一种基于SVM的航行器磁异常分类方法及系统
本发明涉及水下航行器检测,具体涉及一种基于svm的航行器磁异常分类方法及系统。
背景技术:
1、磁异常探测技术是一种非接触式的被动探测方法,理论上可以感知地球上任何铁磁性物体的存在。水下航行器的内部设备、壳体由铁磁性材料制作而被看作是磁性目标,在地磁场的环境下运动时,受到磁化而使航行器所在区域的地磁场信号出现异常;通过航空机载磁探仪对航行器有可能出没海域进行磁场测量,提取地磁场信号中的异常数据从而判断水下航行器的存在以及位置。与其它探测方法相比,磁异常探测基本不受天气的影响,而且水作为介质来说,对静磁场几乎都是透明的,所以地磁异常探测方法特别适用于在水下隐蔽性目标的探测。从应用条件上看,磁异常探测技术在搜索狭窄的小面积海域或者浅海区域方面优于传统的水声探测技术,在一定程度上能补充水声探测的应用限制,有识别能力强、定位精度高和良好的隐蔽等优点。另外,声纳浮标在水声探测中是一次性消耗品,在历史上的军事应用中也曾不止一次出现声纳误判的事例,以磁力仪为主要搜索手段的磁异常探测技术可重复多次使用,将大大节约成本,具有重大的经济意义。
2、采用模式识别或智能算法进行磁异常信号的检测是新的发展。1975年wynn等[1]提出通过采集到的目标信号反推偶极子模型参数,实现对目标的定位方法;2017年,gao等人[2]提出利用非线性最小二乘方法,基于单个三分量磁传感器测量的磁场数据对动态目标的位置进行估计;2018年,zhang等[3]参考二维图像处理方法,将信号的时频表示通过卷积神经网络进行检测;后续还有基于alexnet迁移学习的相关研究[4],但在进行磁异常信号检测、特别是信号分类方面仍然具有较高的研究需求。
技术实现思路
1、为此,本发明提出一种基于svm的航行器磁异常分类方法及系统,以力图缓解或解决上述问题。
2、根据本发明的一方面,提出一种基于svm的航行器磁异常分类方法,该方法包括以下步骤:
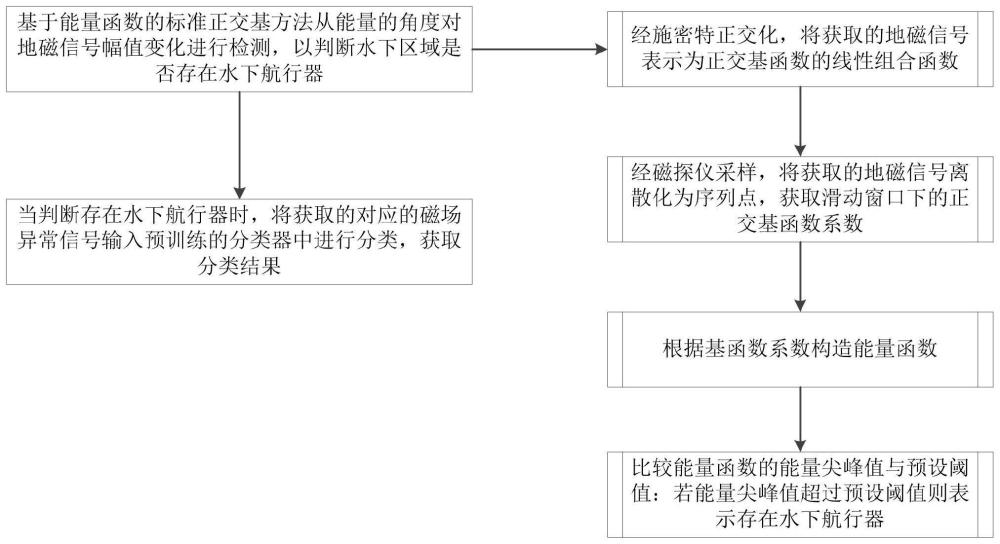
3、步骤一、基于能量函数的标准正交基方法从能量的角度对地磁信号幅值变化进行检测,以判断水下区域是否存在水下航行器;
4、步骤二、当判断存在水下航行器时,将获取的对应的磁场异常信号输入预训练的分类器中进行分类,获取分类结果。
5、进一步地,步骤一的具体步骤包括:
6、步骤一一、经施密特正交化,将获取的地磁信号表示为正交基函数的线性组合函数b(w);
7、步骤一二、经磁探仪采样,将获取的地磁信号离散化为序列点,获取滑动窗口下的正交基函数系数cn;
8、步骤一三、根据基函数系数cn构造能量函数e;
9、步骤一四、比较能量函数e的能量尖峰值与预设阈值:若能量尖峰值超过预设阈值则表示存在水下航行器。
10、进一步地,步骤一一中所述线性组合函数b(w)表示为:
11、
12、式中,r0表示水下航行器距离航空磁测平台探测航线的最近距离;m表示磁矩;an表示正交基系数;ψn(w)表示正交基函数;μ0表示真空磁导率。
13、进一步地,步骤一二中所述正交基函数系数cn表示为:
14、
15、式中,n=0,1,2;采样序列点数为2k+1个;δw表示采样点间隔;m表示滑动窗口中间点时刻。
16、进一步地,步骤一三中所述能量函数e表示为:
17、e=c02+c12+c22
18、式中,e表示磁场信号在三个正交基上的能量函数。
19、进一步地,步骤二中所述分类器为支持向量机。
20、进一步地,步骤二中所述磁场异常信号的形状包括4组特征,分别为:先峰后谷、先谷后峰、峰型、谷型;所述分类结果分别对应航空磁测平台与水下航行器的相对航向角的不同范围。
21、进一步地,步骤二中所述磁场异常信号的形状为先峰后谷,则航空磁测平台与水下航行器的相对航向角的范围为[0°,45°)∪[315°,360°];所述磁场异常信号的形状为先谷后峰,则航空磁测平台与水下航行器的相对航向角的范围为[105°,180°);所述磁场异常信号的形状为峰型,则航空磁测平台与水下航行器的相对航向角的范围为[45°,105°);所述磁场异常信号的形状为谷型,则航空磁测平台与水下航行器的相对航向角的范围为[180°,315°)。
22、进一步地,步骤二中将获取的对应的磁场异常信号在输入预训练的分类器之前进行以下处理:对所述磁场异常信号进行数据标准化处理;并通过特征重要性得分选择最佳特征序列。
23、根据本发明的另一方面,提出一种基于svm的航行器磁异常分类系统,该系统包括:
24、检测模块,其配置成基于能量函数的标准正交基方法从能量的角度对地磁信号幅值变化进行检测,以判断水下区域是否存在水下航行器;具体步骤包括:经施密特正交化,将获取的地磁信号表示为正交基函数的线性组合函数b(w);经磁探仪采样,将获取的地磁信号离散化为序列点,获取滑动窗口下的正交基函数系数cn;根据基函数系数cn构造能量函数e;比较能量函数e的能量尖峰值与预设阈值:若能量尖峰值超过预设阈值则表示存在水下航行器;
