一种双振镜的线动态激光系统的标定方法、设备
本发明属于计算机视觉、三维重建、视觉测量领域,具体涉及一种双振镜的线动态激光系统的标定方法、设备。
背景技术:
1、传统的线激光扫描仪主要依赖于机械驱动轴来驱动激光或者相机完成目标扫描,这些设备体积大、结构复杂且速度慢。近年来,振镜系统被用于作为激光的扫描机构,振镜包括一个基于振镜的扫描电机,配有光学镜和一个可以向系统发送反馈信号的探测器。它体积小,运动速度快,控制精度高,因此它可以为测量精度提供保证,很好的替代了原有的激光扫描机构。同时,振镜也可以用来作为相机视野的扫描机构,从而扩大测量范围。因此有学者提出了基于双振镜的激光扫描系统,包含基于振镜的动态激光系统和基于振镜的动态相机系统。要达到高精度的测量,对该系统的标定是关键,包括对基于振镜的动态激光系统标定、基于振镜的动态相机的标定和两者的联合标定。
2、对于基于振镜的动态激光系统,学者eisert提出了基于数学模型的标定流程,但模型复杂优化困难,因此标定精度低。学者yu提出了基于单轴振镜的扫描系统和它的标定方法,但是标定流程非常复杂。学者yang提出了基于高精度线性平台的标定方法,标定精度高,但是缺乏灵活性。
3、对于基于振镜的动态相机的标定方法,可以分为四类。第一种是自标定方法,该方法理论复杂且难以实施。第二种是查表法,但是需要很复杂的预标定。第三种是基于特征的标定方法,这类方法耗时且精度低。第四种是基于神经网络的方法,使用端到端的单隐藏层前馈神经网络模型,但这种方法在计算上很复杂。
4、综上现有的标定方法只专注于标定动态激光或动态相机,并且如上所述仍存在一些不足之处,且缺乏两者的联合标定。基于此,本发明提出了一种双振镜的线动态激光系统的标定方法。
技术实现思路
1、为了解决现有技术中的上述问题,即为了解决现有基于双振镜的线动态激光系统的标定方法鲁棒性较差的问题,本发明提供了一种双振镜的线动态激光系统的标定方法,应用于包括动态相机系统和动态激光系统的双振镜的线动态激光系统;所述动态相机系统包括相机与振镜1;所述动态激光系统包括激光器与振镜2;所述振镜1、所述振镜2均包括pan镜面、tilt镜面,该方法包括:
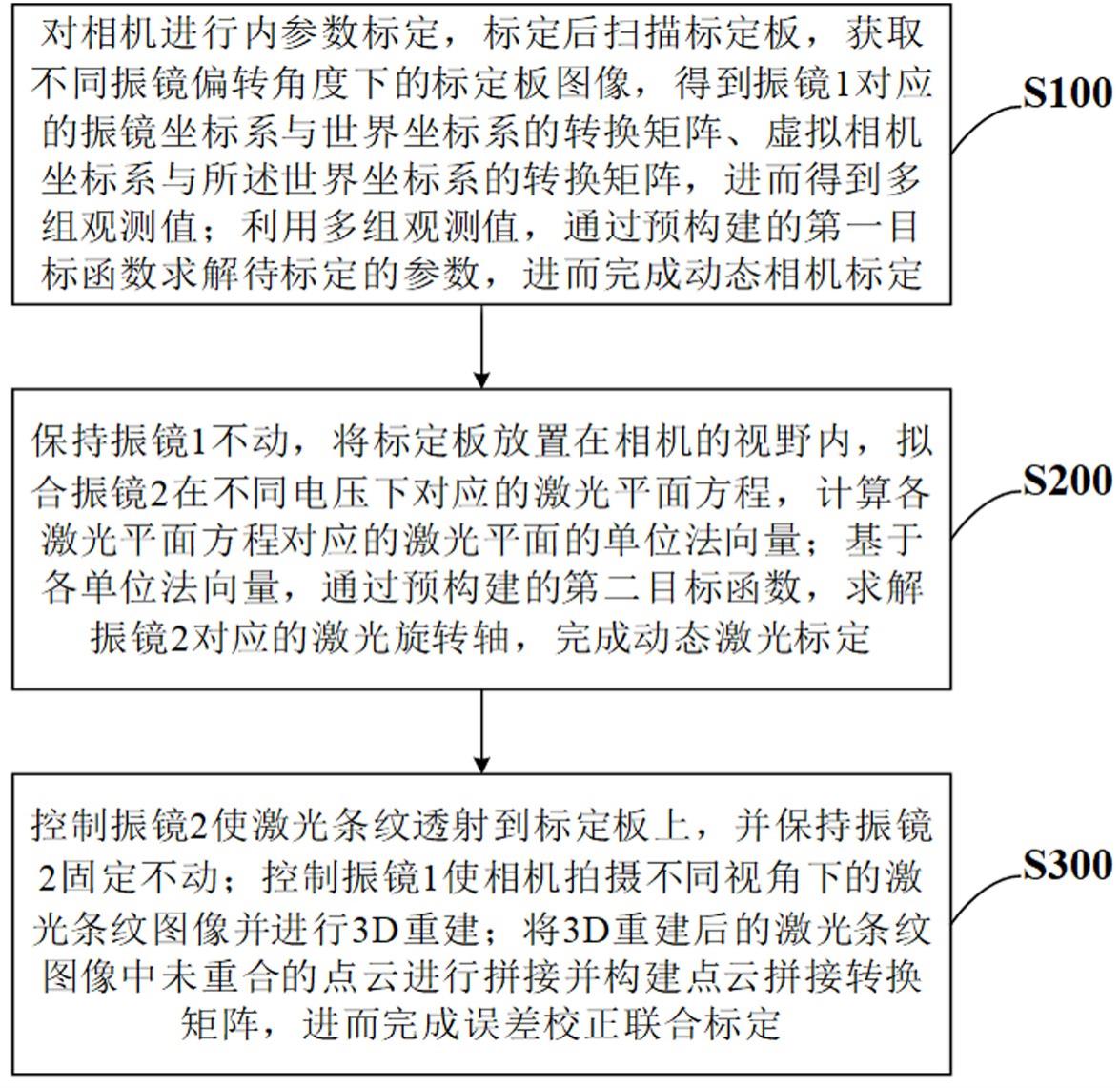
