深海载人潜水器安全性评估方法、装置及设备
本发明实施例涉及安全性评估,具体涉及一种基于主动半监督学习的深海载人潜水器安全性评估方法、装置及设备。
背景技术:
1、深海载人潜水器通常工作在高盐、高压和强不确定性的深海环境中,充满了未知风险,一旦发生故障不能及时处理时,不仅可能造成水下作业任务无法完成,而且可能会直接威胁到潜航员的生命安全。对于深海载人潜水器的安全性评估就显得尤为重要,必须结合传感器采集的数据,实时评估潜水器整体系统的安全性,对于各种可能发生的故障进行预警,并通过自救系统保证潜航员的生命安全。然而目前深海载人潜水器运行时的安全性评估主要依赖于潜航员的主观判断,由于潜航员在水下的视野和精力均有限,容易导致误判,一旦出现误判将会造成不可挽回的后果。因此,亟需研究数据驱动的安全性评估方法,以辅助潜航员做出自救决策。
2、深海载人潜水器在下潜过程中会通过传感器采集丰富的数据,但是这些数据都是没有安全状态标签的,对这些数据进行安全状态标注的成本较高,一般难以获取到足够多的有标注数据。半监督学习可以同时从有标注数据和无标注数据中挖掘信息,因此可以采用半监督学习模型来对深海载人潜水器的安全性进行评估。对于深海载人潜水器来说,同一个安全状态可能对应着多种故障情景,例如对于中等安全状态,可能是由于可调水舱漏水导致的,也可能是由于副机械手油位补偿泄漏导致的,还可能是由于主机械手油位补偿泄漏导致的,而其中某些故障情景可能只有无标注数据,缺乏对应的系统安全性信息,称之为未知情景。虽然半监督学习可以同时从有标注数据和无标注数据中挖掘信息,但是传统半监督学习模型并没有考虑无标注数据中存在未知情景的情况。未知情景会损害传统半监督学习模型性能,使得传统半监督学习模型无法准确评估未知情景出现时的系统安全性,进而无法做出正确的自救决策,带来安全隐患。
技术实现思路
1、本发明实施例提供一种基于主动半监督学习的深海载人潜水器安全性评估方法、装置及设备,用以解决现有方法在未知情景存在时评估准确率低的问题。
2、第一方面,本发明实施例提供一种基于主动半监督学习的深海载人潜水器安全性评估方法,包括:
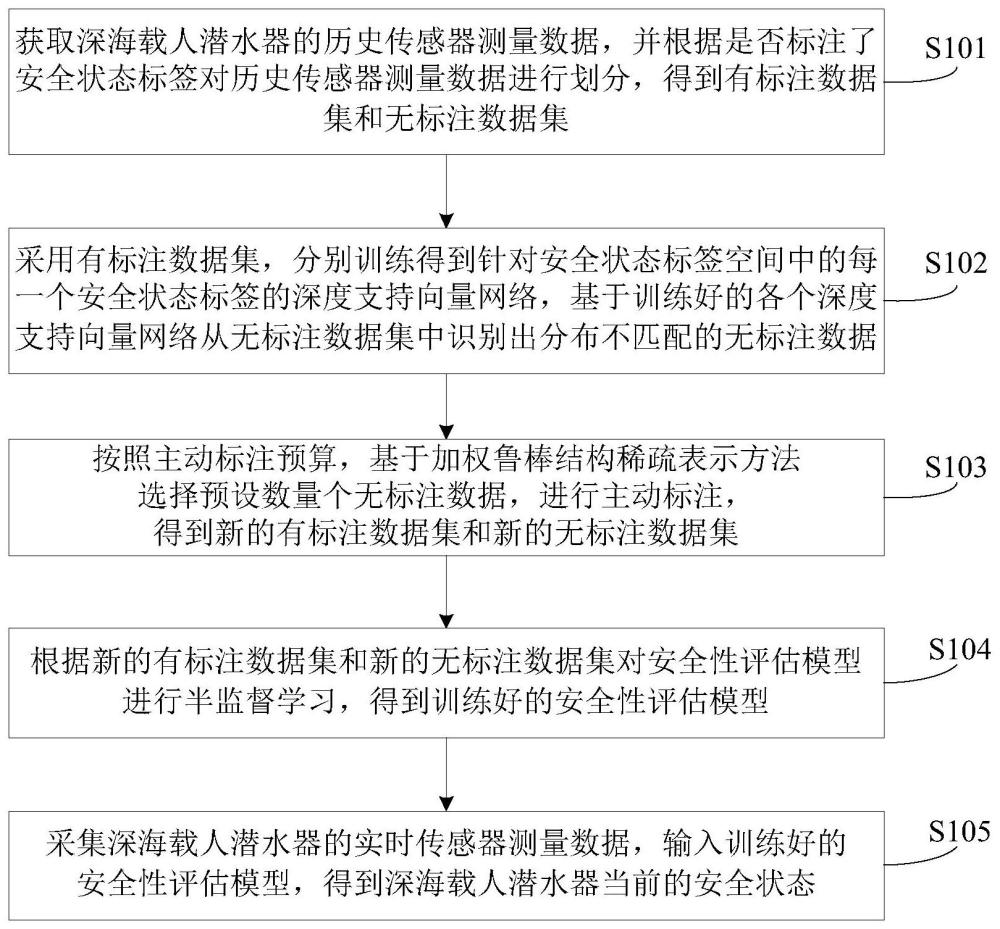
3、获取深海载人潜水器的历史传感器测量数据,并根据是否标注了安全状态标签对历史传感器测量数据进行划分,得到有标注数据集和无标注数据集;
4、采用有标注数据集,分别训练得到针对安全状态标签空间中的每一个安全状态标签的深度支持向量网络,基于训练好的各个深度支持向量网络从无标注数据集中识别出分布不匹配的无标注数据;
5、按照主动标注预算,基于加权鲁棒结构稀疏表示方法选择预设数量个无标注数据,进行主动标注,得到新的有标注数据集和新的无标注数据集;
6、根据新的有标注数据集和新的无标注数据集对安全性评估模型进行半监督学习,得到训练好的安全性评估模型;
7、采集深海载人潜水器的实时传感器测量数据,输入训练好的安全性评估模型,得到深海载人潜水器当前的安全状态。
8、一种实施例中,深度支持向量网络的损失函数如下:
9、
10、其中,是深度支持向量网络φk(·;wk)的权重参数集合,lk是隐藏层数,nk是有标注数据集中属于安全状态标签k的数据样本个数,是有标注数据集中属于安全状态标签k的第i个数据样本,λ是正则化超参数,ck是特征空间中的超球体中心点,一般固定为训练样本初始正向传播所产生的网络输出的平均值。
11、一种实施例中,基于训练好的各个深度支持向量网络从无标注数据集中识别出分布不匹配的无标注数据,包括:
12、对于无标注数据集中的每一个数据样本,采用训练好的各个安全状态标签的深度支持向量网络确定该数据样本关于各个安全状态标签的分布不匹配得分sk(x)如下:
13、
14、若一个数据样本关于各个安全状态标签的分布不匹配得分均大于预设阈值θk,k=1,2,...,m,则确定该数据样本为分布不匹配数据。
15、一种实施例中,按照主动标注预算,基于加权鲁棒结构稀疏表示方法选择预设数量个无标注数据,包括:
16、构建如下优化目标函数j:
17、
18、
19、其中,x是选取的代表性无标注样本,d是权重矩阵,γ是超参数,n是选取的代表性无标注样本数量,a是优化目标矩阵;
20、对优化目标函数进行求解,得到优化目标矩阵对应的最佳矩阵a*;
21、计算最佳矩阵a*所有行向量的元素绝对值之和,并按照降序排列,选择前面预设数量个行向量对应的无标注数据。
22、一种实施例中,当x为整体无标注数据集时,权重矩阵d中的元素根据如下表达式确定:
23、
24、其中,ρ是大于1的常数,id表示分布匹配,m是安全状态标签空间中安全状态标签的个数,sk(xi)是无标注数据集中第i个无标注数据xi关于安全状态标签k的分布不匹配得分。
25、一种实施例中,当x为识别出的分布不匹配无标注数据时,权重矩阵可定义为d=do:
26、
27、
28、其中,m是安全状态标签空间中安全状态标签的个数,sk(xi)是分布不匹配的无标注数据xo中第i个无标注数据xi关于安全状态标签k的分布不匹配得分,是分布不匹配的无标注数据的数量。
29、一种实施例中,当x为识别出的分布不匹配无标注数据时,权重矩阵可定义为其中,i表示单位矩阵,是分布不匹配的无标注数据的数量。
30、第二方面,本发明实施例提供一种用于深海载人潜水器的安全性评估装置,包括:
31、获取模块,用于获取深海载人潜水器的历史传感器测量数据,并根据是否标注了安全状态标签对历史传感器测量数据进行划分,得到有标注数据集和无标注数据集;
32、识别模块,用于采用有标注数据集,分别训练得到针对安全状态标签空间中的每一个安全状态标签的深度支持向量网络,基于训练好的各个深度支持向量网络从无标注数据集中识别出分布不匹配的无标注数据;
33、标注模块,用于按照主动标注预算,基于加权鲁棒结构稀疏表示方法选择预设数量个无标注数据,进行主动标注,得到新的有标注数据集和新的无标注数据集;
34、训练模块,用于根据新的有标注数据集和新的无标注数据集对安全性评估模型进行半监督学习,得到训练好的安全性评估模型;
35、评估模块,用于采集深海载人潜水器的实时传感器测量数据,输入训练好的安全性评估模型,得到深海载人潜水器当前的安全状态。
36、第三方面,本发明实施例提供一种电子设备,包括:
37、至少一个处理器和存储器;
38、存储器存储计算机执行指令;
39、至少一个处理器执行存储器存储的计算机执行指令,使得至少一个处理器执行如第一方面任一项所述的用于深海载人潜水器的安全性评估方法。
40、第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如第一方面任一项所述的用于深海载人潜水器的安全性评估方法。
41、本发明实施例提供的基于主动半监督学习的深海载人潜水器安全性评估方法、装置及设备,通过获取深海载人潜水器的历史传感器测量数据,并根据是否标注了安全状态标签对历史传感器测量数据进行划分,得到有标注数据集和无标注数据集;采用有标注数据集,分别训练得到针对安全状态标签空间中的每一个安全状态标签的深度支持向量网络,基于训练好的各个深度支持向量网络从无标注数据集中识别出分布不匹配的无标注数据;按照主动标注预算,基于加权鲁棒结构稀疏表示方法选择预设数量个无标注数据,进行主动标注,得到新的有标注数据集和新的无标注数据集;根据新的有标注数据集和新的无标注数据集对安全性评估模型进行半监督学习,得到训练好的安全性评估模型;采集深海载人潜水器的实时传感器测量数据,输入训练好的安全性评估模型,得到深海载人潜水器当前的安全状态,便可以根据当前的安全状态采取相应的自救措施。考虑了无标注数据集中存在未知情景,构建深度支持向量描述网络识别分布不匹配样本,并基于加权鲁棒结构稀疏表示方法选择代表性样本进行主动标注,提升了安全性评估的准确率和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!