25、分类模块,其配置成当判断存在水下航行器时,将获取的对应的磁场异常信号输入预训练的分类器中进行分类,获取分类结果;其中所述分类器为支持向量机;所述磁场异常信号的形状包括4组特征,分别为:先峰后谷、先谷后峰、峰型、谷型;所述分类结果分别对应航空磁测平台与水下航行器的相对航向角的不同范围。
26、进一步地,所述分类模块中所述磁场异常信号的形状为先峰后谷,则航空磁测平台与水下航行器的相对航向角的范围为[0°,45°)∪[315°,360°];所述磁场异常信号的形状为先谷后峰,则航空磁测平台与水下航行器的相对航向角的范围为[105°,180°);所述磁场异常信号的形状为峰型,则航空磁测平台与水下航行器的相对航向角的范围为[45°,105°);所述磁场异常信号的形状为谷型,则航空磁测平台与水下航行器的相对航向角的范围为[180°,315°)。
27、进一步地,所述分类模块中将获取的对应的磁场异常信号在输入预训练的分类器之前进行以下处理:对所述磁场异常信号进行数据标准化处理;并通过特征重要性得分选择最佳特征序列。
28、本发明的有益技术效果是:
29、本发明基于机器学习算法和磁异常信号特征对水下航行器的航向区域进行分类,按照不同航向区域观测的磁异常信号具有先峰后谷、先谷后峰、峰型、谷型的不同特征,利用svm分类器实现对航行器相对航向区域的不同分类。实验结果表明,基于本发明方法,在航空平台与水下航行器间的垂直距离为600m、异常信号幅值为1nt以下时,样本数据由50m/s、100m/s不同探测速度与3级、5级、8级海况随意组合的情况下,分类准确率可达96.9%。
技术特征:
1.一种基于svm的航行器磁异常分类方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤一的具体步骤包括:
3.根据权利要求2所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤一一中所述线性组合函数b(w)表示为:
4.根据权利要求3所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤一二中所述正交基函数系数cn表示为:
5.根据权利要求4所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤一三中所述能量函数e表示为:
6.根据权利要求1所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤二中所述分类器为支持向量机。
7.根据权利要求1所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤二中所述磁场异常信号的形状包括4组特征,分别为:先峰后谷、先谷后峰、峰型、谷型;所述分类结果分别对应航空磁测平台与水下航行器的相对航向角的不同范围。
8.根据权利要求7所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤二中所述磁场异常信号的形状为先峰后谷,则航空磁测平台与水下航行器的相对航向角的范围为[0°,45°)∪[315°,360°];所述磁场异常信号的形状为先谷后峰,则航空磁测平台与水下航行器的相对航向角的范围为[105°,180°);所述磁场异常信号的形状为峰型,则航空磁测平台与水下航行器的相对航向角的范围为[45°,105°);所述磁场异常信号的形状为谷型,则航空磁测平台与水下航行器的相对航向角的范围为[180°,315°)。
9.根据权利要求1所述的一种基于svm的航行器磁异常分类方法,其特征在于,步骤二中将获取的对应的磁场异常信号在输入预训练的分类器之前进行以下处理:对所述磁场异常信号进行数据标准化处理;并通过特征重要性得分选择最佳特征序列。
10.一种基于svm的航行器磁异常分类系统,其特征在于,包括:
技术总结
本发明公开了一种基于SVM的航行器磁异常分类方法及系统,涉及水下航行器检测技术领域。本发明的技术要点包括:基于能量函数的标准正交基方法从能量的角度对地磁信号幅值变化进行检测,以判断水下区域是否存在水下航行器;当判断存在水下航行器时,将获取的对应的磁场异常信号输入预训练的分类器中进行分类,获取分类结果;其中,按照不同航向区域观测的磁异常信号具有先峰后谷、先谷后峰、峰型、谷型的不同特征,利用SVM分类器实现对航行器相对航向区域的不同分类。本发明可用于水下航行器的检测和定位。
技术研发人员:周洪娟,滕怡民,金涛,周志权,王晨旭
受保护的技术使用者:哈尔滨工业大学(威海)
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!