推拼同步下基于推力均匀性的油缸推力分配算法及系统的制作方法
本发明属于盾构隧道施工技术和装置的,特别是涉及推拼同步下基于推力均匀性的油缸推力分配算法及系统。
背景技术:
1、常规盾构施工采用推拼交替模式,即先掘进一环管片的宽度后停机拼装管片,待整环管片拼装完毕后,再进行下一循环。常规推拼模式的推拼时间可划分为掘进时间和拼装时间,两者时间大体相当,从而导致拼装效率较低。
2、为了克服常规推拼模式掘进效率较低的问题,日本首先提出了“管片同步拼装施工”的理念,即掘进的同时进行管片的拼装,相较于常规拼装模式,推拼同步模式可以节省近一半的时间。近年来,随着一大批长大隧道的规划与修建,推拼同步的技术优势充分体现。推拼同步技术经过不断地改进发展,油缸推力矢量控制技术成为一种可实施的技术方案。
3、在推拼同步过程中,边掘进边拼装管片,部分油缸需要缩回,因此盾构推力的矢量控制技术是推拼同步系统的关键,即通过算法控制油缸收缩前后总推力的大小和方向不变。现有的推拼同步推力矢量控制技术主要有三种:一种方式是缩回一组油缸用于管片拼装,再缩回一组与之对称的油缸(也称为同调)以克服偏载,其余油缸增大推力以实现合力点和总推力不变;另一种方式是使得未缩回的油缸形成梯度化的推进力以补偿缩回油缸的推进力;第三种方式是使得各油缸推力的变化值最小。上述三种方法均会导致油缸的性能无法充分发挥。
技术实现思路
1、本发明为解决上述背景技术中的问题,提供了推拼同步下基于推力均匀性的油缸推力分配算法及系统。
2、本发明采用以下技术方案:推拼同步下基于推力均匀性的油缸推力分配算法,至少包括以下步骤:每环管片由若干管片分块组成,于盾体内配置多组推进油缸组;推进时,每个管片分块上至少支撑有一组油缸;构建基于管片分块的油缸分区等效模型,所述管片分块油缸分区等效模型为将支撑于同一管片分块上的所有油缸视为一个油缸分区,分区内油缸推力的合力大小为,等效半径为;建立油缸组推力的约束优化模型,所述约束优化模型的目标函数为使未缩回油缸推力的方差达到最小值,所述约束优化模型的约束条件包括:目标总推力大小约束函数、推力偏心量约束函数和油缸组推力范围约束函数;对所述约束优化模型采用优化算法得到各油缸分区的合力的最优解,基于合力的最优解得到所需的单根油缸推力。
3、在进一步的实施例中,根据需求设计和施工要求,每环管片由n块管片分块组成,每块管片分块j均配置有kj组油缸组,每组油缸组中含有根油缸;其中,k≥1,≥1,1≤j≤n;为管片分块j内油缸组kj中的油缸编号。
4、在进一步的实施例中,所述管片分块的油缸分区等效模型的构建流程如下:
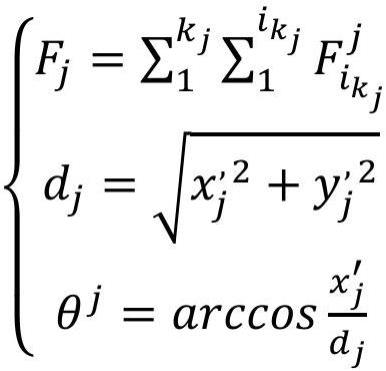
5、取n块管片分块中的任意一块,以管片的圆心为坐标系原点,以选定的管片分块的对称轴为轴,建立局部坐标系:通过等效公式(1)将管片分块j上的所有油缸组划分为同一分区,将同一分区内的油缸组进行等效为一根油缸;
6、 (1);
7、式中,为油缸组k中的油缸编号,表示管片分块中第k组油缸中编号为的油缸推力;为合力在管片分块的等效作用点的x轴坐标值,为合力在管片分块的等效作用点的y’轴坐标值,为合力的等效作用点与坐标原点的连线与ox’轴的夹角;
8、其中,所述x’轴坐标值的计算公式如下:;
9、y’轴坐标值的计算公式如下:;式中,表示油缸推力点到坐标系原点的距离,表示管片分块中第k组油缸中编号为的油缸推力点与坐标系原点的连线与坐标横轴的夹角。
10、在进一步的实施例中,还包括以下步骤:定义同一分区内的油缸推力相同,油缸在管片上沿对称轴对称分布,则所述等效公式(1)简化为:
