一种焦炉废气砣杆工作状态的检测方法和系统与流程
本发明涉及巡检机器人,具体涉及一种焦炉废气砣杆工作状态的检测方法和系统。
背景技术:
1、焦炉废气盘工作环境高温、含尘大,废气盘砣杆容易出现卡阻问题,导致出现砣盘无法提起或者下落。当卡阻导致砣盘无法提起时,会造成牵引砣杆的链条拉断,对应燃烧室燃烧后的废气无法排出;而当卡阻导致砣盘无法下落时,若出现在空气侧,则空气量供应不足,燃烧不充分,使炉温降低;若出现在煤气侧,则会造成煤气直接进入烟道,存在烟道形成爆炸性混合气体的安全风险,同时由于供应煤气量减少导致炉温降低。
2、针对焦炉废气盘砣杆工作状态检测这一问题,现有的产品主要是通过在焦炉废气系统中安装高清摄像头,上传图像到云端进行分析和处理,使用传统图像算法对砣杆位置、弯曲形状等进行识别和监测,以达到实时监测废气系统质量和性能的目的。如在焦炉机两侧各安装一套图像自动采集装置,检测焦炉废气开闭器断链自动检测系统,装置需要在高温、多尘等复杂环境下运行,图像自动采集装置的摄像头支架和传动杆频繁调节状态,都会影响图像采集质量,进而降低系统的检测准确性。
3、另一些产品则采用嵌入式传感器技术,通过安装在焦炉砣杆上的温度传感器设备,获取砣杆温度信号,通过分析温度变换,得出砣杆工作状态的相关特性。如依靠立火道自动测温的装置,利用各探头温度比对功能,即当某一探头在交换结束后所测立火道最高温度点与上次交换后所测的立火道最高温度点数据进行比较,温度差绝对值在50℃至100℃之间时系统判定为卡砣,发出报警声与信息提示。岗位人员及时检查报警信息与对应燃烧室立火道温度曲线,根据温度曲线到现场确认并处理。该比对方式只是简单地比较两次测量值之间的差异,而没有考虑其他因素的影响,如环境变化、测量误差等,检测精度相对较低,可能会导致误报或漏报。同时该方法需要在交换结束后进行比对,但在一些情况下,如立火道温度波动较小的情况下,可能无法检测到卡砣现象,因此该方法不能适用于所有情况。
技术实现思路
1、技术目的:针对上述技术问题,本发明提出了一种焦炉废气砣杆工作状态的检测方法和系统,其采用了qatm质量感知方法进行图像匹配,保证模板匹配鲁棒性和匹配效果,在图像优化分割时引入边缘检测损失与边界指导损失优化等,保证图像的语义分割效果,进而提高了废气盘坨杆状态识别精度。
2、技术方案:为实现上述技术目的,本发明采用了如下技术方案:
3、一种焦炉废气砣杆工作状态的检测方法,其特征在于,包括步骤:
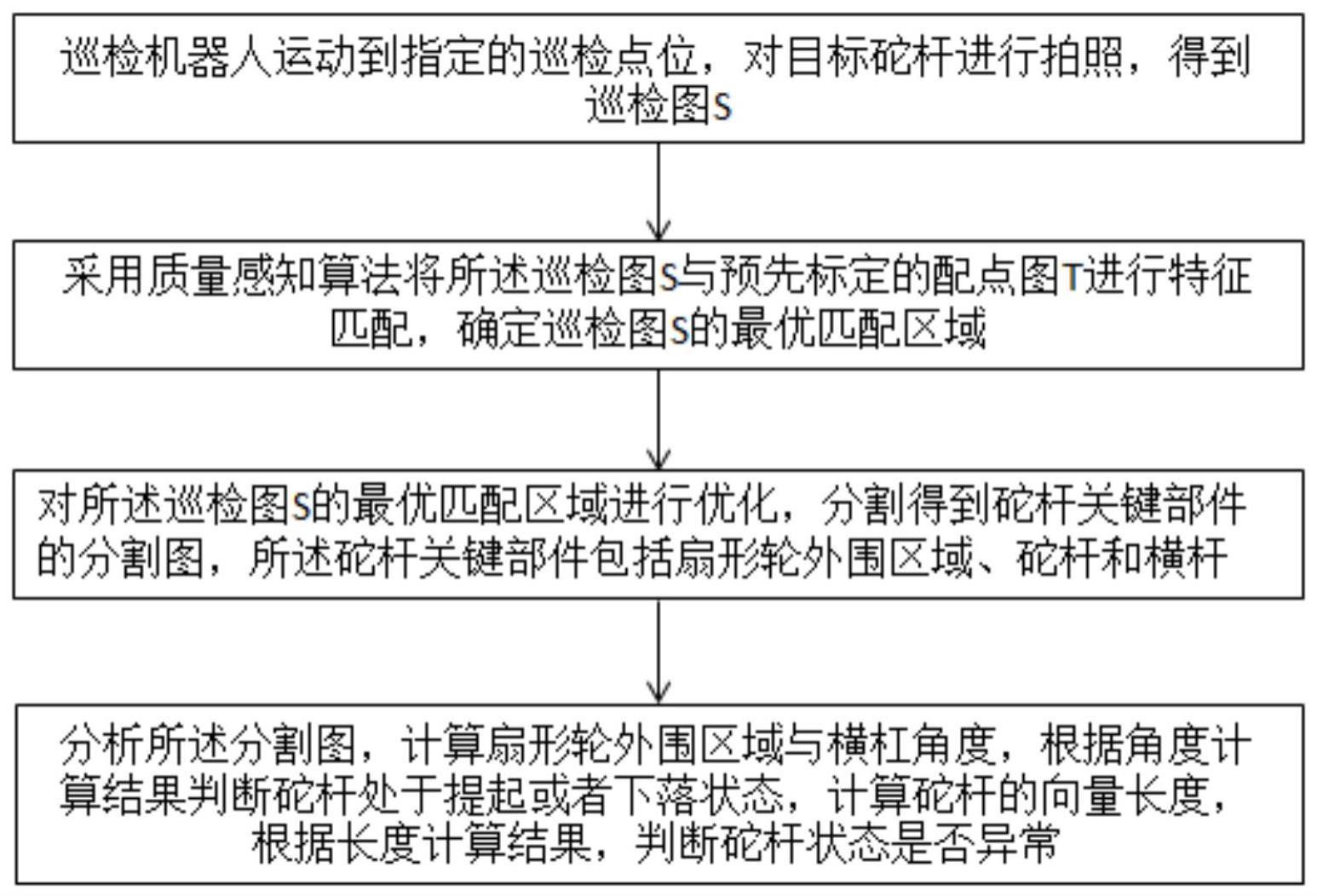
4、巡检机器人运动到指定的巡检点位,对目标砣杆进行拍照,得到巡检图s;
5、采用质量感知算法将所述巡检图s与预先标定的配点图t进行特征匹配,确定巡检图s的最优匹配区域;
6、对所述巡检图s的最优匹配区域进行优化,分割得到砣杆关键部件的分割图,所述砣杆关键部件包括扇形轮外围区域、砣杆和横杆;
7、分析所述分割图,计算扇形轮外围区域与横杠角度,根据角度计算结果判断砣杆处于提起或者下落状态,计算砣杆的向量长度,根据长度计算结果,判断砣杆状态是否异常。
8、优选地,所述采用质量感知算法包括步骤:
9、使用滑动窗口提取巡检图s中任一位于滑动窗口区域内的特征点;
10、将巡检图s中滑块提取的特征点与配点图t中的特征点进行相似度匹配,确定相互匹配的特征点即第一匹配点,进而确定巡检图s在配点图t中的第一相似度l(t|s):
11、