2、步骤s100,对所述相机进行内参数标定,标定后扫描标定板,获取不同振镜偏转角度下的标定板图像,得到所述振镜1对应的振镜坐标系与世界坐标系的转换矩阵、虚拟相机坐标系与所述世界坐标系的转换矩阵,进而得到多组观测值;所述观测值为旋转后每个虚拟相机坐标系与初始的虚拟相机坐标系之间的转换矩阵;
3、利用多组观测值,通过预构建的第一目标函数求解待标定的参数,进而完成动态相机标定;所述待标定的参数包括所述振镜1的pan镜面到所述振镜1的tilt镜面的距离、所述相机到所述振镜1的pan镜面的距离;
4、步骤s200,保持所述振镜1不动,将所述标定板放置在所述相机的视野内,拟合所述振镜2在不同电压下对应的激光平面方程,计算各激光平面方程对应的激光平面的单位法向量;基于各单位法向量,通过预构建的第二目标函数,求解所述振镜2对应的激光旋转轴,完成动态激光标定;
5、步骤s300,控制所述振镜2使激光条纹透射到所述标定板上,并保持所述振镜2固定不动;控制所述振镜1使所述相机拍摄不同视角下的激光条纹图像并进行3d重建;将3d重建后的激光条纹图像中未重合的点云进行拼接并构建点云拼接转换矩阵,进而完成误差校正联合标定。
6、在一些优选的实施方式中,利用多组观测值,通过预构建的第一目标函数求解待标定的参数,进而完成动态相机标定,其方法为:
7、获取第一约束关系与第二约束关系之间的变换矩阵,作为第一矩阵;所述第一约束关系为在所述振镜1的pan镜面、tilt镜面的初始角度下,所述虚拟相机坐标系与所述振镜1对应的振镜坐标系之间的约束关系;所述第二约束关系为采集所述标定板第n张图像时,在所述振镜1的pan镜面、tilt镜面的角度下,所述虚拟相机坐标系与所述振镜1对应的振镜坐标系之间的约束关系;
8、基于所述第一约束关系,结合所述第一矩阵,得到所述第二约束关系,作为观测约束关系;
9、计算各所述观测约束关系与其对应的振镜模型计算的第二约束关系之间的误差,进而基于所述误差构建第一目标函数;
10、结合所述第一约束关系、所述观测约束关系,通过最小二乘法对所述第一目标函数进行求解,得到所述相机到所述振镜1的pan镜面的距离、所述振镜1的pan镜面到所述振镜1的tilt镜面的距离,进而进行动态相机标定。
11、在一些优选的实施方式中,所述第一约束关系与所述第二约束关系之间的变化矩阵为:
12、
13、其中,表示{v0}和{vn}的变化矩阵,{v0}表示第一约束关系,{vn}表示第二约束关系,表示第n个变化矩阵中第 i行第 j列的元素,表示采集的标定板图像的数量。