11、;其中,为管片分块中任意一个油缸的推力;
12、对应的,的取值简化为0,的取值通过以下公式计算得到:
13、。
14、在进一步的实施例中,所述约束优化模型的目标函数具体如下:
15、式中,g为优化目标函数,即拼装时剩余n-1个管片分块对应等效油缸推力的方差;为剩余n-1个等效油缸的推力平均值,。
16、在进一步的实施例中,所述总推力大小约束函数如下:
17、,其中,为盾构掘进所需的目标总推力值;所述目标总推力值的计算公式如下:
18、,其中,为刀盘贯入阻力,为作用在刀盘面板上的地层侧向压力,为刀盘开口处的土仓压力,为盾构推进过程中盾壳与地层间的摩擦力,为后配套台车牵引力。
19、在进一步的实施例中,建立以管片的圆心为坐标系原点o,水平方向为x轴,竖直方向为y轴的整体坐标系oxy。所述推力偏心量约束函数包括:x轴方向偏心约束函数和y轴方向偏心约束函数。
20、所述x轴方向偏心约束函数表示为:
21、;其中,表示管片分块的油缸组的合力作用点与x轴坐标之间的夹角,表示对x轴的目标偏心距。
22、所述y轴方向偏心约束函数表示为:
23、;其中,表示对y轴的目标偏心距。
24、在进一步的实施例中,油缸组推力范围约束函数具体如下:
25、;其中,为保证安全拼装,第j根等效油缸所需最小推力,采用以下公式计算得到:
26、;其中gj表示第j块管片的自重,μ1为油缸撑靴与管片之间的摩擦系数;μ2为相邻两环管片之间的摩擦系数;为第j根等效油缸最大推力,采用以下公式计算得到:,其中,表示单根油缸的最大推力。
27、在进一步的实施例中,所述对x轴的目标偏心距的计算公式如下:
28、,其中mrx为绕x轴的纠偏力矩,其大小与围岩情况、盾构姿态有关。
29、所述对y轴的目标偏心距的计算公式如下:
30、,其中mry为绕y轴的纠偏力矩,其大小与围岩情况、盾构姿态有关。
31、推拼同步下基于推力均匀性的油缸推力分配系统,用于实现如上所述的分配算法;所述系统包括:设置在盾体内的硬件单元和连接于所述硬件单元的软件单元。
32、其中,所述硬件单元包括:若干油缸组,沿环向等间距分布在所述盾体内的油缸支撑架上;每组油缸由若干根油缸通过油缸撑靴联系在一起,所述油缸撑靴用于掘进时支撑在管片的横截面上。
33、在进一步的实施例中,所述油缸与油缸撑靴之间通过球铰铰接。
34、在进一步的实施例中,所述软件单元用于控制所述油缸组内单个油缸的推力大小,包括:
35、第一模块,根据管片分块,对盾构机油缸进行编号和分区,构建基于管片分块的油缸分区等效模型,所述管片分块油缸分区等效模型为将支撑于同一管片分块上的所有油缸视为一个油缸分区,分区内油缸推力的合力大小为,作用等效半径为。
36、第二模块,建立油缸组推力的约束优化模型,所述约束优化模型的目标函数为使未回缩油缸推力的方差达到最小值,所述约束优化模型的约束条件包括:目标总推力大小约束函数、推力偏心量约束函数和油缸组推力范围约束函数。
37、第三模块,根据设定的目标总推力值和目标偏心距,对所述约束优化模型采用优化算法得到合力的最优解,基于合力的最优解得到所需的单根油缸推力,并将推力分配给相应的油缸。
38、本发明的有益效果:本发明提出了一种基于管片分块的油缸分区的计算模型,即将作用在每块管片上的油缸视为一个油缸分区,每个分区的油缸推力大小相同和伸缩同步。本计算模型首先符合油缸分区独立控制的理念,同时可减少未知量的个数,提高了计算效率的同时不影响计算精度。
39、与此同时,在保证推力矢量相同的条件下,尽可能地使各油缸的推力均匀,增加了油缸的寿命。
- 还没有人留言评论。精彩留言会获得点赞!