一种无人船自噪声检测识别方法及系统
本发明属于自噪声检测,尤其涉及一种无人船自噪声检测识别方法及系统。
背景技术:
1、自主式水下航行器(auv)在海洋探测方向得到广泛应用,在水中自主航行的无人潜水器,具有自主航行、自主导航、自主探测的功能。由于auv平台较小,其自噪声严重制约搭载于平台的声纳系统系能。如何有效的检测auv的自噪声,对于平台系统实现最佳性能具有重要实际意义。
2、对于故障诊断,目前主要包括震动诊断、温度分析等。其中,震动诊断的设计领域较广,理论基础较为雄厚,研究较为充分;随着计算机技术、嵌入式技术以及新兴仪器技术的发展,故障诊断装置和仪器已经由最初的模拟式检测仪发展到现在的基于计算机的实时在线检测。
3、由于不同的无人潜水器的外观、尺寸以及机械结构等存在很大差异,auv所造成自噪声包括机械噪声、水动力噪声、螺旋桨噪声都会不同,这也造成现存的自噪声研究,多是对特定船舶或者设备的,并且对这三者的研究大多围绕直接在声学系统中消除这三种噪声例如:上海交通大学的王德禹等人研究了潜艇结构-生辐射优化设计问题,是采用多目标优化设计进行自噪声控制;华中科技大学的石仲堃等人基于神经网络、遗传算法等智能算法的声纳平台自噪声预报研究;西北工业大学的杨云川等人则研究了基于水声物理场的声纳自噪声仿真方法及研究。而专门检测以及存储自噪声的通用平台或者项目的研究很少对于自噪声检测问题,本身具有重要意义,测量自噪声,不仅可以为确定auv平台提供总体设计方案,而且能对主要机电设备运转进行故障诊断和报警,还可以判断螺旋桨空化的初生与发展从而确定其临界转速。此外,检测自噪声对采用减震降噪技术措施后的评估和探索自噪声、结构噪声、舱室空气噪声、辐射噪声之间的传播规律均有积极作用。
4、但是,目前对于自噪声的检测系统或模块现存方案很少,没有综合性的检测系统,且缺少对自噪声数据的收集以及存储。现存方案的自噪声检测主要针对单一指标进行检测,且主要针对特定的设备或仪器,缺乏通用性能;同时,对自噪声的检测缺少故障检测方面,检测方面比较局限。对于故障检测模块,现有震动诊断方案成本过高,应用方向主要是大型设备,应用场景比较局限。而基于计算机的实时在线检测,安装传感器往往是长期的装置,这会影响运动部件本身特性参数,且安装成本较高,故亟需一种新的自噪声检测识别方法。
5、通过上述分析,现有技术存在的问题及缺陷为:
6、(1)目前对于自噪声的检测系统或模块现存方案很少,没有综合性的检测系统,且缺少对自噪声数据的收集以及存储。现有方案的自噪声检测主要针对单一指标进行检测,且主要针对特定的设备或者仪器,缺乏通用性能;同时,对自噪声的检测缺少故障检测方面,检测方面比较局限。
7、(2)对于故障检测模块,现有震动诊断方案成本过高,应用方向主要是大型设备,应用场景比较局限。而基于计算机的实时在线检测,安装传感器往往是长期的装置,这会影响运动部件本身特性参数,且安装成本也很高。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种无人船自噪声检测识别方法及系统,所述技术方案如下:
2、本发明是这样实现的,无人船自噪声检测识别方法,该方法将yolov5深度学习算法应用于自噪声模型建立,使自噪声模型建立步骤清晰、操作简易;首次通过检测自噪声来对无人船进行故障检测,使无人船自噪声检测系统化、集成化;该方法包括以下步骤:
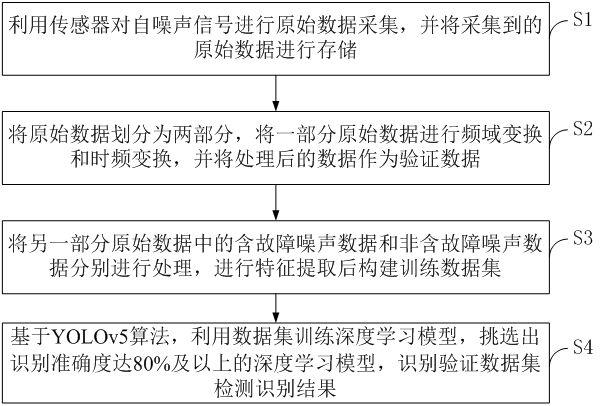
3、s1,利用传感器对自噪声信号进行原始数据采集,并将采集到的原始数据进行存储;
4、s2,将原始数据划分为两部分,将一部分原始数据进行频域变换和时频变换,并将处理后的数据作为验证数据;
5、s3,将另一部分原始数据中的含故障噪声数据和非含故障噪声数据分别进行处理,进行特征提取后构建训练数据集;
6、s4,基于yolov5算法,利用数据集训练深度学习模型,挑选出识别准确度达80%及以上的深度学习模型,识别验证数据集检测识别结果。
7、在步骤s1中,原始数据采集包括:
8、使用加速度传感器采集自噪声中的震动信号;
9、通过传声器收集噪声信号。
10、进一步,震动信号的采集包括对恒流源、加速度传感器、信号调制电路和数据采集卡的采集;
11、恒流源用于为加速度传感器、信号调制电路和数据采集设备提供恒定电流;加速度传感器采集震动信号,并经过滤波信号放大的信号调制传入采集卡进行a/d转化;将8个加速度传感器分别置于auv的不同位置,采用八通道iepe振动传感器数据高速同步网络采集卡ibf288对多传感器信号进行采集。
12、在步骤s2中,将一部分原始数据进行频域变换和时频变换,包括:
13、对于故障噪声利用基于残差的故障检测算法进行处理后,再进行频域变换得到谱图;
14、对非故障信号采用时频变换方式得到声谱图,将噪声谱进行分帧处理,并对每帧进行短时快速傅里叶变换得到频谱图,将频谱旋转90度并映射色彩图,得到最终的声谱图。
15、进一步,基于残差的故障检测算法利用状态预测值和突变的量测值差异,通过残差信号构造检测函数判断量测值中是否存在故障信号,再将残差振幅的时域信号进行stft和小波变换得到频域特征。
16、步骤s3中,将另一部分原始数据中的含故障噪声数据和非含故障噪声数据分别进行处理,进行特征提取后构建训练数据集,包括:修改待标注类型,选择标注图片中特征信号的画框,确定类别标签,对图片进行放大后利用labellmg软件建立数据库;在进行模型训练前,使用yolov5相对应代码将数据集划分为训练集和验证集;准备labels,从xml标注中获取bbox信息,并将数据集格式转换为yolo_txt。
17、在步骤s4中,基于yolov5算法,利用数据集训练深度学习模型,包括:对无人潜水器实测自噪声信号声谱图以及故障噪声频谱图进行模型制作,对比深度学习框架性能后选择pytorch作为深度学习模型,再进行pc端系统硬件配置,并搭建yolov5环境。
18、进一步,yolov5环境为yolov5s.yaml,训练时的参数配置为:图片长640、宽640,device选择使用gpu,线程数woekers设置为8;对训练次数epoch进行改变确定不同性能的模型,训练次数设置为50、100、200、300。
19、步骤s4中,识别验证数据集检测识别结果,包括:通过对比损失函数对比不同迭代次数下训练模型的性能;
20、在训练集对深度学习模型训练完毕后,利用验证集对深度学习模型进行测试,检测深度学习模型是否准确,并确定识别效果。
21、本发明的另一目的在于提供一种无人船自噪声检测识别系统,该系统实施所述的无人船自噪声检测识别方法,该系统包括:
22、原始数据采集模块,用于利用传感器对自噪声信号进行原始数据采集,并将采集到的原始数据进行存储;
23、验证数据集构建模块,用于将原始数据划分为两部分,将一部分原始数据进行频域变换和时频变换,并将处理后的数据作为验证数据;
24、训练数据集构建模块,用于将另一部分原始数据中的含故障噪声数据和非含故障噪声数据分别进行处理,进行特征提取后构建训练数据集;
25、噪声检测识别模块,基于yolov5算法,利用数据集训练深度学习模型,挑选出识别准确度达80%及以上的深度学习模型,识别验证数据集检测识别结果。
26、结合上述的所有技术方案,本发明所具备的优点及积极效果为:针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果,具体描述如下:本发明提供的无人船自噪声检测识别方法,首先对自噪声信号使用多种传感器进行原始数据采集,将采集到的原始数据进行存储;其次将原始数据分两部分处理,一部分作为验证数据,将此部分验证数据分别进行频域变换和时频变换,将处理后的数据作为验证数据;另一部分原始数据将含故障噪声数据和非含故障噪声分别进行处理,并进行特征提取制作训练数据集;然后使用yolov5算法使用数据集训练模型,并挑选出识别性能最好的模型--pytorch,最后识别验证数据集检测识别效果。因此,本发明解决了无人船自噪声检测问题。
27、本发明提供的无人船自噪声检测识别系统使用八通道iepe振动采集模块采集时间同步速度更快,采集数据更加准确。本发明将深度学习应用于自噪声检测模块,检测准确率更高且更加智能化。本发明的无人船自噪声检测识别系统存在自噪声存储模块:建立设备本身特有的自噪声数据库,为之后深度学习以及综合分析提供便利并且做到资源的利用。本发明增加故障检测模块,使得对自噪声的检测更加全面,且检测自噪声降低设备的损坏成本;故障检测模块应用基于残差的故障检测算法,提升神经网络的训练精度,同时故障检测也不再依赖于先验知识,提升检验效果。本发明的自噪声检测系统覆盖面比较全面,检测指标全面,最后的检测结果更加可靠性。本发明的检测模块具有通用性,不仅可以应用于auv自噪声检测,也可应用于其他设备的自噪声检测。
28、本发明提供的无人船自噪声检测识别系统增加了自噪声信息存储和故障检测模块,检测指标比较综合全面;系统具有模块化,通用性能较高。本发明解决没有充分利用和分析无人船自噪声问题。本发明通过对无人船自噪声进行分析实现对无人船自噪声特征检测和识别,并且通过自噪声检测无人船是否存在故障问题。使得对无人船自噪声的利用更加规范和系统化。
- 还没有人留言评论。精彩留言会获得点赞!