一种煤矿用空间扫描分析软件系统及方法与流程
本发明涉及煤矿,尤其是指一种煤矿用空间扫描分析软件系统及方法。
背景技术:
1、图像测量,就是把测量对象图像当作检测和传递信息的手段或载体加以利用的精确测量技术,它通过对于获得的二维图像进行处理和分析,得到需要的三维场景的信息,最终实现测量的目的;目前视频图像的测量理论还没有通用的方法和算法,针对不同测量对象和条件,要研究不同的实用方法和算法。空间扫描,即通过发射物理波(包括声波、光波、电磁波等)到环境空间并通过反射回的波形来探测环境空间轮廓的技术,常见的空间扫描技术包括声呐雷达、毫米波雷达、激光雷达等,根据具体使用的物理波的不同所能达到的探测精度与分辨率也不同。多源数据融合技术指利用相关手段将调查、分析获取到的所有信息全部综合到一起对信息进行统一的评价;感知问题上,单一的传感器总是有一定的不足,就像我们人一样,需要用耳、鼻、眼、四肢等多“传感器”协作(融合)来探索和感知世界,这就是最通俗的“多元融合”解释;常见的信号源主要有:毫米波雷达、超声波、摄像头、激光、gps、里程计、惯导等等。边缘计算,是指在靠近物或数据源头的一侧,采用网络、计算、存储、应用核心能力为一体的开放平台,就近提供最近端服务;其应用程序在边缘侧发起,产生更快的网络服务响应,满足行业在实时业务、应用智能、安全与隐私保护等方面的基本需求。
2、《一种数据融合及深度学习的刮板链条预警系统和检测方法》(专利申请号202210229076.6)。该发明提供了一种数据融合及深度学习的刮板链条预警系统和检测方法,包括链条检测装置和上位机,所述链条检测装置安装于刮板机的机尾,所述链条检测装置包括防爆箱体和设于防爆箱体中的激光3d轮廓相机,所述防爆箱体的可视面设置为透明防爆玻璃,所述激光3d轮廓相机通过透明防爆玻璃对刮板机机尾处的链条进行扫描取景,所述防爆箱体上设置有针对透明防爆玻璃的雨刷结构,所述上位机通过控制线路连接激光3d轮廓相机和所述雨刷结构的控制端。该系统和检测方法在井下实时检测,及时预警,精准定位。
3、然而,上述发明数据来源单一,仅通过点云分析;软件架构没有做专门的数据采集单元驱动分层,一旦切换传感器硬件则需要修改整个系统软件;数据无时间戳,无法适应时间敏感的应用需求;深度学习方法依赖于大量的数据学习,且对运行资源消耗巨大,难以运行在算力有限的硬件平台上;应用数量与种类固定,不具备可扩展性。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中数据来源单一、成本高、可修改性可扩展性差和无法适应时间敏感应用需求的问题。
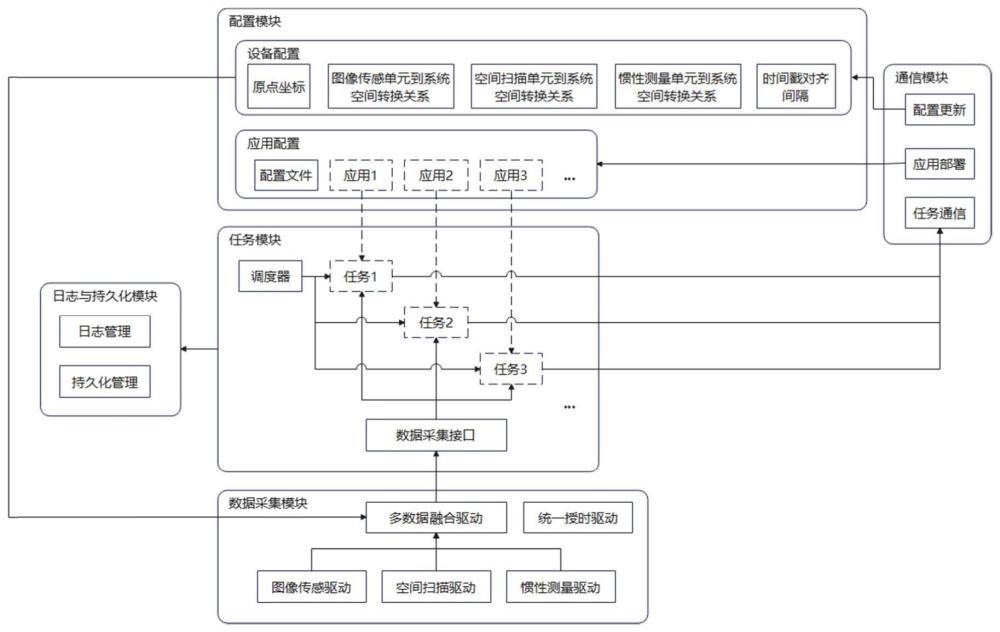
2、为解决上述技术问题,本发明提供了一种煤矿用空间扫描分析软件系统,包括:
3、配置模块;
4、通信模块,用于向所述配置模块写入设备配置信息和向系统部署任务应用可执行文件及支持所述任务应用在运行时与第三方系统通信;
5、数据采集模块,用于从所述配置模块中读取所述设备配置信息,根据所述设备配置信息建立具有时间戳的数据流并从所述数据流中读取数据进行时间与空间对齐;
6、任务模块,用于从所述配置模块中读取所述任务应用可执行文件和所述配置文件,从所述数据采集模块中获取所述数据、并根据所述配置文件启动各项任务应用,根据所述数据执行各项任务应用;
7、日志与持久化模块,用于为各项任务应用提供读写日志及其余文件的服务。
8、优选地,所述配置模块包括:
9、设备配置功能,用于存储系统原点坐标、图像传感单元到系统空间转换关系、空间扫描单元到系统空间转换关系、惯性测量单元到系统空间转换关系和时间戳对齐间隔;
10、应用配置功能,用于存储配置文件与各个任务应用的可执行文件。
11、优选地,所述数据采集模块包括:
12、统一授时驱动,用于为图像传感单元、空间扫描单元和惯性测量单元三种数据采集装置初始化时间;
13、图像传感驱动,用于所述启动图像传感单元,并根据所述设备配置信息建立具有时间戳的原始图像流;
14、空间扫描驱动,用于启动所述空间扫描单元,并根据所述设备配置信息建立具有时间戳的原始点云/深度图流;
