基于时间序列预测的无人飞行器滑跑状态异常检测方法与流程
本发明涉及无人飞行器监测领域,具体涉及基于时间序列预测的无人飞行器滑跑状态异常检测方法。
背景技术:
1、面向无人飞行器的运行状态监测和评估技术可以及时地发现其运行状态异常,保障无人飞行器的飞行安全。现有无人飞行器的异常检测方法通常包括基于模型的方法、基于知识的方法和数据驱动的方法。基于模型的异常检测方法需要能够对研究对象进行精确建模,其中包括机体模型、环境模型、传感器模型和执行机构模型等,但是,由于上述模型间的相互耦合,通常难以构建精确地模型,限制了该类方法在无人飞行器异常检测中的应用。基于知识的异常检测方法因依赖于专家经验的丰富程度,难以快速建立,随着无人飞行器迭代速度逐渐加快,基于知识的方法很难适应型号快速研制任务下的异常检测需求。数据驱动的方法直接利用无人飞行器内部各设备运行状态的监测数据进行异常检测,可有效解决无人飞行器结构复杂和任务场景不确定特性下的系统行为建模难题,以及专家先验知识不足等问题。
2、无人飞行器在起飞和着陆滑跑过程中,易受到海拔和温度等外界因素,以及无人飞行器内部各子系统工作状态的影响而发生故障,如舵面异常、减速伞弹出异常等。这些异常会直接反映在无人飞行器的指示空速上,因此,可以通过判断无人飞行器的滑跑状态与其指示空速是否对应,以检测其是否出现滑跑状态异常。当前针对滑跑状态异常检测使用的是针对加速度直接进行阈值判断的方法,这种方法的鲁棒性较差,很难适应外界环境的变化带来的影响。因此,需要一种结合多种反映飞行状态参数对滑跑状态进行异常检测的智能方法,以提高异常检测能力。
3、无人飞行器滑跑状态异常检测属于典型的时间序列预测任务,这类任务的主要方法包括自回归模型、支持向量回归和长短时记忆网络(long short-term memory,lstm)等。传统的回归模型鲁棒性差,难以应对外界环境的变化,易产生误检。支持向量回归的方法会随数据集增大,消耗大量的时间和计算资源。而lstm是一种基于循环神经网络的方法,通常只需要构建轻量级的模型就可以完成时间序列回归任务,适合本任务目标。
4、现在相关的专利如专利申请号cn201710729247.0,名为《一种判断无人机减速异常的方法》的发明专利,其公开了一种无人机的减速异常自主判断方法,属于无人机的控制技术领域。所述方法包含地速求解器、减速度求解器和减速异常判断器。地速求解器通过无人机传感器系统提供的东向、北向速度,即时计算地速;减速度求解器通过地速求解器计算的地速信息,即时计算无人机的减速度;减速异常判断器通过无人机的减速度判断无人机是否出现减速异常。
5、而该专利仅依赖地速对减速滑跑状态进行评估,减速度异常依赖于单一阈值,且没有明确的阈值确定方法。
技术实现思路
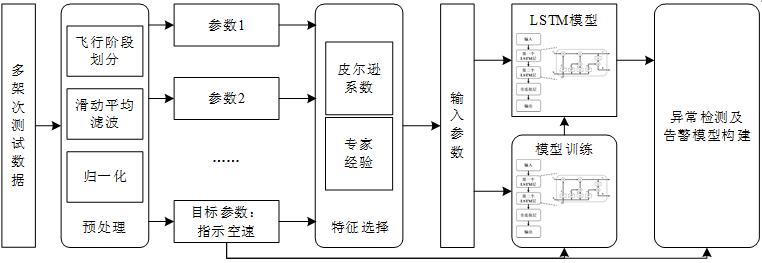
1、本发明面向无人飞行器的运行状态评估,旨在解决起飞和着陆滑跑过程中,根据飞行状态参数对滑跑状态进行异常检测的问题,提出了基于时间序列预测的无人飞行器滑跑状态异常检测方法,该方法通过对指示空速进行表征建模,并与传感器测得的指示空速进行对比,实现无人飞行器滑跑状态的异常检测和告警。
2、为了实现上述发明目的,本发明的技术方案如下:
3、基于时间序列预测的无人飞行器滑跑状态异常检测方法,包括如下步骤:
4、步骤s1、选定与滑跑加减速相关的参数用于表征无人飞行器的滑跑状态;
5、步骤s2、基于lstm的回归预测算法建立无人飞行器滑跑状态的表征模型,以表征参数作为输入,输出估计的指示空速;
6、步骤s3、根据指示空速的历史数据及其相应的表征参数对表征模型进行离线训练;
