自主感知决策执行的智能无人系统软件在线更新演化方法
本发明涉及一种智能无人系统软件的更新演化技术,尤其是涉及一种自主感知决策执行的智能无人系统软件在线更新演化方法。
背景技术:
1、无人机、无人车、无人潜航器等为代表的智能无人系统软件是一类特殊的分布式结构的系统软件,系统软件的体系结构中本身集成了很多算法功能构件,加上系统自身带有移动属性,这些算法功能构件在不同位置场景下需要进行更新替换才能满足相应智能需求。即智能无人系统软件自投入使用后并不是一成不变,它是要不断地进行更新演化才能满足不同位置场景。此外,智能无人系统软件还具有全天候服务特点,智能无人系统软件执行全天候任务时是不允许停机进行更新,它需要在线更新演化才能保证智能服务的连续性。然而,目前还没有一种模型和技术能够同时解决自主感知不同位置场景自行驱动功能构件更新以及全天候服务不可停机更新的问题。
2、目前关于智能无人系统软件的更新演化主要采用静态更新演化技术。这种静态更新演化技术主要是要求智能无人系统软件在更新过程进行停机,然后对智能无人系统软件的体系结构中的功能构件信息更新替换。这种静态更新演化技术存在两个方面缺陷:其一为静态更新模型采用的是传统的需求变化和环境变化驱动的静态更新模型,没有位置信息变化驱动更新机制,然而智能无人系统软件有别于传统系统软件,它更加依赖位置变化后自主感知驱动软件构件更新,目前的静态更新方法不能满足位置变化自主感知驱动的更新模型;其二为智能无人系统软件采用静态更新技术,需要停机进行更新演化,不能满足智能无人系统软件全天候服务不停机特点,使得智能无人系统软件的应用场景受限。
技术实现思路
1、本发明所要解决的技术问题是通过分析目前智能无人系统软件的静态更新演化方法的优缺点以及位置变化感知驱动的在线更新机制安全可靠要求,提供一种自主感知决策执行的智能无人系统软件在线更新演化方法,其能够有效解决智能无人系统软件在位置场景变化情况下,实现不停机地安全在线更新演化的问题。
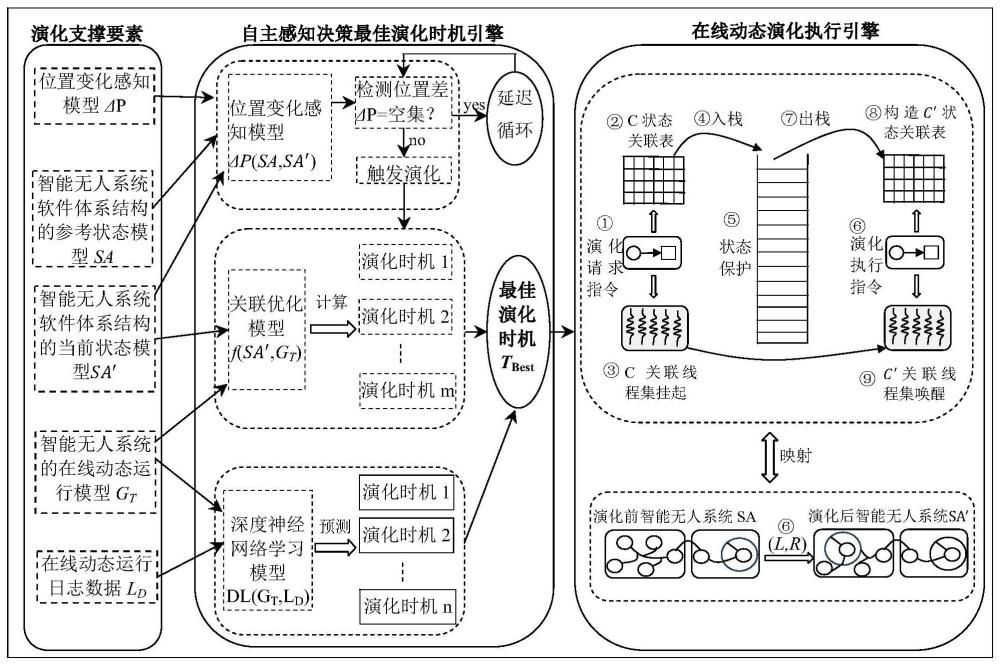
2、本发明解决上述技术问题所采用的技术方案为:一种自主感知决策执行的智能无人系统软件在线更新演化方法,其特征在于包括以下三个阶段:
3、第一阶段,演化支撑要素建模阶段,具体步骤如下:
4、步骤1.1:构建位置变化感知模型δp,用于检测环境位置是否发生变化,δp由多种位置和功能构件抽象关系的差分图组成,当δp不为空集时表示检测到环境位置发生变化,触发自主演化;当δp为空集时表示检测到环境位置未发生变化;
5、步骤1.2:构建智能无人系统软件体系结构的参考状态模型sa,sa使用一个bigraph偶图进行描述,bigraph偶图由一个位置图和一个连接图组成;同样,构建智能无人系统软件体系结构的当前状态模型sa',sa'也使用一个bigraph偶图进行描述;
6、步骤1.3:构建智能无人系统的在线动态运行模型gt,gt由从智能无人系统的启动运行时刻至参考时刻期间所有线程的运行轨迹图组成;然后获取在线动态运行日志数据ld,ld就是在线动态运行模型gt的快照日志数据的集合;
7、第二阶段,自主感知决策最佳演化时间引擎阶段,具体步骤如下:
8、步骤2.1:利用位置变化感知模型δp检测智能无人系统软件体系结构的参考状态模型sa和当前状态模型sa',若δp不为空集,则触发自主演化,然后执行步骤2.2;若δp为空集,则按设定的延时时长进行延迟循环检测;
9、步骤2.2:根据智能无人系统软件体系结构的当前状态模型sa'和智能无人系统的在线动态运行模型gt,并利用关联矩阵模型,计算出m个安全性好、及时性高、干扰性小的演化时机;并使用智能无人系统的在线动态运行模型gt和在线动态运行日志数据ld,对深度神经网络学习模型进行训练和学习,预测出n个安全性好、及时性高、干扰性小的演化时机;再利用best(m,n)函数从m+n个演化时机中获取最佳演化时机tbest;其中,m≥1,n≥1;