15、惯性测量驱动,用于启动所述惯性测量单元,并根据所述设备配置信息建立具有时间戳的惯性数据流;
16、多数据融合驱动,用于:
17、从所述原始图像流读取具有时间戳的第一图像数据、从所述原始点云/深度流读取具有时间戳的第二图像数据、从所述原始惯性数据流读取具有时间戳的第三图像数据;
18、按照时间戳对齐间隔将间隔内的所述第一图像数据、所述第二图像数据和所述第三图像数据打包到同一时间切片内,然后依次按照图像传感单元到系统空间转换关系将本时间切片内第一图像数据转换到系统空间、按照空间扫描单元到系统空间转换关系将本时间切片内点第二图像数据转换到系统空间、按照惯性测量单元到系统空间转换关系将本时间切片内第三图像数据转换到系统空间,得到目标数据;
19、将所述目标数据发送到所述任务模块。
20、优选地,所述通信模块包括:
21、配置更新功能,用于为系统更新设备配置信息;
22、应用部署功能,用于为系统部署任务应用可执行文件并更新配置文件;
23、任务通信功能,用于建立各项任务应用与第三方系统的通信交互。
24、优选地,所述任务模块包括:
25、数据采集接口,用于从所述数据采集模块中读取数据;
26、调度器,用于根据所述配置文件启动任务实例并监督各项任务实例的执行状态,所述任务实例根据所述数据按照任务应用的代码进行计算和调用。
27、优选地,所述日志与持久化模块包括:
28、日志管理功能,用于为各项任务应用提供读写日志的服务;
29、持久化管理功能,用于为各项任务应用提供读写除日志外其余文件的服务。
30、本发明还提供了一种煤矿用空间扫描分析方法,包括:
31、获取设备配置信息和系统部署任务应用的可执行文件和配置文件;
32、根据所述设备配置信息建立具有时间戳的数据流并从所述数据流中读取数据进行时间与空间对齐;
33、根据所述配置文件启动各项任务应用,并根据所述数据执行各项任务应用;
34、根据所述任务应用读写日志。
35、优选地,所述设备配置信息包括系统原点坐标、图像传感单元到系统空间转换关系、空间扫描单元到系统空间转换关系、惯性测量单元到系统空间转换关系和时间戳对齐间隔。
36、优选地,所述根据所述设备配置信息建立具有时间戳的数据流并从所述数据流中读取数据包括:
37、初始化图像传感单元、空间扫描单元和惯性测量单元的时间;
38、利用图像传感单元,根据所述设备配置信息建立具有时间戳的原始图像流;
39、利用空间扫描驱动单元,根据所述设备配置信息建立具有时间戳的原始点云/深度图流;
40、利用惯性测量单元,根据所述设备配置信息建立具有时间戳的惯性数据流;
41、从原始图像流读取具有时间戳的第一图像数据、从原始点云/深度流读取具有时间戳的第二图像数据、从原始惯性数据流读取具有时间戳的第三图像数据;
42、按照时间戳对齐间隔将间隔内的第一图像数据、第二图像数据和第三图像数据打包到同一时间切片内,然后依次按照图像传感单元到系统空间转换关系将本时间切片内第一图像数据转换到系统空间、按照空间扫描单元到系统空间转换关系将本时间切片内点第二图像数据转换到系统空间、按照惯性测量单元到系统空间转换关系将本时间切片内第三图像数据转换到系统空间,得到目标数据。
43、优选地,所述根据所述配置文件启动各项任务应用,并根据所述数据执行各项任务应用包括;
44、根据所述配置文件启动任务实例并监督各项任务实例的执行状态,所述任务实例根据所述数据按照任务应用的代码进行计算和调用。
45、本发明的上述技术方案相比现有技术具有以下优点:
46、本发明所述的煤矿用空间扫描分析软件系统,具备应用数量与种类扩展的功能模块,且具备任务调度管理,边缘计算的功能能够根据应用场景需要定制与部署;本发明方法涉及的所有数据都有时间戳,能够用于时间敏感的应用;本发明的的分析方法依赖于具体应用的实现,包括但不限于深度学习、几何分析等,本发明的应用不依赖于深度学习方法,能够应用于性能较低的边缘计算场景;本发明能够集成图像采集单元、空间扫描单元、惯性测量单元三种数据采集装置,为后续数据分析应用提供更全面的信息来源;本发明在数据处理层将驱动分开,可广泛适配不同类型的传感元器件。
- 还没有人留言评论。精彩留言会获得点赞!