7、步骤s4、将传感器实时采集到的表征参数输入训练好的表征模型得到估计的指示空速;
8、步骤s5、将估计的指示空速与传感器测得的指示空速进行对比,基于残差阈值和拉依达准则判断无人飞行器滑跑过程中的加减速状态是否出现异常。
9、进一步的,通过计算各项相关参数b与指示空速va的皮尔逊系数,选取皮尔逊系数接近于-1或1的相关参数作为滑跑状态的表征参数。
10、进一步的,皮尔逊系数通过下式计算:
11、
12、其中,va=[va1,va2,…,vai],vai表示第i个时间单位飞行器传感器记录的指示空速;b=[b1,b2,…,bi],也是一个长度为i的时间序列,和分别表示va和b的均值。
13、进一步的,通过如下公式求得va和b的均值:
14、
15、进一步的,选定的表征参数包括:攻角、大气总温、飞机重量、引气温度、发动机压气机出口压力、左右机轮速度、发动机燃油总管压力。
16、进一步的,基于lstm的状态表征模型由两个lstm层和一个全连接层构成,
17、表征模型输入的飞行参数用x表示为:
18、x=[x1,x2,…,xi]
19、其中,xi表示构造的第i个时刻的输入参数,它由i时刻的表征参数构成,因此可以表示为:
20、xi=[αi,βi,…,γi]
21、其中,α,β…γ分别对应各项表征参数。
22、进一步的,表征模型输出的估计指示空速与输入飞行数据变量间的映射关系表示为:
23、
24、其中,tlstm(·)表示表征模型的输入和输出的映射关系,m表示输入数据的维度。
25、进一步的,所述的基于残差阈值和拉依达准则判断无人飞行器滑跑过程中的加减速状态是否出现异常,包括如下步骤:
26、计算估计的指示空速与传感器测得的指示空速在每个时刻i的差值μ,则可构成向量μ:
27、
28、μ=[μ1,μ2,…,μi]
29、计算该向量μ的均值和标准差:
30、
31、
32、根据拉依达准则,若差值μk落在到范围内,则无人飞行器滑跑过程中的加减速状态正常;若差值μk超出该范围,则认为无人飞行器滑跑过程中的加减速状态出现了异常。
33、综上所述,本发明具有以下优点:
34、1、本发明通过选择能够表征无人飞行器滑跑状态的相关参数,建立了滑跑状态估计模型,根据滑跑状态估计模型的结果,构建了滑跑状态异常检测模型,该检测模型利用无人飞行器正常滑跑时的飞行数据进行建模,可以根据无人飞行器当前的运行状态预测出正常情况下的滑跑状态,通过将实际的滑跑状态和估计的滑跑状态进行对比,可使用统计方法评估无人飞行器滑跑过程是否存在异常,并给出告警信息。模型分析效率高,实用性好,在保证无人机飞行安全方面具有极大的推广应用价值;
35、2、本发明通过相关参数估计理想的指示空速,并通过统计的方法给出具体的异常检测阈值,相比于仅利用阈值进行判断能适应更多工况,更准确地对滑跑状态进行监测;
36、3、本发明使用了皮尔逊系数与专家经验结合的参数选择方式,前者基于参数间的关联性进行参数选择,而后者则可以对前者选择的参数进行遴选并添加包含隐含关联性的参数,这种方法能够使模型更准确地反映无人飞行器的速度变化;
37、4、本发明在表征模型构建方面使用了lstm方法,对时间序列映射方法建模,它可以挖掘输入数据与输出数据之间的关联,生成映射模型;
38、5、本发明在异常检测及告警模型构建方面,使用了基于拉依达准则的方法对估计的指示空速与传感器测得的指示空速进行比较,并对其残差进行自动判读,为保证结果的可信度,将阈值设定为均值加减三倍标准差,这样极大地降低虚警率,保证不会因为较小的波动而导致系统虚警。
- 还没有人留言评论。精彩留言会获得点赞!