14、在一些优选的实施方式中,所述观测约束关系为:
15、
16、其中,、分别表示振镜1的pan镜面、tilt镜面的初始角度,、表示相机到振镜1的pan镜面的距离、振镜1的pan镜面到振镜1的tilt镜面的距离,表示第一约束关系对应的约束函数,表示观测约束关系对应的约束函数。
17、在一些优选的实施方式中,所述振镜模型计算的第二约束关系为:
18、
19、其中,{v}表示振镜模型计算的第二约束关系,{g}表示基坐标系,表示{v}和{g}之间的旋转矩阵,、表示振镜1的pan镜面和tilt镜面的旋转角。
20、在一些优选的实施方式中,所述第一目标函数为:
21、
22、
23、其中,,表示第一目标函数,即待标定的参数、,表示振镜模型计算的第二约束关系对应的约束函数,、分别表示振镜1采集第n张标定板图像时的pan镜面、tilt镜面的角度。
24、在一些优选的实施方式中,所述第二目标函数为:
25、
26、其中,表示第二目标函数,即待标定振镜2对应的激光旋转轴,n=(nx,ny,nz),n表示激光旋转轴的方向向量,nx,ny,nz分别表示激光旋转轴的x、y、z方向向量,、、分别表示第i个激光平面的x、y、z方向向量的值,ni表示激光平面的单位法向量,表示激光平面的数量。
27、在一些优选的实施方式中,将3d重建后的激光条纹图像中未重合的点云进行拼接并构建点云拼接转换矩阵,进而完成误差校正联合标定,其方法为:
28、使用icp点云拼接算法,完成每一条激光点云的拼接,获取点云拼接转换矩阵,进而根据所述点云拼接转换矩阵,完成误差校正联合标定。
29、本发明的第二方面,提出了一种双振镜的线动态激光系统的标定设备,包括:至少一个处理器;以及与至少一个所述处理器通信连接的存储器;其中,所述存储器存储有可被所述处理器执行的指令,所述指令用于被所述处理器执行以实现上述的一种双振镜的线动态激光系统的标定方法。
30、本发明的有益效果:
31、本发明提升了现有基于双振镜的线动态激光系统的标定方法的鲁棒性。
32、本发明实现动态相机标定、动态激光标定和误差校正联合标定的全面标定,简单灵活,且取得了很高的标定精度。此外,本发明方法可推广用于单振镜的动态激光系统或者单振镜的动态相机系统的标定。
- 还没有人留言评论。精彩留言会获得点赞!