10、第三阶段,在线动态演化执行引擎阶段,具体步骤如下:
11、步骤3.1:在最佳演化时机tbest到来之际,智能无人系统软件发出演化请求指令;然后构造被演化更新的老功能构件的状态构成的状态关联表,同时将被演化更新的老功能构件关联的线程挂起;接着将状态关联表进行入栈以进行状态保护;在状态保护就绪后,智能无人系统软件发出演化执行指令,将智能无人系统软件体系结构的参考状态模型sa演化更新为当前状态模型sa';
12、步骤3.2:在智能无人系统软件体系结构演化更新后,将栈中的状态关联表进行出栈,构造演化更新后体系结构中的新功能构件的状态构成的新状态关联表,同时将演化更新后体系结构中的新功能构件关联的线程唤醒,从而恢复智能无人系统软件运行,完成在线更新演化过程。
13、所述步骤1.1中,δp描述为:δp={δp1=g1-g'1,δp2=g2-g'2,δp3=g3-g'3,δp4=g4-g'4,δp5=g5-g'5};其中,δpi表示第i种位置和功能构件抽象关系的差分图,i=1,2,3,4,5,gi表示第i种位置和功能构件抽象关系在参考时刻的状态,g'i表示第i种位置和功能构件抽象关系在当前时刻的状态。
14、选取具有完备性的相离、相交、非正切、相等和逆非正切共5种位置空间元拓扑关系,这5种位置空间元拓扑关系都由两个独立位置根据关系不同组成,任意一个功能构件只位于一个独立位置,当该功能构件从这个独立位置移动到与这个独立位置有关系的另外一个独立位置后,该功能构件就要被替换,即被替换成符合另外一个独立位置要求的功能构件,以此获得5种位置和功能构件抽象关系,每种位置和功能构件抽象关系视作一种位置空间和功能构件空间的混合抽象图,这种混合抽象图与bigraph偶图具有相同的本质。
15、所述步骤1.2中,sa描述为:sa=(sap,sal)=(c,e,ctrl,prnt,link):<g,x>→<d,y>;其中,sap表示在参考时刻下体系结构中的所有功能构件的位置图,sap=(c,ctrl,prnt):g→d,sal表示在参考时刻下体系结构中的所有功能构件的连接图,sal=(c,e,ctrl,link):x→y,c表示在参考时刻下体系结构中的所有功能构件构成的集合即节点集,e表示在参考时刻下体系结构中的功能构件之间的连接关系构成的集合,ctrl表示在参考时刻下体系结构中的功能构件的控制类型,prnt表示在参考时刻下的嵌套关系父映射,link表示在参考时刻下的连接映射,<g,x>表示在参考时刻下bigraph偶图的内部接口,<d,y>表示在参考时刻下bigraph偶图的外部接口;
16、同样,sa'描述为:sa'=(sap',sal')=(c',e',ctrl',prnt',link'):<g,x>→<d,y>;其中,sap'表示在当前时刻下体系结构中的所有功能构件的位置图,sap'=(c',ctrl',prnt'):g→d,sal'表示在当前时刻下体系结构中的所有功能构件的连接图,sal'=(c',e',ctrl',link'):x→y,c'表示在当前时刻下体系结构中的所有功能构件构成的集合即节点集,e'表示在当前时刻下体系结构中的功能构件之间的连接关系构成的集合,ctrl'表示在当前时刻下体系结构中的功能构件的控制类型,prnt'表示在当前时刻下的嵌套关系父映射,link'表示在当前时刻下的连接映射。
