基于3D仿生视觉目标探测与识别方法与流程
本发明涉及计算机视觉,具体是基于3d仿生视觉目标探测与识别方法。
背景技术:
1、基于3d仿生视觉的目标探测与识别方法是受生物视觉系统启发而设计的一种目标检测和识别技术。它模仿生物视觉系统中的眼睛和大脑处理信息的方式,通过对三维场景的感知和分析,实现对目标的探测和识别。
2、如何高效准确的提取所需要进行目标探测与识别的目标对象的表面特征,如何在提取到表面特征以后对后续的建模进行优化,并在建模之后对目标识别的鲁棒性进行提升,这些都是我们所需要考虑的问题。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供基于3d仿生视觉目标探测与识别方法。
2、本发明的目的可以通过以下技术方案实现:基于3d仿生视觉目标探测与识别方法,包括以下步骤:
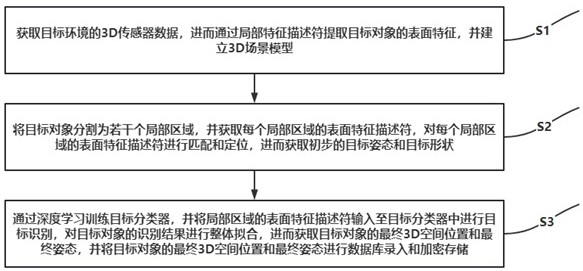
3、步骤s1:获取目标环境的3d传感器数据,进而通过局部特征描述符提取目标对象的表面特征,并建立3d场景模型;
4、步骤s2:将目标对象分割为若干个局部区域,并获取每个局部区域的表面特征描述符,对每个局部区域的表面特征描述符进行匹配和定位,进而获取初步的目标姿态和目标形状;
5、步骤s3:通过深度学习训练目标分类器,并将局部区域的表面特征描述符输入至目标分类器中进行目标识别,对目标对象的识别结果进行整体拟合,进而获取目标对象的最终3d空间位置和最终姿态,并将目标对象的最终3d空间位置和最终姿态进行数据库录入和加密存储。
6、进一步的,获取所述目标环境的3d传感器数据的过程包括:
7、选取目标环境,并在目标环境内布置不同类型的传感采集设备,进而通过不同类型的传感采集设备采集相应的3d传感器数据,3d传感器数据包括目标图像、深度图、纹理图以及雷达反射率,记雷达反射率为r,r∈(0,1),记雷达反射率的组数为i,则有i=1,2,3,……,n,其中n为大于0的自然数。
8、进一步的,通过所述局部特征描述符提取目标对象的表面特征,进而建立3d场景模型的过程包括:
9、局部特征描述符用于提取目标对象的表面特征,表面特征为目标对象的边缘特征数据,目标图像关联有对应的目标对象,通过局部特征描述符中的hog特征描述符获取目标对象的长度维度和宽度维度对应的梯度方向和梯度强度,预设有横向梯度强度区间与纵向梯度强度区间,进而获取相应的横向边缘信息和纵向边缘信息,合并生成目标对象的边缘特征数据,通过hog特征描述符对纹理图和深度图进行处理,进而获取对应的纹理信息和深度信息,以边缘特征数据、纹理信息和深度信息分别为第一建模参数、第二建模参数以及第三建模参数,进而构建出3d场景模型。
10、进一步的,将所述目标对象分割为若干个局部区域,并获取每个局部区域的表面特征描述符的过程包括:
11、将目标对象分割为若干个局部区域,获取每个局部区域的表面特征描述符,进而获取边缘特征数据包括的若干组梯度序列值,进而获取每组梯度序列值对应的一维向量(a,b,c),预设相应的维度区间,维度区间包括维度区间一、维度区间二以及维度区间三,分别记为wd1、wd2和wd3,若(a,b,c)∈wd1,则标记相应的局部区域对应维度区间一,若(a,b,c)∈wd2,则标记相应的局部区域对应维度区间二,若(a,b,c)∈wd3,则标记相应的局部区域对应维度区间三。
12、进一步的,根据每个所述局部区域的表面特征描述符进行匹配和定位,进而获取初步的目标姿态和目标形状的过程包括:
13、不同的维度区间有对应的姿态参数和形状参数,预设有目标姿态参数和目标形状参数存储于预设的匹配定位库内,将不同局部区域的表面特征描述符导入至匹配定位库,进而获取对应的区域参数一和区域参数二;所述区域参数一用于获取目标姿态,当姿态参数符合匹配定位库内的目标姿态参数时,赋予目标姿态参数对应的目标姿态为目标对象的初步的目标姿态;所述区域参数二用于获取目标形状,当形状参数符合匹配定位库内的目标形状参数时,赋予目标形状参数对应的目标形状为目标对象的初步的目标形状;若姿态参数和形状参数不符合相应的目标姿态参数和目标形状参数时,则不进行局部区域的匹配和定位。
14、进一步的,通过深度学习训练目标分类器,进而进行所述目标识别的过程包括:
15、设置目标分类器,获取目标对象对应的图像数据集,将图像数据集按照预设的比例划分为相应的训练集和测试集,将训练集输入至目标分类器中进行训练,获取训练频数,将测试集输入至目标分类器中进行测试,获取目标分类器对目标对象的识别情况,识别情况包括识别成功和识别失败,若识别成功,则为目标分类器标注一个正确标注符号,否则,标注一个错误标注符号,获取标注正确标注符号的次数,记为n1,获取标注错误标注符号的次数,记为n2,获取标注比,记为u,有u=n1/n2,预设停训阈值,记为d阈,若u≥d阈,则停止目标分类器的训练,否则,对训练频数num1进行增大,对训练集的占比进行提升,并继续训练目标分类器,直到u≥d阈停止训练;将目标对象所对应的表面特征描述符输入至训练完成的目标分类器中进行目标识别,进而获取若干个局部区域对应的空间相关信息,空间相关信息包括空间坐标、空间尺度以及空间投影。
16、进一步的,对所述目标对象的识别结果进行整体拟合,进而获取目标对象的最终3d空间位置和最终姿态的过程包括:
17、获取目标对象的识别结果所对应的空间相关信息,并分别标记空间相关信息中的空间坐标和空间尺度的数值为ψ1和ψ2,预设有坐标维度簇和空间尺度分类区间,分别记为τ1和τ2,获取空间投影,进而生成空间投影相应大小的映射空间,根据ψ1、ψ2、τ1以及τ2,进而整体拟合生成目标对象的最终3d空间位置以及最终姿态。
18、进一步的,将最终3d空间位置和最终姿态进行数据库录入和加密存储的过程包括:
19、预设数据库,获取数据库对应的读权限和写权限,进而通过读权限读取最终3d空间位置和最终姿态,并同步生成一个读取包,为读取包关联一个读取进度,读取进度有对应的进度数值,当进度数值为100%时,获取写权限,将读取包写入数据库,进而进行数据库录入;
20、对所录入的若干个数据包进行编号,设置加密时间区间和加密频数,进而构建每个数据包的加密规则,通过每个数据包对应的加密规则进行相应加密,进而生成每个数据包对应的加密数据包,并对加密数据包进行存储。
21、与现有技术相比,本发明的有益效果是:通过局部特征描述符提取目标对象的表面特征,提取的数据更加精细化,具有针对性,在3d场景建模的过程中综合考虑了目标图像的横向梯度和纵向梯度,两种维度的考量一定程度上提升了建模的精确度,通过表面特征描述符进行匹配和定位,进而生成初步的目标姿态和目标形状,并通过深度学习进行进一步的训练识别,使得目标识别的准确性得以提升,目标识别产生的最终3d空间位置和最终姿态在获取到数据库相应的权限后,进行数据包的读取和数据库写入,并设置加密时间区间和加密频数,进而形成不同的加密规则,一定程度上提升了数据的安全性。
- 还没有人留言评论。精彩留言会获得点赞!