点云缺陷检测方法和装置、电子设备及存储介质与流程
本技术涉及缺陷检测,尤其涉及一种点云缺陷检测方法和装置、电子设备及存储介质。
背景技术:
1、相关技术中,利用三维传感器对制造产品表面进行扫描得到三维点云数据。通过对三维点云数据进行缺陷检测,来确定制造产品表面的缺陷,从而实现对制造产品表面质量的监控。在扫描过程中,为了尽可能保留复杂制造产品表面的细节信息,得到的三维点云数据往往是非结构化的。而非结构化的三维点云数据无法表示为矩阵、张量等数据结构。如何对非结构化三维点云数据表示下的制造产品表面进行缺陷检测,成为了亟待解决的问题。
技术实现思路
1、本技术实施例的主要目的在于提出一种点云缺陷检测方法和装置、电子设备及存储介质,旨在对非结构化三维点云数据表示下的制造产品表面进行缺陷检测。
2、为实现上述目的,本技术实施例的第一方面提出了一种点云缺陷检测方法,所述方法包括:
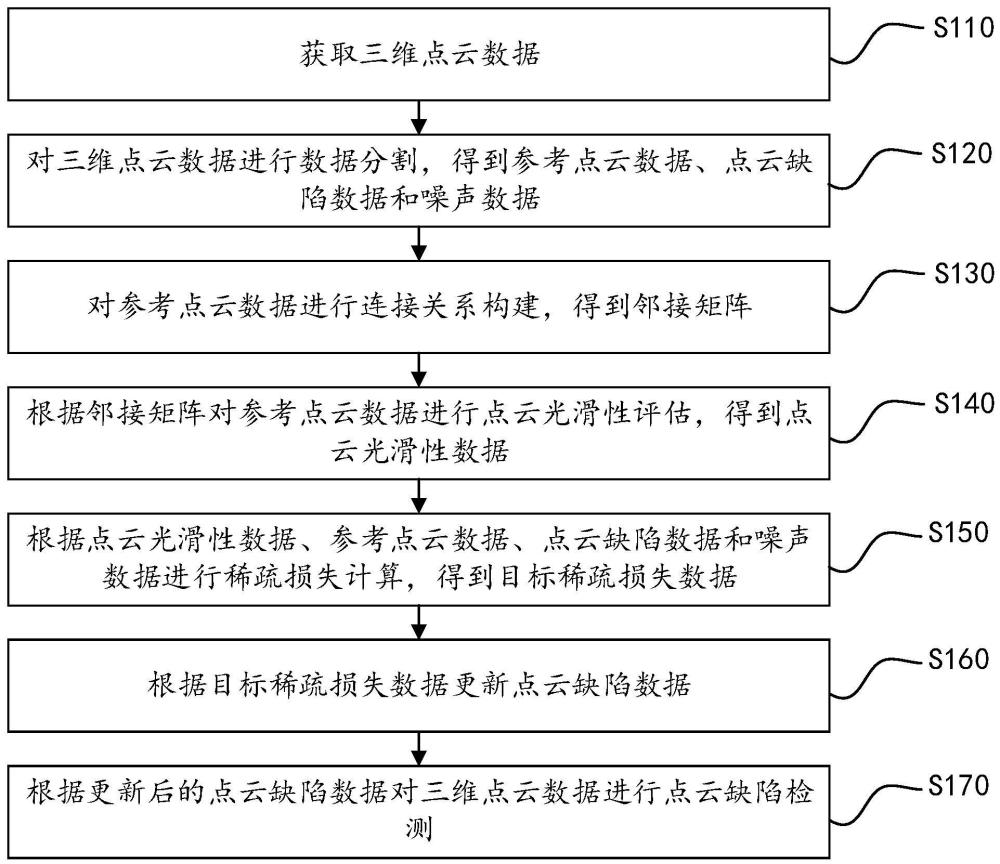
3、获取三维点云数据;
4、对所述三维点云数据进行数据分割,得到参考点云数据、点云缺陷数据和噪声数据;
5、对所述参考点云数据进行连接关系构建,得到邻接矩阵;
6、根据所述邻接矩阵对所述参考点云数据进行点云光滑性评估,得到点云光滑性数据;
7、根据所述点云光滑性数据、所述参考点云数据、所述点云缺陷数据和所述噪声数据进行稀疏损失计算,得到目标稀疏损失数据;其中,所述点云光滑性数据与所述参考点云数据相乘等于零,所述点云光滑性数据与所述噪声数据相乘等于所述噪声数据;
8、根据所述目标稀疏损失数据更新所述点云缺陷数据;
9、根据更新后的所述点云缺陷数据对所述三维点云数据进行点云缺陷检测。
10、在一些实施例,所述参考点云数据包括多个参考点云位置向量,所述对所述参考点云数据进行连接关系构建,得到邻接矩阵,包括:
11、获取所述参考点云位置向量邻近的多个参考点云位置向量,得到邻域点云数据;
12、对所述邻域点云数据进行主成分分析,得到拟合平面;
13、基于所述拟合平面对所述参考点云位置向量进行平面投影,得到平面投影向量;
14、根据所述平面投影向量对所述参考点云数据进行连接关系构建,得到所述邻接矩阵。
15、在一些实施例,根据所述平面投影向量对所述参考点云数据进行连接关系构建,得到所述邻接矩阵,包括:
16、对所述平面投影向量进行相似度计算,得到参考点云相似度数据;
17、根据所述参考点云相似度数据确定所述参考点云位置向量之间的连接程度数据;
18、根据所述连接程度数据对所述参考点云数据进行连接关系构建,得到所述邻接矩阵。
19、在一些实施例,所述根据所述邻接矩阵对所述参考点云数据进行点云光滑性评估,得到点云光滑性数据,包括:
20、对所述邻接矩阵进行归一化处理,得到归一化矩阵;
21、根据预设单位矩阵和所述归一化矩阵对所述参考点云数据进行点云光滑性评估,得到所述点云光滑性数据。
22、在一些实施例,所述根据所述点云光滑性数据、所述参考点云数据、所述点云缺陷数据和所述噪声数据进行稀疏损失计算,得到目标稀疏损失数据,包括:
23、根据所述点云缺陷数据进行第一稀疏损失计算,得到第一稀疏损失数据;
24、根据所述点云光滑性数据、所述参考点云数据和所述噪声数据进行第二稀疏损失计算,得到第二稀疏损失数据;
25、对所述第一稀疏损失数据和所述第二稀疏损失数据进行加权求和,得到所述目标稀疏损失数据。
