多类别建筑轮廓智能提取与规则化方法、应用系统与流程
【】本发明属于光学遥感技术应用领域,具体涉及多类别建筑轮廓智能提取与规则化方法、引用系统。
背景技术
0、
背景技术:
1、遥感建筑物影像作为gis的一部分,为城市规划、土地利用、环境监测、农业开发等方面提供基础数据,大大提高了数据的准确度和时效性,建筑物轮廓的精确提取是遥感建筑物影像满足目前的业务、应用需求的重要任务。
2、传统的方法通常是人工标注或者半自动提取,这种方法工作量大、耗时长,并且对于复杂度较高的建筑物难以处理。另外,传统方法往往难以解决不规则边界、遮挡、噪声等问题,导致提取结果的准确性存在差异。随着遥感技术的发展,遥感图像的分辨率的不断提升,深度学习全卷积神经网络模型可以通过端到端的训练机制,自动学习建筑物特征,高精度提取影像中的建筑物区域。但深度学习模型提取的建筑物栅格图像会出现建筑物识别不完整或过多识别,并且转换成矢量存在轮廓锯齿现象。
3、针对上述问题,本发明提供一种多类别建筑轮廓智能提取与规则化方法、应用系统。
技术实现思路
0、
技术实现要素:
1、针对上述问题,本发明提供多类别建筑轮廓智能提取与规则化方法、系统,可完整识别建筑物,且提取出的图像不会出现轮廓锯齿现象,大大提高了图像分类速度和精度,可满足多分类建筑物识别方面的应用。
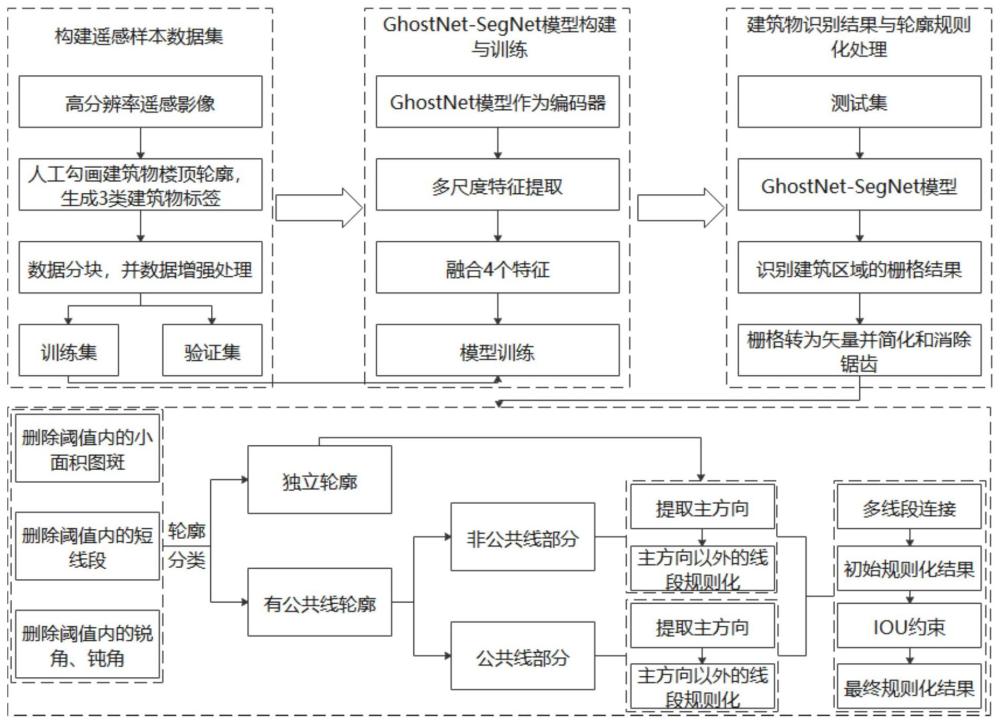
2、本发明是通过以下技术方案实现的,提供多类别建筑轮廓智能提取与规则化方法、系统,包括以下步骤:
3、s1构建三类遥感建筑样本数据集,并对每一张遥感图像进行逐像素标注样本标签;
4、s2构建并训练ghostnet-segnet模型用于遥感图像建筑物提取,其具体按照以下方案实施:
5、s21对segnet模型进行改进,构建ghostnet-segnet模型;
6、s22将s1中的训练集输入s21中的ghostnet-segnet模型进行模型训练,随后将验证集输入至ghostnet-segnet模型中进行精度验证,通过参数调优,选择精度好且稳定的模型参数,得到训练完毕的ghostnet-segnet模型;
7、s23将s22训练好的ghostnet-segnet参数应用在测试集上进行特征提取,并通过softmax分类器进行分类,得到栅格图像结果。
8、s3将训练完毕的ghostnet-segnet模型应用在测试集上进行特征提取,以得到对应的建筑物区域的栅格图像,随后将栅格图像的建筑物区域转换为矢量格式的图像;
9、s4将建筑物矢量轮廓进行规则化处理,其具体按照以下方案实施:
10、s41对矢量格式的图像进行简化处理,删除每个建筑物轮廓中多余的点,在不影响轮廓大致形状的同时减少处理时所需的计算机内存;
11、s42对简化后的矢量格式的图像进行粗修正,删除小面积轮廓、每个轮廓中存在的短线段以及超过阈值的锐角和钝角;
12、s43将建筑物轮廓进行分类和对单个建筑物轮廓进行拆分,对不同类的建筑物进行单独的规则化处理;
13、s44基于主方向的建筑物规则化方法对建筑物轮廓进行规则化;
14、s45对规则化后的单个建筑物轮廓加入交并比约束,进一步提高轮廓规则化的精度。
15、特别的,所述s1具体按照以下方案实施:
16、s11获取多幅分辨率优于0.5米的高分辨率遥感图像;
17、s12对每一幅影像的建筑物区域进行人工勾画建筑物楼顶轮廓,勾画完成后生成三类别多种建筑物类型的标签图像;
18、s13将建筑物数据集划分为训练集、验证集和测试集,其中训练集和验证集是将图像和标签统一分块为512×512的图像,测试集为整幅图像不做分块处理;
19、s14将建筑物数据集的训练集进行数据增强处理,其中数据增强处理的操作包括水平翻转、垂直翻转、随即旋转,从而得到建筑物训练样本数据集。
20、特别的,所述s2中构建并训练的ghostnet-segnet模型的具体实现过程如下:
