方根信息滤波算法,则使用均方根信息滤波算法进行抵近定轨,得到抵近探测器状态估计值;如果不需要,则使用扩展卡尔曼滤波算法进行抵近定轨,得到抵近探测器状态估计值。基于得到的抵近探测器状态估计值,对小行星探测抵近轨迹进行规划,探测器执行制导、控制相关指令,完成对于目标小行星的抵近,进而对探测器进行绕飞、着陆、巡视探测等。
36、2、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,训练小行星抵近定轨分类模型,减少计算数值奇异的同时有利于提高定轨精度。
37、3、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,通过随机生成样本,有利于提高训练得到的小行星抵近定轨分类模型的准确性。
38、4、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,在实现上述3个有益效果的基础上,本发明具有定轨精度高,估计误差小的优势,有利于减少小行星抵近定轨计算奇异问题,提升小行星抵近过程中探测器感知能力。
39、5、本发明公开的一种基于支持向量机的小行星抵近信息融合定轨方法,通过将小行星抵近替换为近地航天器运动模型、地月空间航天器运动模型,拓展应用于近地航天器运动估计、地月系统航天器运动估计,并解决航天器领域相关技术问题。
- 还没有人留言评论。精彩留言会获得点赞!