12、其中,s和t是匹配图像和模板上的滑块,设fs和ft是经过卷积后的滑块特征表示,ρ(·)是两个特征之间的余弦相似度度量,α是匹配参数。
13、将与配点图t匹配标定区域内的特征点与巡检图s中的特征点进行相似度匹配,确定相互匹配的特征点对即第二匹配点,进而确定配点图t在巡检图s中的第二相似度l(s|t):
14、
15、根据第一相似度l(t|s)和第二相似度l(s|t),计算s和t之间目标出现置信度的评价指标qatm(s,t),即
16、qatm(s,t)=l(t|s)·l(s|t)
17、使用滑动窗口遍历巡检图s中的所有位置,将计算得到的评价指标的最大值所在的位置,确定为巡检图的最优匹配区域。
18、优选地,采用改进的stdc-seg语义分割模型对所述巡检图s的最优匹配区域进行优化分割,得到砣杆关键部件的分割图,所述改进的stdc-seg语义分割模型包括输入input模块、stage1、stage2、stage3、stage4、stage5、特征对齐fam模块、特征融合ffm模块、seghead分割模块和输出output模块,优化分割流程包括:
19、输入input模块将输入图片通过预设步长的卷积层,计算得到预设通道数和尺寸的第一特征图;
20、第一特征图依次输入stage1和stage2,stage1和stage2均使用一个卷积层,用来提取特征,stage2输出第二特征图;
21、第二特征图依次输入stage3、stage4和stage5,其中,stage3、stage4和stage5均包括多个stdc模块,stage4和stage5均设置上采样操作,stage3输出空间特征信息,stage4和stage5分别输出第三特征图和第四特征图;
22、将第三特征图和第四特征图分别输入一个特征对齐fam模块,经特征对齐fam模块处理后得到对应的第五特征图和第六特征图;
23、将所述第四特征图、第五特征图和第六特征图进行融合,融合结果作为特征融合ffm模块的一个输入,用于提供高层次语义信息,stage3输出的空间特征信息作为特征融合ffm模块的另一个输入,用于提供低层次细节信息,特征融合ffm模块的输出第七特征图;
24、seg head分割模块对第七特征图进行分割处理,得到砣杆关键部件的分割图,由输出output模块输出。
25、优选地,所述特征对齐fam模块包括:低级特征图输入模块、高级特征图输入模块、特征选择fsm模块、第一concat层、卷积层、第二concat层、可变形卷积dcn层、激活层、对齐palgin层;
26、其中,低级特征图输入模块输出的低级特征图作为特征选择fsm模块的输入,所述特征选择fsm模块用于增强低级特征图中的空间信息,即下式:
27、
28、
29、其中,pselected表示特征选择之后的特征图;plow表示低级特征图,表示连续选择当前特征图的特征;conv表示1×1卷积,σ(·)表示sigmoid函数,wselection表示可学习的参数;
30、特征选择fsm模块导出特征选择之后的特征图和高级特征图输入模块输出的高级特征图均作为为第一concat层的输入,经第一concat层和卷积层处理后,得到的特征图作为第二concat层的输入,同时,第二concat层的输入还包括高级特征图输入模块输出的高级特征图;
31、第二concat层输出的特征图作为可变形卷积dcn的输入,所述可变形卷积dcn用于学习高级特征图和特征选择fsm模块导出的特征图之间的偏移,利用偏移量实现pselected和高级特征图之间的特征对齐和融合,对齐paligned层输出对齐的特征图,即下式:
32、
33、其中,paligned表示对齐的特征图,phigh表示高级特征图,f(·)表示可变形卷积,conv表示1×1卷积,表示两个特征图的按通道连接。
34、优选地,所述改进的stdc-seg语义分割模型设有边界检测头和边界引导损失头,引入基于边界监督的边界引导损失,约束边界检测,整体模型的损失函数lall为:
35、lall=lseg+λ1lb+λ2lg
36、其中,lseg表示分割模型的损失,λ1、λ2是超参数,lb表示边界检测损失,lg表示边界指导损失;
37、所述边界检测头在改进的stdc-seg语义分割模型训练时引入、应用期间被移除。
38、优选地,所述边界检测头中,将边界标签作为边界检测的真值,所述边界标签是指在像素级别上,将处于不同语义类别之间的像素点标记为边界标签;其中,
39、lb=ldice(pd,gd)+lbce(pd,gd)
40、ldice表示dice损失,lbce表示二进制交叉熵损失;pd表示边界检测头预测的边界概率图即即测结果,gd表示对应的细节实况即真实标签;
41、所述边界引导头中,lg=lce(pms,ys),pms=mb(ps)
42、lce为交叉熵损失,ys为语义分割真值,mb表示置信度二进制掩码,ps表示边界引导头预测的边界概率。
43、优选地,在巡检机器人启动之前,还包括步骤:
44、构建巡检机器人的巡检地图;
45、配置巡检机器人的巡检点位信息和砣杆状态识别规则,其中,巡检点位信息包括待进行状态检测的各个巡检点位的砣杆运行的上限位置和下限位置,砣杆状态识别规则中包括预先标定的配点图;
46、巡检机器人根据巡检地图和配置的巡检点位信息,选择巡检路径,进行巡检。
47、一种焦炉废气砣杆工作状态的检测系统,包括:
48、巡检图获取模块,用于通过巡检机器人运动到指定的巡检点位,对目标砣杆进行拍照,得到巡检图s;
49、图像匹配模块,用于采用质量感知算法将所述巡检图s与预先标定的配点图t进行特征匹配,确定巡检图s的最优匹配区域;
50、优化分割模块,用于对所述巡检图s的最优匹配区域进行优化,分割得到砣杆关键部件的分割图,所述砣杆关键部件包括扇形轮外围区域、砣杆和横杆;
51、分析判断模块,用于分析所述分割图,计算扇形轮外围区域与横杠角度,根据角度计算结果判断砣杆处于提起或者下落状态,计算砣杆的向量长度,根据长度计算结果,判断砣杆状态是否异常。
52、优选地,还包括:
53、巡检地图构建模块,用于构建巡检机器人的巡检地图;
54、信息规则配置模块,用于配置巡检机器人的巡检点位信息和砣杆状态识别规则,其中,巡检点位信息包括待进行状态检测的各个巡检点位的砣杆运行的上限位置和下限位置,砣杆状态识别规则中包括预先标定的配点图;
55、巡检控制模块,用于控制巡检机器人根据巡检地图和配置的巡检点位信息,选择巡检路径,进行巡检。
56、优选地,所述巡检机器人设有升降臂、可见光相机、红外相机和云台。
57、有益效果:由于采用了上述技术方案,本发明具有如下有益效果:
58、本发明利用qatm质量感知模板匹配模型提高模板匹配鲁棒性,提高机器人配点图与巡检图匹配效果,利用fam特征对齐模块、边缘检测损失与边界指导损失优化语义分割效果,提高废气盘坨杆状态识别精度,本发明较于其他方式更加高效、安全,同时精度更高,而且具有数据查看、数据收集和告警等优势,可以有效提效率和准确性,保障焦炉企业稳定和高质量的产出。
- 还没有人留言评论。精彩留言会获得点赞!