21、所述segnet模型分为下采样特征提取和上采样映射两部分。其中下采样特征提取部分是针对segnet模型的编码器vgg16模型的参数多、计算量大,将轻量级模型ghostnet模型作为segnet模型的编码器,并取消了最后4层网络,随后增加多尺度特征模块,增强上下文信息的连接,并将模型命名为ghostnet-segnet模型。输入图像经过17层下采样特征提取得到160个16×16大小的特征图。随后将第17层卷积得到的160个16×16大小的特征图输出到上采样映射部分。经过18层上采样映射得到64个512×512大小的特征图。上采样映射部分通过上采样和卷积恢复至与输入时的遥感图像尺寸大小。最后用softmax分类器将解码器输出的特征图采样为4个通道进行分类,得到分类结果,并将分类结果转换为矢量格式。
22、特别的,所述s4具体按照以下方案实施:
23、s41对建筑物矢量轮廓基于ramer-douglas-peukcer算法进行简化处理,并保持相邻轮廓之间的拓扑关系,该处理能有效消除矢量轮廓的锯齿现象。
24、s42对简化后的轮廓进行粗修正,粗修正主要包括:删除阈值δ内的小面积图斑;删除阈值ε内的短线段;删除阈值α内的锐角、阈值β内的钝角。
25、s43将所有建筑物轮廓分为两类:第一类为与其他轮廓存在公共线的轮廓,第二类为任意轮廓与其他轮廓均不存在公共线的独立轮廓。对这两类建筑物轮廓进行分开处理,对于第一类轮廓,将这类轮廓分为两个部分即公共线部分和非公共线部分,对这两个部分分开规则化处理。此外,对于第二类轮廓,也将单独规则化处理。
26、s44对建筑物进行规则化处理,主要步骤包括:
27、s441选取初始主方向,在进行轮廓的简化和粗修正之后,计算出剩下的轮廓边的长度,最长的边作为建筑物初始主方向。
28、s442选取其他主方向,为了满足各种形状的建筑物,设置了多个主方向,即当除了初始主方向之外的其他轮廓边与初始主方向之间的夹角ρ∈[φ,45°-φ](φ为主方向角度阈值),并且轮廓边长l<td×s(td为轮廓边长与初始主方向比例阈值,s初始主方向的边长)作为第二、第三、…、第n主方向。
29、s443旋转轮廓边,计算除了主方向以外的轮廓边与①和②中获取到的每条主方向夹角,其中夹角的最小值ω对应的主方向为该轮廓边的最佳主方向。ω的取值范围和轮廓边的旋转情况对于不同面积建筑物有不同的需求,以下是本发明设置的默认范围:当ω∈[0,λ)或者ω∈(180°-λ,+∞)时,将该轮廓边旋转至与主方向平行;当ω∈[λ,λ+15°)或者ω∈(180°-(λ+15°),180°-λ]时,该轮廓边不进行旋转;当ω∈[λ+15°,90°)或者ω∈[90°,180°-(λ+15°)]时,将该轮廓边旋转至与主方向垂直。
30、s444获取所有轮廓边的交点,将所有交点连接起来得到最终的规则化轮廓。
31、s45对于较复杂的建筑物轮廓,应用固定的阈值,规则化后可能会出现过矫正的问题,针对此问题,考虑加入交并比约束u,本发明的交并比为规则化后的建筑物轮廓面积和简化与粗修正后规则化前的建筑物轮廓面积的交集和并集比。当规则化后的建筑物轮廓面积和简化与粗修正后规则化前的建筑物轮廓面积的交并比(记为iou)<u时,重新微调相关阈值,直到找到最合适的阈值满足iou≥u或者达到一定微调次数后取此时最高的iou后才能结束循环,最终可找到该轮廓合适的阈值。本发明设置的初始阈值为:面积阈值δ=20㎡,长度阈值ε=3.5m,锐角阈值α=35°,钝角阈值β=180°-α+30°,主方向的夹角阈值λ=45°/2,交并比约束u=0.9。
32、本发明提供多类别建筑轮廓智能提取与规则化方法、应用系统,该方法具有以下有益效果:
33、1.将segnet模型的编码层vgg16模型替换为ghostnet轻量级网络,并增加多尺度模块,共4个尺度,以增强上下文信息贯通,在满足快速识别的同时不会牺牲精度;
34、2.建筑物轮廓规则化是在将深度学习模型识别的栅格影像转化成矢量格式进行规则化处理,矢量格式的规则化处理效率快速;
35、3.规则化方法处理与其他轮廓存在公共线的轮廓时,充分考虑相邻轮廓间的拓扑关系,有效避免了规则化后相邻轮廓出现轮廓边相交的现象;
36、4.规则化方法中加入了交并比约束,使得本发明的规则化方法对复杂轮廓的建筑物也有很强的适用性。
- 还没有人留言评论。精彩留言会获得点赞!