一种基于多维时空的谱三向模糊轨迹聚类方法及系统与流程
本发明涉及时间序列分析,具体为一种基于多维时空的谱三向模糊轨迹聚类方法及系统。
背景技术:
1、轨迹聚类是将具有相似运动模式或行为的轨迹数据归为一类,从而帮助理解和发现轨迹数据中的模式和规律,提高对移动对象的运动行为的理解,可用于任务分类、异常行为检测和轨迹预测等。轨迹聚类的研究主要分为两步,相似度度量和轨迹聚类。相似度度量方面,现有常用的轨迹距离算法(dtw距离,豪斯多夫距离等)普遍存在异常值敏感和忽略轨迹变化趋势的问题。轨迹聚类方面,大部分研究者用基于密度的方法对轨迹进行聚类,然而这类算法只适用于密差异较大的凸形数据集,限制了其在处理复杂数据集上的应用。此外,目前大多聚类都忽略了轨迹的时间关联性且易受噪声轨迹的干扰,影响其结果的准确性和稳定性。
2、本发明提出一种基于时间与多维空间的谱三向模糊轨迹聚类模型克服了传统模型的限制,以提供更准确和有意义的轨迹聚类结果。通过结合谱聚类、多维数据处理技术和噪声处理,本发明的模型能够很好地分组涡旋轨迹数据,揭示海洋涡旋不同时间的移动模式,对海上风能资源评估和风电场设计有着重要意义。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:现有的模糊轨迹聚类方法存在异常值敏感和忽略轨迹变化趋势,以及如何关注轨迹的时间关联性的优化问题。
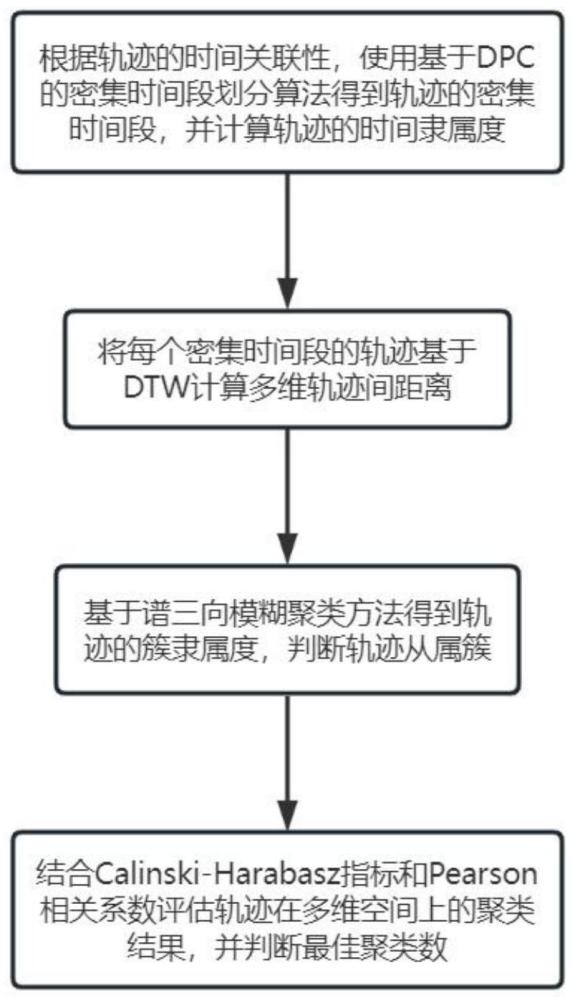
3、为解决上述技术问题,本发明提供如下技术方案:一种基于多维时空的谱三向模糊轨迹聚类方法,包括:根据轨迹的时间关联性,使用基于dpc的密集时间段划分算法得到轨迹的密集时间段,并计算轨迹的时间隶属度;将每个密集时间段的轨迹基于dtw计算多维轨迹间距离;基于谱三向模糊聚类方法得到轨迹的簇隶属度,判断轨迹从属簇;结合calinski-harabasz指标和pearson相关系数评估轨迹在多维空间上的聚类结果,并判断最佳聚类数。
4、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类方法的一种优选方案,其中:所述使用基于dpc的密集时间段划分算法得到轨迹的密集时间段包括根据轨迹的时间属性确定时间轴的长度和单位,并将轨迹数据映射至时间轴上,计算轴上的单位时间轨迹密度,确定轨迹数量,根据时间轴长度确定时间窗口大小,计算单位时间窗口内的局部密度和相对距离,表示为:
5、
6、
7、其中,t为时间轴长,ρj为时间点j的密度,ldi表示局部密度,dij表示时间点i与最小ld时间点的距离,rdi为相对距离,根据局部密度和相对距离构建决策图,并确定密集时间段划分点的数量和值,确定密集时间段,依据密集时间段对轨迹数据集进行划分,并计算轨迹于密集时间段的时间隶属度,表示为:
8、
9、其中,表示轨迹tri在密集时间段dtij上的时间隶属度,和表示tri和dtij的开始时间,和表示tri和dtij的结束时间。
10、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类方法的一种优选方案,其中:所述计算多维轨迹间距离包括将多维轨迹根据特征变化进行分割,得到由首尾采样点组成的轨迹段,使用动态规划算法来找到两轨迹段间最佳的对齐路径,使匹配距离最小,两轨迹间距离等于轨迹上所有匹配段距离之和,表示为:
11、
12、
13、
14、其中,si与sj分别为从属于tra和trb轨迹的轨迹段,为si与sj的相对权重,等于匹配段于两条轨迹长度的占比,||si-sj||为si中点与sj中点的距离,为si与sj的变化率之差,τ为距离权重。
15、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类方法的一种优选方案,其中:所述基于谱三向模糊聚类方法得到轨迹的簇隶属度,判断轨迹从属簇包括基于图论把轨迹数据为连接图,根据轨迹距离矩阵计算高斯核权重矩阵和度矩阵,高斯核权重计算表示为:
16、
