一种基于双目视觉和线激光的配仓刮板机断链检测方法与流程
本技术涉及刮板运输机,尤其涉及基于双目视觉和线激光的配仓刮板机断链检测方法。
背景技术:
1、随着煤矿机械化、自动化程度日益提高,刮板运输机已是煤矿必不可少的运输设备,在煤矿生产过程中发挥着重要的作用。刮板运输机链条断链是刮板运输机故障中最常见的故障,因其故障发生原因多样,断裂位置无法预判,工作环境条件恶劣,故障处理空间狭小且难度较高,直接制约矿井高产高效的生产需求,也严重地威胁着矿井安全生产与职工的人身安全。
技术实现思路
1、本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本技术的第一个目的在于提出一种基于双目视觉和线激光的配仓刮板机断链检测方法,解决了现有方法无法及时检测到断链故障,危害矿井正常运行的技术问题,实现了断链故障的准确检测。
3、本技术的第二个目的在于提出一种基于双目视觉和线激光的配仓刮板机断链检测装置。
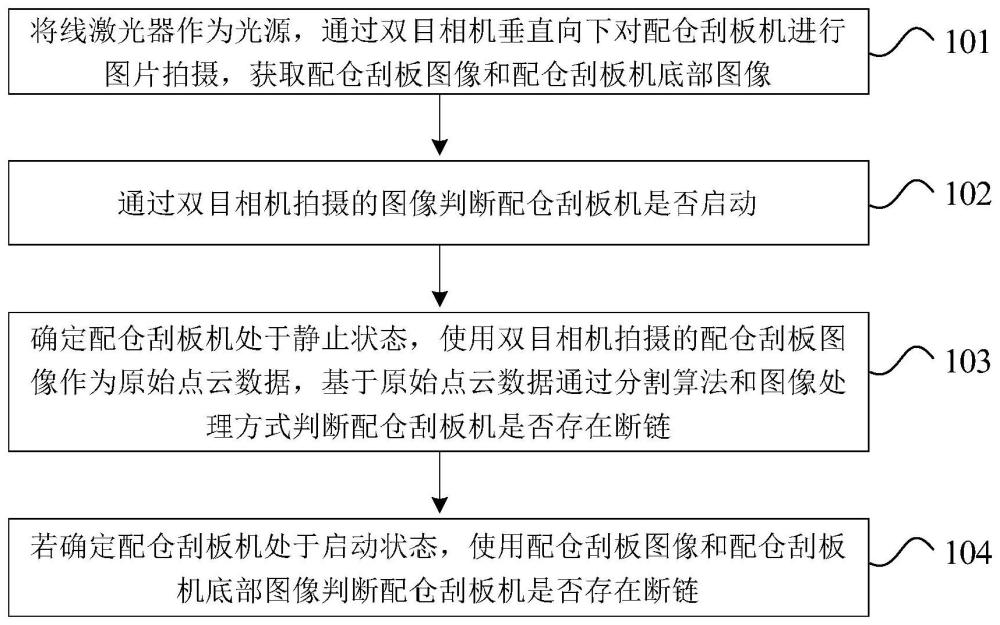
4、为达上述目的,本技术第一方面实施例提出了一种基于双目视觉和线激光的配仓刮板机断链检测方法,包括:将线激光器作为光源,通过双目相机垂直向下对配仓刮板机进行图片拍摄,获取配仓刮板图像和配仓刮板机底部图像;通过双目相机拍摄的图像判断配仓刮板机是否启动;若确定配仓刮板机处于静止状态,使用双目相机拍摄的配仓刮板图像作为原始点云数据,基于原始点云数据通过分割算法和图像处理方式判断配仓刮板机是否存在断链;若确定配仓刮板机处于启动状态,使用配仓刮板图像和配仓刮板机底部图像判断配仓刮板机是否存在断链。
5、本技术实施例的基于双目视觉和线激光的配仓刮板机断链检测方法,通过线激光器结合双目相机对配仓刮板机进行实时图像拍摄,基于拍摄的图像数据实现对配仓刮板机的实时断链故障检测,并及时的制定相应的预防措施,可以极大程度的减少断链次数,保证矿井的正常运行。
6、可选地,在本技术的一个实施例中,通过双目相机拍摄的图像判断配仓刮板机是否启动,包括:
7、基于双目相机拍摄出的配仓刮板图像和配仓刮板机底部图像计算双目相机到配仓刮板的第一距离和双目相机到配仓刮板机底部的第二距离;
8、若在一定时间内第一距离和第二距离交替出现且出现时间稳定,则确定配仓刮板机处于启动状态;
9、若在一定时间内第一距离和第二距离未交替出现或交替出现时间不稳定,则确定配仓刮板机处于运转至静止状态。
10、可选地,在本技术的一个实施例中,基于原始点云数据通过分割算法和图像处理方式判断配仓刮板机是否存在断链,包括:
11、通过投影方式将原始的三维点云数据映射成二维深度图像;
12、使用链条分割算法模型对二维深度图像进行像素级定位,确定链条的整体轮廓;
13、对二维深度图像的链条整体轮廓内外的像素值进行设定,将二维深度图像转换为二值图像;
14、采用腐蚀运算和膨胀运算对二值图像进行处理,得到处理后的二值图像;
15、采用canny算子提取处理后的二值图像的边缘信息,并确定边缘图像像素点坐标;
16、用边缘图像的多个图像边缘像素点在x轴方向拟合直线,若未拟合成功,判断配仓刮板机未出现断链,若拟合出两条直线,判断配仓刮板机出现断链。
17、可选地,在本技术的一个实施例中,使用配仓刮板图像和配仓刮板机底部图像判断配仓刮板机是否存在断链,包括:
18、若在一定时间内双目相机拍到配仓刮板图像后,未拍到新的刮板图像,则判断刮板后面出现刮板双链断裂;
19、若在一定时间内双目相机拍到配仓刮板机底部图像后,未拍到配仓刮板图像,则判断刮板前面出现刮板双链断裂。
20、可选地,在本技术的一个实施例中,使用配仓刮板图像和配仓刮板机底部图像判断配仓刮板机是否存在断链,还包括:
21、在双目相机拍到配仓刮板图像后,在一定时间内连续拍摄到配仓刮板图像和配仓刮板机图像,基于拍摄出的图像测量双目相机到配仓刮板及配仓刮板机底部的距离,得到配仓刮板图像对应的第一像素点数和配仓刮板机底部图像对应的第二像素点数的集合;
22、若集合中第一像素点数和对应的第二像素点数满足预设条件,则标记出配仓刮板对应的位置点,基于标记出的多个位置点生成直线;
23、基于生成的直线计算出配仓刮板倾斜夹角,若该夹角大于预设阈值,则判断配仓刮板单链断裂,若该夹角小于预设阈值,则判断配仓刮板出现斜链。
24、为达上述目的,本发明第二方面实施例提出了一种基于双目视觉和线激光的配仓刮板机断链检测装置,包括图像采集模块、第一判断模块、第二判断模块、第三判断模块,其中,
25、图像采集模块,用于将线激光器作为光源,通过双目相机垂直向下对配仓刮板机进行图片拍摄,获取配仓刮板图像和配仓刮板机底部图像;
26、第一判断模块,用于通过双目相机拍摄的图像判断配仓刮板机是否启动;
27、第二判断模块,用于若确定配仓刮板机处于静止状态,使用双目相机拍摄的配仓刮板图像作为原始点云数据,基于原始点云数据通过分割算法和图像处理方式判断配仓刮板机是否存在断链;
28、第三判断模块,用于若确定配仓刮板机处于启动状态,使用配仓刮板图像和配仓刮板机底部图像判断配仓刮板机是否存在断链。
29、可选地,在本技术的一个实施例中,通过双目相机拍摄的图像判断配仓刮板机是否启动,包括:
30、基于双目相机拍摄出的配仓刮板图像和配仓刮板机底部图像计算双目相机到配仓刮板的第一距离和双目相机到配仓刮板机底部的第二距离;
31、若在一定时间内第一距离和第二距离交替出现且出现时间稳定,则确定配仓刮板机处于启动状态;
32、若在一定时间内第一距离和第二距离未交替出现或交替出现时间不稳定,则确定配仓刮板机处于运转至静止状态。
33、可选地,在本技术的一个实施例中,基于原始点云数据通过分割算法和图像处理方式判断配仓刮板机是否存在断链,包括:
34、通过投影方式将原始的三维点云数据映射成二维深度图像;
35、使用链条分割算法模型对二维深度图像进行像素级定位,确定链条的整体轮廓;
36、对二维深度图像的链条整体轮廓内外的像素值进行设定,将二维深度图像转换为二值图像;
37、采用腐蚀运算和膨胀运算对二值图像进行处理,得到处理后的二值图像;
38、采用canny算子提取处理后的二值图像的边缘信息,并确定边缘图像像素点坐标;
39、用边缘图像的多个图像边缘像素点在x轴方向拟合直线,若未拟合成功,判断配仓刮板机未出现断链,若拟合出两条直线,判断配仓刮板机出现断链。
40、可选地,在本技术的一个实施例中,使用配仓刮板图像和配仓刮板机底部图像判断配仓刮板机是否存在断链,包括:
41、若在一定时间内双目相机拍到配仓刮板图像后,未拍到新的刮板图像,则判断此刮板后面出现刮板双链断裂;
42、若在一定时间内双目相机拍到配仓刮板机底部图像后,未拍到配仓刮板图像,则判断刮板前面出现刮板双链断裂。
43、可选地,在本技术的一个实施例中,使用配仓刮板图像和配仓刮板机底部图像判断配仓刮板机是否存在断链,还包括:
44、在双目相机拍到配仓刮板图像后,在一定时间内连续拍摄到配仓刮板图像和配仓刮板机图像,基于拍摄出的图像测量双目相机到配仓刮板及配仓刮板机底部的距离,得到配仓刮板图像对应的第一像素点数和配仓刮板机底部图像对应的第二像素点数的集合;
45、若集合中第一像素点数和对应的第二像素点数满足预设条件,则标记出配仓刮板对应的位置点,基于标记出的多个位置点生成直线;
46、基于生成的直线计算出配仓刮板倾斜夹角,若该夹角大于预设阈值,则判断配仓刮板单链断裂,若该夹角小于预设阈值,则判断配仓刮板出现斜链。
47、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!