一种融合动力学方程的轴承故障自动诊断方法
本发明涉及轴承故障检测领域,具体涉及一种融合动力学方程的轴承故障自动诊断方法。
背景技术:
1、滚动轴承作为旋转机械设备中使用广泛且容易损坏的部件,对其进行故障诊断具有重要的理论和实际意义。
2、传统的故障诊断方法需要在使用分类模型对信号所属故障类型进行分类前,进行特征提取;例如使用统计学方法、傅里叶变换、小波变换等方法对信号提取信号特征抑或是神经网络直接进行特征提取。在完成特征提取后,将特征输入到分类模型中进行故障分类诊断。尽管传统的特征提取方法具有一定的理论支持性,但滚动轴承的振动信号具有非平稳、非线性、形式复杂等特性,单一的传统方法往往难以挖掘到深度的故障特征,需要经验丰富的工程师对不同的信号匹配其专属的故障特征,否则诊断系统容易出现故障误判,产生经济损失。基于神经网络的故障诊断方法适应性强,端到端诊断效果优异,但同时非常依赖大数据且缺乏可解释性。
3、目前,常用的故障诊断技术可以总结为以下几种:1)基于专家系统,根据故障机理特性实现诊断;2)基于信号特征提取方法,配合机器学习模型实现故障诊断;3)基于深度学习方法,实现端到端故障诊断。上述的信号故障诊断技术能有效的实现轴承故障诊断,但是均存在较多弊端。基于专家系统的故障诊断方法严重依赖特征工程师的信号处理技术和经验水平,需要根据不同设备采集到的信号的特点匹配专门的处理算法。基于机器学习和深度学习的故障诊断模式识别技术虽然需要大量数据训练模型来实现可靠的故障诊断,但由于不同设备、或是同一设备在不同工况下,产生的振动信号的形式都有所不同,基于某些工况数据训练得到的模型在不同的设备或工况下会出现性能不稳定的情况。因此,基于机器学习和深度学习的故障诊断模式识别技术往往需要大量的数据进行训练。实际工程中,由于故障设备往往需要立即停机,所以,大量的故障数据是难以获得的。
4、综上,诸如上述的故障诊断方法虽然能够实现有效的轴承故障诊断,但其要么非常依赖专家系统设计人员的故障诊断专业知识、技术、经验,要么需要大量的人工成本或者需要大量的数据成本用于训练机器学习方法。
技术实现思路
1、针对现有技术的不足,本发明的主要目的是提供一种融合动力学方程的轴承故障自动诊断方法,可在无需任何标签辅助的情况下进行无标记数据的自动故障分类。
2、为了实现上述主要目的,本发明提供了一种融合动力学方程的轴承故障自动诊断方法,其包括以下步骤:
3、(1)搭建具有在线网络和目标网络这两个平行网络的byoldis网络,利用随机参数设定在线网络和目标网络中的坐标编码器、投影器的网络参数以及在线网络中预测器的网络参数;
4、(2)搭建包含外圈、内圈和滚子三种故障类型候选项的动力学备选方程库θ,利用动力学备选方程库θ为byoldis网络提供约束;将动力学备选方程库θ与稀疏矩阵ξ相结合共同构成重构的故障轴承动力学方程组;
5、(3)采集诊断所需的振动加速度序列信号通过时间序列积分和积分趋势去除得到能够反映故障轴承的振动冲激响应的积分序列速度信号和位移信号x;
6、(4)通过交互信息法确定延迟坐标嵌入的延迟时间τ,在延迟时间τ确认后,由taken嵌入定理,根据延迟时间间隔和时序信号x、和进一步构建hanker矩阵h、hp;其中,h、输入byoldis网络的在线网络,hp作为正样本对输入byoldis的目标网络,进行训练;
7、(5)计算byoldis网络的损失函数,通过反向传播优化器更新在线网络的参数,并利用在线网络的参数通过滑动平均法更新目标网络的参数;
8、(6)在进行设定阈值的训练更新后,取稀疏矩阵权重最大的故障类型轴承故障动力学项作为诊断结果输出,完成输入振动信号的故障诊断分析。
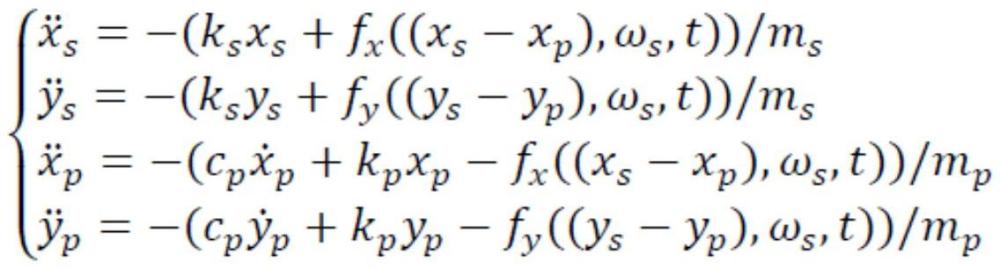
9、进一步地,在步骤(2)中利用四自由度故障轴承信号发生模型搭建动力学备选方程库θ,四个自由度xs、ys、xp和yp对应轴承和轴承座两个正交方向的位移;四自由度故障轴承信号发生模型的微分方程组表示如下:
10、
11、其中,方程fx(·,ωs,dt)、fy(·,ωs,dt)用于描述每个滚柱在接触位置处的接触力之和;kb为轴承座等效刚度,ks为轴承座等效刚度,cp为轴承座等效阻尼,ms为转轴等效质量,mp为轴承座等效质量;ωs为转轴旋转速度。
12、进一步地,在步骤(2)中,动力学备选方程库θ的候选项由坐标编码器的输出z和其导数计算得来;z=[z1,z2,z3,z4]分别对应四自由度故障轴承信号发生模型的四个自由度xs、ys、xp和yp;动力学备选方程库θ的外圈、内圈和滚子三种故障类型的接触力分别为fx-o、fy-o、fx-i、fy-i、fx-r、fy-r,得到动力学备选方程库θ的矩阵形式如下:
13、
14、其中,接触力计算使用hertz接触定理;
15、在动力学备选方程库θ后,结合稀疏矩阵ξ便可重构故障轴承的动力学微分方程
16、进一步地,步骤(1)中的坐标编码器由一个六层的全连接神经网络组成,投影层和预测层由输出维度相同的多层感知机(mlp)组成;其中,坐标编码器中最后一层神经网络的输出维度等于故障轴承微分方程的自由度。
17、进一步地,步骤(4)的训练过程包括以下步骤:
18、(4.1)h、输入到在线网络的坐标编码器中,生成代表转轴和轴承座两个正交方向的四个自由度信息z1,z2,z3,z4及其一阶导数和二阶导数hp输入目标网络的坐标编码器中;
19、(4.2)由z1,z2,z3,z4及其一阶导数得到外圈、内圈和滚子三种故障类型的接触力,从而得到本次正向传播过程中的动力学备选方程库θ;
20、(4.3)将步骤(4.2)所得到的动力学备选方程库θ与稀疏矩阵ξ相乘,构成本次正向传播过程中稀疏矩阵ξ参数构成的动力学微分方程组的显式解
21、(4.4)在线网络输出结果经过预测器得到gθ(pθ),目标网络输出结果经过梯度停止层得到sg(pξ)。
22、进一步地,步骤(5)的更新过程包括以下步骤:
23、(5.1)根据目标网络输出gθ(pθ)和在线网络输出sg(pξ)差异的二范数构建损失项l1,引导网络学习正样本对中的不变信息,帮助坐标编码器构造稳定的坐标映射;
24、(5.2)根据动力学备选方程库θ和稀疏矩阵ξ相乘得到的动力学微分方程组显式解和坐标编码器重构之间的差值的二范数构建损失项l2,为坐标编码器提供基于轴承故障动力学模型的约束;
25、(5.3)根据坐标编码器重构动力学备选方程库θ和稀疏矩阵ξ相乘得到的动力学微分方程组显式解与输入振动信号之间的差值的二范数构建损失项l3、l4,坐标编码器重构x1与输入振动信号的二阶积分位移信号x之间的差值的二范数构建损失项l5;
26、(5.4)将l1至l5相加得到最终的损失函数l6;通过反向传播梯度更新方法更新在线网络和稀疏矩阵ξ的参数,并利用滑动平均更新目标网络的参数。
27、进一步地,步骤(6)中的设定阈值为500次及以上。
28、进一步地,在步骤(6)中外圈、内圈和滚子三种故障类型接触力的参数之间符合softmax计算表达式,即外圈、内圈和滚子三种故障类型接触力的参数总和为1,选取最大权重项作为诊断结果输出。
29、本发明具备以下有益效果:
30、本发明通过提取故障轴承动态系统的控制微分方程来实现故障诊断,由于物理方程先验约束的加入,故不再如现有故障诊断算法一样需要大量数据进行训练;本发明利用时间延后坐标嵌入矩阵重构整个系统坐标并还原控制微分方程,从物理方程的角度实现了系统的近似还原,仅仅需要简易物理学特性建模,大大减少了对故障模型的专业知识的需求。
31、本发明的轴承故障自动诊断方法能够通过添加简易物理方程约束的方法减小神经网络对数据量的需求,避免常规方法所需的信号特征分析,实现有效的端到端故障诊断,既具有可解释性,又不依赖大量数据与人工成本。
32、为了更清楚地说明本发明的目的、技术方案和优点,下面结合附图和具体实施方式对本发明作进一步的详细说明。
- 还没有人留言评论。精彩留言会获得点赞!