基于Attention-UNet语义分割的隧道照明环境高效评价方法与流程
本发明属于隧道照明,具体涉及一种基于attention-unet语义分割的隧道照明环境高效评价方法。
背景技术:
1、隧道环境相对封闭,其亮度相对于正常路段偏低。故隧道需要借助于人工照明为驾驶员提供合适的视觉光亮条件。隧道内的照明系统需要能够满足驾驶员所适应的最佳光亮需求,以保证交通安全,降低交通事故发生率。国家相关标准规范规定大于100米隧道应该设置照明。隧道长期全天候不间断照明会加剧灯具老化,加之汽车尾气、灯具表面积灰等原因使得照明效果大打折扣,故定期对隧道照明进行检测尤为重要。当前隧道亮度检测方式效率低下,若完成全部测量任务,工作量巨大,故使用高效测量设备、测量方式或得出亮度检测的最优控量迫在眉睫。
技术实现思路
1、针对上述背景技术介绍中存在的问题,本发明的目的在于提供了一种提高了亮度检测效率、光亮度响应一致性好的基于attention-unet语义分割的隧道照明环境高效评价方法。
2、本发明采用的技术方案是:
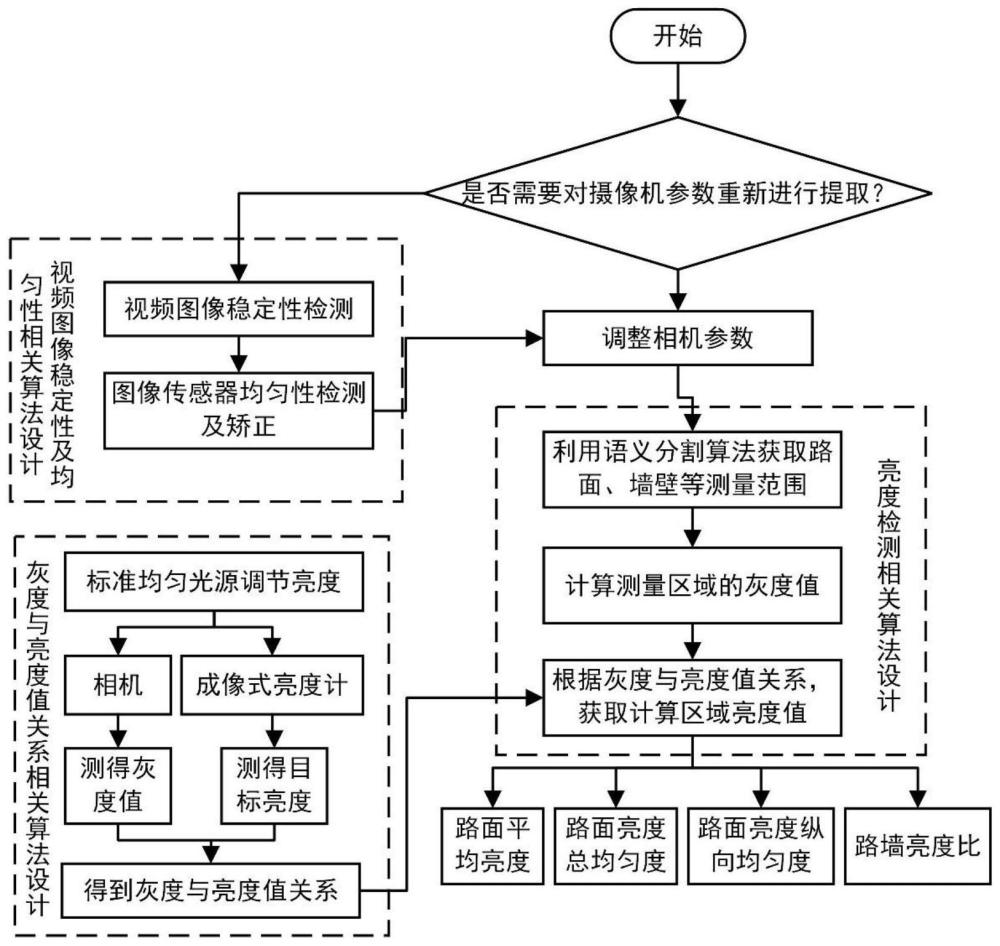
3、一种基于attention-unet语义分割的隧道照明环境高效评价方法,其具体步骤如下:
4、s1,隧道内的视频摄像机对隧道内路面、墙壁图像进行采集;
5、s2,利用attention-unet语义分割算法对路面、墙壁图像进行分割获取路面、墙壁的测量区域;
6、s3,对测量区域的灰度值进行计算,获取路面、墙壁的灰度值;
7、s4,根据灰度值与亮度值的关系,获取测量区域的路面、墙壁的亮度值;
8、s5,通过步骤s4获得的路面、墙壁的亮度值计算得到路面平均亮度、路面亮度总均匀度、路面亮度纵向均匀度、路墙亮度比,根据路面平均亮度、路面亮度总均匀度、路面亮度纵向均匀度、路墙亮度比来评价隧道的照明质量。
9、进一步,步骤s1中视频摄像机通过车载稳定支架安装在车辆引擎盖上,降低车辆震动对摄像摄像机图像质量的影响。
10、进一步,所述视频摄像机的镜头的高度范围为1-2米,镜头轴线与路面的夹角范围为0.5-5°。
11、进一步,步骤s1前还包括步骤s0,对隧道内的视频摄像机采集的视频图像稳定性以及感光元件的感光一致性进行检测,校正调确定整视频摄像机的参数。
12、进一步,步骤s0中视频图像稳定性检测具体如下:
13、每隔1分钟对恒定检测区域r、g、b的值进行统计,也就是每隔1500帧视频图像,一共求取二十组数据,然后利用均方差来分析数据分散程度;
14、既对r、g、b分别进行统计分析,同时又对其组成的整体进行分析,具体如公式(1)-(4)所示,
15、
16、
17、
18、
19、式中,n为测试的数据组数,ri、gi、bi分别为每个测试出的数据组中r、g、b的值,分别为测试出的n组r、g、b均值。
20、进一步,步骤s0中感光元件的感光一致性通过图像传感器均匀性检测及校正算法来处理,具体如下:
21、步骤s01,将视频摄像机拍摄的灰板图像分成多个子区域;
22、步骤s02,对每个子区域统计所得出的各图像亮度值进行统计,并画出横向、纵向两个方向对亮度值的折线图,观察其变化,判断是否均匀;
23、步骤s03,若系统均匀性较差,采取分块均匀性校正方法进行校正。
24、进一步,步骤s03中分块均匀性校正方法包括:
25、step 1,选取灰板图中的灰度值r1至r9,将其相加,并获取平均值如公式(5)所示,
26、
27、step 2:每个区域的亮度值为r(i,j),每个区域对应的校正系数为k(i,j),如公式(6)所示,
28、
29、进一步,步骤s2中attention-unet语义分割算法是以u-net网络模型为基础框架,在unet网络编码区和解码区相邻的卷积层中加入改进的残差模块,并在跳跃连接阶段嵌入卷积注意力机制;其中改进的残差模块的激活函数为mish函数;
30、卷积注意力机制的注意力机制模块通过最大池化和平均池化操作,压缩通道维度信息,生成两个二维映射特征图,将其进行拼接,然后通过卷积核大小为7*7的卷积运算,使用sigmoid来获取空间注意力特征图ms,则输出的特征图为fs,如公式(7)所示,
31、fs=f×ms(f)=f×σ(f7×7([maxpool(f);avgpool(f)])) (7)
32、式中,f7×7为大小为7×7的卷积运算,σ为sigmoid函数,maxpool(f)和avgpool(f)分别为最大池化和平均池化。
33、进一步,步骤s4中灰度值与亮度值的关系,具体如下:
34、对于同一个目标区域,建立成像式亮度计亮度值与视频摄像机灰度值之间的函数关系,如公式(8)所示,
35、li=f(ri) (8)
36、式中:li是某一亮度等级下目标区域的亮度值;
37、ri为某一亮度等级下目标区域的灰度值。
38、进一步,步骤s5中路面平均亮度、路面亮度总均匀度、路面亮度纵向均匀度、路墙亮度比的具体计算如下:
39、路面平均亮度,是指各照明段范围内全路面所有计算点亮度的算术平均值,如公式(9)所示,
40、
41、式中,lav表示路面平均亮度,li表示图像中路面的每个像素点的亮度,n表示路面像素点的个数;
42、路面亮度总均匀度,各照明段路面最小亮度和平均亮度的比值,如公式(10)所示,
43、
44、式中,u0表示路面亮度总均匀度,lav表示路面平均亮度,lmin表示图像中路面像素点的亮度最小值;
45、路面中线亮度纵向均匀度,沿路面中线上的最小亮度和最大亮度之比,如公式(11)所示,
46、
47、式中,ul表示路面中线亮度纵向均匀度,lmin表示图像中路面像素点的亮度最小值,lmax表示图像中路面像素点的亮度最大值;
48、路墙亮度比,如公式(12)所示,
49、
50、式中,表示路面与墙壁亮度比,表示图像中墙壁平均亮度,lav表示路面平均亮度。
51、本发明与现有技术相比,其显著优点包括:
52、1、在语义分割框架的基础上,引入注意力机制,通过网络学习为特征的不同空间位置或通道分配不同的权重,能够获取更具分辨性的特征表示,从而更好确定图像的目标区域;attention-unet算法以u-net网络模型为基础框架,加入改进的残差模块,缓解梯度消失问题,防止随着网络层数增加而产生的性能退化问题,并嵌入卷积注意力机制加强对路面和墙壁细节特征的深度表征能力,抑制非目标信息。
53、2、视频摄像机使用前先进行视频图像稳定性及感光一致性的检测,确保采集的视频图像的可靠性,利用视频摄像机能够快速采集图像的特征。
54、3、利用亮度与灰度之间的对应关系获得隧道路面及墙壁的亮度,快速评估隧道照明质量,提高了亮度检测效率。
- 还没有人留言评论。精彩留言会获得点赞!