17、其中mij表示tri与trj的距离,wij表示tri与trj相连边上的权重,σ调节高斯分布的参数,根据节点相连的边的权重之和构建对角线度矩阵d,对角线度矩阵减去高斯核权重矩阵得到拉普拉斯矩阵,并进行标准化,将拉普拉斯矩阵特征分解获取最少k个特征值的特征向量,其中k为聚类数,特征向量作为输入,通过三向模糊聚类得到轨迹的三向簇隶属度,收敛后得到轨迹的簇隶属度,判断轨迹的所属簇。
18、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类方法的一种优选方案,其中:所述三向模糊聚类包括随机初始化隶属度矩阵u,值域为[0,1],根据隶属度计算簇cp的中心表示为:
19、
20、其中,m为模糊指数,n为轨迹数量,uip表示tri于簇cp的隶属度,表示tri特征向量的第i个行向量;根据轨迹i至簇中心的距离计算轨迹的簇隶属度(uip),表示为:
21、
22、其中dip表示和的欧式距离,k为聚类数,轨迹的簇隶属度的三向化表示为:
23、
24、其中ε为三向界定阈值,x表示大于三向界定阈值和轨迹的时间隶属度乘积的最小数量集合,对三向隶属度进行标准化表示为:
25、
26、迭代更新簇中心和隶属度矩阵,直到u收敛或簇中心不再变化,则停止迭代。
27、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类方法的一种优选方案,其中:所述结合calinski-harabasz指标和pearson相关系数评估轨迹在多维空间上的聚类结果包括评估轨迹多特征聚类结果表示为:
28、
29、其中,bcsst表示簇间轨迹的特征t与时间的pearson系数的平均值的方差,wcsst表示各簇内轨迹的特征t与时间的相关系数的方差的平均值。
30、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类方法的一种优选方案,其中:所述判断最佳聚类数包括根据不同聚类数k下的值判断最佳聚类数,chf指数的数值越高,聚类结果效果越好。
31、本发明的另外一个目的是提供一种基于多维时空的谱三向模糊轨迹聚类系统,其能计算多维轨迹之间的相异性,通过段与段间匹配量化轨迹整体变化差异,解决了噪声对计算的影响的问题。
32、作为本发明所述的基于多维时空的谱三向模糊轨迹聚类系统的一种优选方案,其中:包括数据预处理模块,轨迹特征提取模块,轨迹聚类模块,评估模块;所述数据预处理模块用于根据轨迹的时间属性确定时间轴的长度和单位,将轨迹数据映射至时间轴上,计算轴上的单位时间轨迹密度;所述轨迹特征提取模块使用基于dpc的密集时间段划分算法得到轨迹的密集时间段,计算轨迹的时间隶属度,基于dtw计算多维轨迹间距离;所述轨迹聚类模块基于谱三向模糊聚类方法得到轨迹的簇隶属度并判断轨迹的所属簇;所述评估模块结合calinski-harabasz指标和pearson相关系数评估轨迹在多维空间上的聚类结果并分析最优结果。
33、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序是实现基于多维时空的谱三向模糊轨迹聚类方法的步骤。
34、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现基于多维时空的谱三向模糊轨迹聚类方法的步骤。
35、本发明的有益效果:本发明提供的基于多维时空的谱三向模糊轨迹聚类方法提出了一种新的密集时间段划分算法,用来挖掘轨迹在时间上的分布,从而得到密集时间段,把轨迹从时间上进行划分并计算轨迹的时间隶属度。在动态时间规划dtw的算法基础上提出了一种新的算法来计算多维轨迹之间的相异性,通过段与段间匹配量化轨迹整体变化差异,并且降低噪声对计算的影响。提出了一种轨迹聚类算法——谱三向模糊聚类,将聚类问题转化为图上的切割可适用于非凸数据集,同时结合了软聚类和硬聚类更好地描述轨迹于不同集群的隶属关系,并且良好地处理了噪声影响。结合calinski-harabasz指数和pearson相关系数提出新的轨迹评估方法来评估整体轨迹多维空间上的聚类结果,以此来判断最佳聚类数。本发明在去除噪声和适用性方面都取得更加良好的效果。
- 还没有人留言评论。精彩留言会获得点赞!