17、所述步骤1.3中,gt描述为:gt=(τ0,t,h);其中,τ0表示智能无人系统软件的启动运行时刻,t表示参考时刻,h表示从τ0到t期间所有线程的运行轨迹图构成的集合,h={h1,h2,…,hk},hk表示从τ0到t期间第k个线程的运行轨迹图,hk=(ck,ek,sc,sh,ts),ck表示从τ0到t期间第k个线程所需调用的功能构件构成的集合,ek表示从τ0到t期间第k个线程所需调用的功能构件之间的连接关系构成的集合,sc表示在参考时刻下第k个线程所需调用的功能构件的状态,sc的值为finished或exe或idle,且finished代表已执行完成、exe代表正在执行、idle代表挂起,sh表示在参考时刻下第m个线程的状态,sh的值为finished或exe或suspend,且finished代表已执行完成、exe代表正在执行、suspend代表挂起,ts表示时间戳,ts=(tin,tout),tin表示在参考时刻下第k个线程的运行启动时刻,tout表示在参考时刻下第k个线程的运行结束时刻,k=1,2,…,k,k表示从τ0到t期间被实例化的线程的数量。
18、所述步骤1.3中,快照日志数据是按照时间间隔w进行快照抽取得到的,其中,w=(t-τ0)/ε,t表示参考时刻,τ0表示智能无人系统软件的启动运行时刻,ε为设定的常数,ε的取值为用户根据深度神经网络学习模型需要的数据量来确定。
19、所述步骤2.1中,设定的延时时长为τ,τ=h×w,w=(t-τ0)/ε,h由用户自行设定。
20、所述步骤2.2中,利用best()函数从m+n个演化时机中获取最佳演化时机tbest的过程为:tbest=best(m,n)=equal(m,n)×α+rand(m,n)×β;其中,equal(m,n)用于判断计算出的m个演化时机和预测出的n个演化时机中是否有相同的演化时机,当有相同的1个或多个演化时机时随机返回相同的演化时机中的任意1个演化时机,当无相同的演化时机时返回空集,rand(m,n)用于从m+n个演化时机中随机返回1个演化时机,equal(m,n)不为空集时α取值1、β取值0,equal(m,n)为空集时α取值0、β取值1。
21、所述步骤2.2中,深度神经网络学习模型为递归神经网络、卷积神经网络、长短时记忆网络和注意力机制中的任意一种。
22、所述步骤3.1中,sa演化更新为sa'的演化规则为p:l→r,l在sa的匹配记为match:l∈sa,那么演化规则通过l在sa的匹配实施于sa上的一次变换过程表示为其中,l表示演化规则的左部,r表示演化规则的右部,l→r表示用r替换l。
23、与现有技术相比,本发明的优点在于:
24、(1)本发明方法以具有完备性的相离、相交、非正切、相等和逆非正切共5种位置空间元拓扑关系为基础,提出一种“图差”检测驱动的位置变化感知模型,解决了智能无人系统软件的位置变化难以自主感知的问题。
25、(2)本发明方法根据智能无人系统软件体系结构的当前状态模型和智能无人系统的在线动态运行模型,并利用关联矩阵模型,计算出多个演化时机;使用智能无人系统的在线动态运行模型和在线动态运行日志数据,对深度神经网络学习模型进行训练和学习,预测出多个演化时机;然后从计算出的多个演化时机和预测出的多个演化时机中评估出一个最佳演化时机。这种获取最佳演化时机的方式,相比较于仅从计算维度选择一个最佳演化时机,计算和预测同时支撑的演化时机选择性更多,以及所获得的最佳演化时机的安全性更好、及时性更高、干扰性更小,为智能无人系统软件在线更新演化提供了安全可靠的演化时机。
26、(3)本发明方法使用了线程级的中断栈保护机制,保证智能无人系统软件体系结构中的功能构件进行在线更新时,线程涉及到的更新功能构件实例能从老功能构件实例中正确地迁移到新功能构件实例上,保证了全天候智能无人系统软件不停机地安全可靠的在线更新。
- 还没有人留言评论。精彩留言会获得点赞!