26、在一些实施例,所述根据所述目标稀疏损失数据更新所述点云缺陷数据,包括:
27、若所述目标稀疏损失数据大于预设损失阈值,则根据所述点云光滑性数据进行第一点云特征提取,得到点云光滑特征;
28、根据所述点云光滑特征、所述点云光滑性数据、所述参考点云数据和所述噪声数据进行第二点云特征提取,得到第一点云缺陷特征;
29、根据所述点云缺陷数据进行第三点云特征提取,得到第二点云缺陷特征;
30、根据所述点云光滑特征和所述第二点云缺陷特征确定更新阈值;
31、根据所述第一点云缺陷特征和所述更新阈值更新所述点云缺陷数据。
32、在一些实施例,所述根据所述第一点云缺陷特征和所述更新阈值更新所述点云缺陷数据,包括:
33、若所述第一点云缺陷特征大于或者等于所述更新阈值,则根据所述点云光滑特征、所述第一点云缺陷特征和所述第二点云缺陷特征确定目标缺陷数据;
34、根据所述目标缺陷数据更新所述点云缺陷数据。
35、为实现上述目的,本技术实施例的第二方面提出了一种点云缺陷检测装置,所述装置包括:
36、数据获取模块,用于获取三维点云数据;
37、数据分割模块,用于对所述三维点云数据进行数据分割,得到参考点云数据、点云缺陷数据和噪声数据;
38、连接关系构建模块,用于对所述参考点云数据进行连接关系构建,得到邻接矩阵;
39、点云光滑性评估模块,用于根据所述邻接矩阵对所述参考点云数据进行点云光滑性评估,得到点云光滑性数据;
40、稀疏损失计算模块,用于根据所述点云光滑性数据、所述参考点云数据、所述点云缺陷数据和所述噪声数据进行稀疏损失计算,得到稀疏损失数据;其中,所述点云光滑性数据与所述参考点云数据相乘等于零,所述点云光滑性数据与所述噪声数据相乘等于所述噪声数据;
41、缺陷数据更新模块,用于根据所述稀疏损失数据更新所述点云缺陷数据;
42、点云缺陷检测模块,用于根据更新后的所述点云缺陷数据对所述三维点云数据进行点云缺陷检测。
43、为实现上述目的,本技术实施例的第三方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的点云缺陷检测方法。
44、为实现上述目的,本技术实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的点云缺陷检测方法。
45、本技术提出的点云缺陷检测方法、点云缺陷检测装置、电子设备及计算机可读存储介质,通过获取三维点云数据,对三维点云数据进行数据分割,得到参考点云数据、点云缺陷数据和噪声数据,以通过点云缺陷数据判断非结构化三维点云数据是否存在缺陷。对参考点云数据进行连接关系构建,得到邻接矩阵,以根据邻接矩阵建立非结构化三维点云数据的图表示,实现对制造产品表面的建模。针对光滑的复杂表面,根据邻接矩阵对参考点云数据进行点云光滑性评估,得到点云光滑性数据,通过对制造产品表面的光滑性进行度量,将点云光滑性数据作为影响缺陷检测的因素,以提高对于光滑表面缺陷检测的准确性。通过稀疏学习的方法对缺陷进行建模,根据点云光滑性数据、参考点云数据、点云缺陷数据和噪声数据进行稀疏损失计算,得到目标稀疏损失数据。根据目标稀疏损失数据更新点云缺陷数据,根据更新后的点云缺陷数据对三维点云数据进行点云缺陷检测,从而实现对非结构化三维点云数据表示下的制造产品表面进行缺陷检测。
- 还没有人留言评论。精彩留言会获得点赞!