一种掌静脉图像活体检测方法与流程
本发明涉及生物识别,尤其涉及一种掌静脉图像活体检测方法。
背景技术:
1、静脉识别技术是一种利用人体静脉灰度图像对个人身份进行识别的生物特征识别技术。静脉隐藏在人体内部,在日常活动下不会像指纹、人脸等留下痕迹,而且每个人每根手指的静脉纹路均不相同,因此可以作为身份识别的生物特征,并具有高安全、不易盗取等优势;随着静脉识别技术广泛的推广应用,其安全性接受着更加严峻的考验。但在其应用过程中,入侵者会利用自制设备采集原始手掌静脉灰度图像,然后在使用照片或者打印到假体上实现假体攻击。由此可见,对于本领域内的技术人员而言,如何实现静脉识别设备的活体检测功能,有效避免假体攻击,提高指静脉的使用安全性能是亟需解决的问题。
技术实现思路
1、本发明的主要目的是提供一种掌静脉图像活体检测方法,将其运用于掌静脉的生物识别中,能区分活体和非活体手掌,降低生物识别过程中的安全隐患。
2、为实现上述目的,本发明提供了一种掌静脉图像活体检测方法,包括以下步骤:
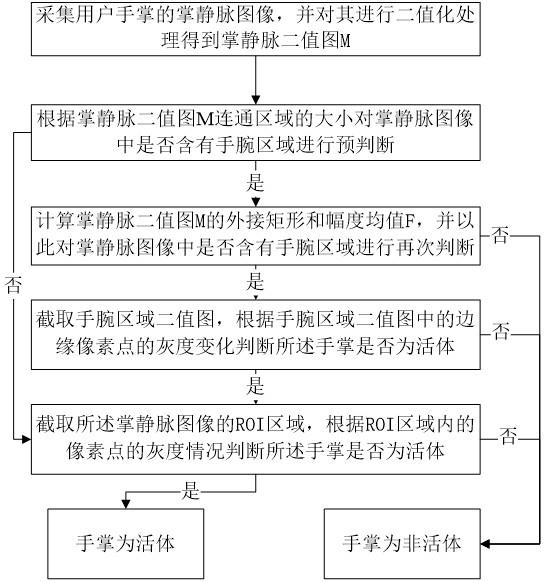
3、步骤1.采集用户手掌的掌静脉图像,并对其进行二值化处理得到掌静脉二值图m;
4、步骤2.获取掌静脉二值图m中的所有连通区域,根据连通区域的大小对掌静脉图像中是否含有手腕区域进行预判断,若含有手腕区域,进入步骤3,反之进入步骤5;
5、步骤3.通过边缘检测算法获取所述掌静脉二值图m的外接矩形,并计算所述掌静脉二值图m幅度均值f,根据所述外接矩形的大小和幅度均值f对所述掌静脉图像中是否含有手腕区域进行再次判断,若含有手腕区域,进入步骤4,反之所述手掌为非活体;
6、步骤4.截取所述掌静脉二值图m中的手腕区域二值图,根据手腕区域二值图中的边缘像素点的灰度变化判断所述手掌是否为活体,若为活体进入步骤5进一步判断,反之所述手掌为非活体;
7、步骤5.根据掌静脉二值图m截取所述掌静脉图像的roi区域,根据roi区域内的像素点的灰度变化及分布情况判断所述手掌是否为活体。
8、优选地,所述步骤2中根据连通区域的大小对掌静脉图像中是否含有手腕区域进行预判断包括:依次计算每个连通区域的面积,选取面积最大的连通区域为目标连通区域,若目标连通区域的面积小于等于阈值a,且目标连通区域的行数和列数均小于等于阈值b,则预判断掌静脉图像中含有手腕区域,反之不含有手腕区域。
9、优选地,所述步骤3中通过边缘检测算法获取所述掌静脉二值图m的外接矩形,并计算所述掌静脉二值图m幅度均值f,根据所述外接矩形的大小和幅度均值f对所述掌静脉图像中是否含有手腕区域进行再次判断包括:
10、步骤3.1.将边缘检测算子与掌静脉二值图m卷积获得掌静脉二值图m的边缘点,根据所述边缘点获取掌静脉二值图m的外接矩形,依次计算所述外接矩形上边界和下边界的距离c1、左边界和右边界的距离c2。
11、步骤3.2.计算所述掌静脉二值图m幅度均值f,所述幅度均值f为边缘检测算子与掌静脉二值图m的边缘点卷积的运算结果的平均值,计算公式为:
12、,
13、公式中,n为边缘点,i为边缘点的个数,gx为x方向的边缘检测算子,gy为y方向的边缘检测算子;
14、步骤3.3.若c1/c2>1.2,且c1>阈值c,且c2>阈值d,且10<f<30,则判断掌静脉图像中含有手腕区域,反之不含有手腕区域。
15、优选地,所述步骤4中截取所述掌静脉二值图m中的手腕区域二值图,根据手腕区域二值图中的边缘像素点的灰度变化判断所述手掌是否为活体包括:
16、步骤4.1.根据掌静脉二值图m定位手掌特征点,根据手掌特征点定位掌静脉二值图m的内接矩形;
17、步骤4.2.将内接矩形的下边界下移作为标线k,通过标线k获得手腕区域二值图,并根据手腕区域二值图确定掌静脉图像中的手腕区域;
18、步骤4.3.获取手腕区域中的目标曲线,所述目标曲线的长度大于10,且斜率平均值为-20~20;
19、步骤4.4.计算目标曲线的数量和紧密程度,并根据数量和紧密程度判断手掌是否为活体。
20、优选地, 所述步骤4.2中将内接矩形的下边界下移作为标线k包括:将内接矩形的下边界下移0.8个内接矩形的宽度作为初始标线k,若所述初始标线k超出了掌静脉二值图m的区域,则将内接矩形的下边界下移0.5个内接矩形的宽度作为标线k。
21、优选地,所述步骤4.2中所述手腕区域二值图为掌静脉二值图m中标线k以下的部分,所述手腕区域为手腕区域二值图在掌静脉图像中对应的部分。
22、优选地,所述步骤4.4中计算目标曲线的数量和紧密程度,并根据数量和紧密程度判断手掌是否为活体包括:
23、步骤4.4.1.统计目标曲线的数量s,若s<5,则进入步骤5,反之进入步骤4.4.2;
24、步骤4.4.2.构建目标曲线集群,所述目标曲线集群内任意两条目标曲线的起始点的距离在5像素以内,且长度差值在10像素以内,且斜率平均值的差值在10以内,并根据目标曲线集群内的目标曲线数量将目标曲线分为非常紧密、一般紧密、不紧密;
25、步骤4.4.3.若5≤s≤15,且目标曲线非常紧密或者目标曲线不紧密,或者若s>15则认定所述手掌为非活体,若5≤s≤15且目标曲线一般紧密,则进入步骤5。
26、优选地,若目标曲线集群内目标曲线的数量大于3,则认为目标曲线非常紧密,若目标曲线集群内目标曲线的数量大于1小于等于3,则认为目标曲线一般紧密,反之则认为目标曲线不紧密。
27、优选地,所述步骤5中根据掌静脉二值图m截取所述掌静脉图像的roi区域,根据roi区域内的像素点的灰度变化及分布情况判断所述手掌是否为活体包括:
28、步骤5.1.根据掌静脉二值图m截取所述掌静脉图像的roi区域;
29、步骤5.2.获取roi区域内灰度变化剧烈的像素点,所述灰度变化剧烈的像素点为与其8邻域内像素点灰度值的差值绝对值的平均值大于90的像素点;
30、步骤5.3.将所述灰度变化剧烈的像素点按照行列坐标进行排序,构成数组b,计算数组b中相邻像素点的距离,并统计每个距离的个数;
31、步骤5.4.若灰度变化剧烈的像素点的数量大于10且数组b中相邻像素点的最小距离大于2且最小的3个距离中任一距离的个数大于5,则判断所述手掌为非活体,反之所述手掌为为活体。
32、优选地,所述步骤5.3将所述灰度变化剧烈的像素点按照行列坐标进行排序为将所述灰度变化剧烈的像素点按照行坐标进行排序,若两个灰度变化剧烈的像素点行坐标相同,则按照其列坐标进行排序。
33、与现有技术相比,本发明具有以下技术效果:
34、本发明涉及的掌静脉图像活体检测方法基于手掌放置远近不同,通过将掌静脉图像划分为包含手腕区域的掌静脉图像和不包含手腕区域的掌静脉图像,对于包含手腕区域的掌静脉图像首先根据手腕区域像素点的灰度变化对手掌是否为活体进行判断,然后通过掌静脉图像的roi区域的像素点的灰度变化情况对手掌是否为活体进行判断,运用于手掌生物识别技术中,将非真实手掌剔除,仅对真实手掌图像进行识别,降低生物识别过程中的安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!