一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法
本发明涉及轨道垂向不平顺识别领域,尤其是涉及一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法。
背景技术:
1、轨道不平顺是指轨道结构的基本尺寸和几何位形与理想的轨道状态之间的偏差。在列车运行过程中,轨道不平顺是引起机车车辆和轨道结构振动最显著的因素,直接决定着行车的安全性和舒适性。为满足高速、重载和高行车密度对轨道的高平顺性需求,在目前的铁路建设中,普遍采用桥梁结构作为下部基础,以减小路基不均匀沉降,保障列车运行的平稳性。其中,在高速铁路和跨越山岭、河谷等水陆障碍物的线路中,桥梁所占比例尤为显著。因此,铁路桥梁轨道不平顺的有效识别对于保障运营列车安全平稳运行具有重要的现实意义。
2、目前,针对轨道不平顺的检测方法,按照有无轮载作用主要分为:静态检测和动态检测。静态检测是指在无轮载作用下,利用人工道尺、弦绳以及小型检测设备等徒步检测的方法,该类方法只能部分反映钢轨不平顺状况,检测效率低;而动态检测采用轨道检查车对不平顺进行定期检测,以得到不平顺的空间曲线。该类方法能全面反映轨道不平顺,但存在以下缺陷:(1)通常限定了在一定周期内对轨道不平顺进行检测,对突发性的严重异变无法提供直接有效的反馈,存在一定的安全隐患;(2)轨检车往往搭载多套光学精密设备,自身研制成本较为高昂;(3)在检测时需占用轨道运输资源。目前我国高速铁路轨道检查遵循“动态检测为主,动、静态检测相结合”的检测模式,而在城轨领域,考虑到检测成本,仍以人工巡检、静态检测为主。
技术实现思路
1、本发明的目的是为了提供一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,该方法具有经济、便捷和高效的优点,能够有效地利用运营中的车辆响应对轨道不平顺进行高精度快速识别,进而为轨道结构的维养提供一定的数据支撑。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,包括:
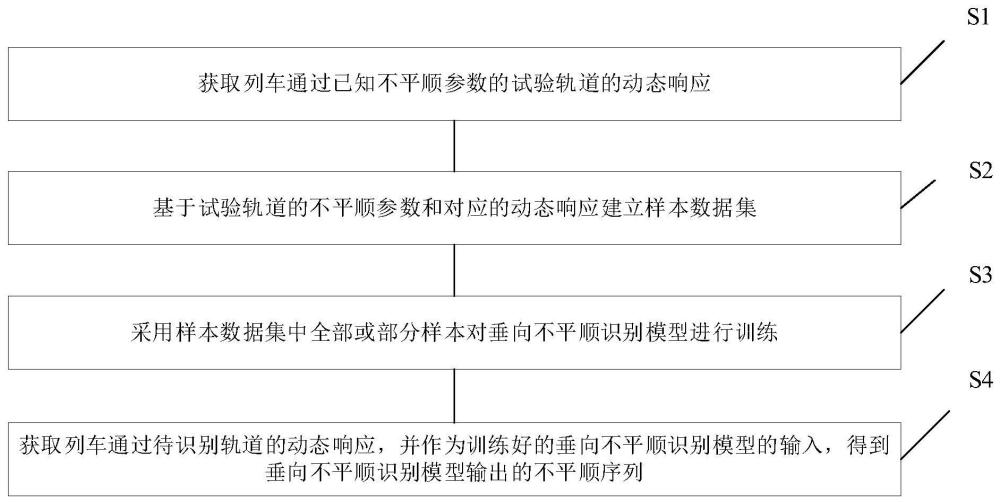
4、步骤s1:获取列车通过已知不平顺序列的试验轨道的动态响应;
5、步骤s2:基于试验轨道的不平顺序列和对应的动态响应建立样本数据集;
6、步骤s3:采用样本数据集中全部或部分样本对垂向不平顺识别模型进行训练;
7、步骤s4:获取列车通过待识别轨道的动态响应,并作为训练好的垂向不平顺识别模型的输入,得到垂向不平顺识别模型输出的不平顺序列。
8、所述动态响应包括竖向加速度的测量序列和竖向位移的测量序列。
9、所述竖向加速度由两个加速度传感器测得,其中一个加速度传感器位于车辆前部底架的中心,另一个加速度传感器位于车辆后部底架的中心;
10、所述竖向位移由两个位移传感器测得,其中一个位移传感器位于车辆前部底架的中心,另一个位移传感器位于车辆后部底架的中心。
11、所述垂向不平顺识别模型的工作过程包括:
12、步骤s41:根据预配置的滑窗长度,对输入的动态响应进行连续下采样得到第一子序列集,以及对输入的动态响应进行间隔下采样得到第二子序列集,其中,所述第一子序列集和第二子序列集的维度为m×n×pie,pie=t/m,m为滑窗长度,n为动态响应中包含的参数个数,t为测量序列的长度,/为取商运算符;
13、步骤s42:对第一子序列集进行时间维度和通道维度的投影变换得到第三子序列集,对第二子序列集进行时间维度和通道维度的投影变换得到第四子序列集,其中,所述第三子序列集和第四子序列集的维度为f×n×pie,f为预配置的常数;
14、步骤s43:将第三子序列集进行线性映射得到第一特征向量集,将第四子序列集进行线性映射得到第二特征向量集,其中,所述第一特征向量集的维度为f×n×1;
15、步骤s44:将第一特征向量集和第一特征向量集沿时间维度进行同类型变量拼接,沿通道维度进行不同类型变量排列,得到第一特征矩阵,其中,所述第一特征矩阵的维度为2f×n;
16、步骤s45:对第一特征矩阵,进行信息交换得到第二特征矩阵,其中,所述第二特征矩阵的维度为l×n,l为采样次数;
17、步骤s46:对第二特征矩阵进行线性映射得到预测序列矩阵;
18、步骤s47:基于预测序列矩阵得到不平顺序列。
19、所述步骤s43映射过程的数学表达式为:
20、
21、
22、其中:为第一特征向量集中第i行向量,w5为第五权重矩阵,为第三子序列集中第i行向量,b5为第五偏置矩阵,为第二特征向量集中第i行向量,w6为第六权重矩阵,为第四子序列集中第i行向量,b6为第六偏置矩阵。
23、所述步骤s46映射过程的数学表达式为:
24、
25、其中:为预测序列矩阵中第i行向量,w7为第七权重矩阵,为第二特征矩阵中第i行向量,b7为第七偏置矩阵。
26、所述步骤s42中投影变换的具体过程包括:
27、步骤s421:将维度为第一子序列集中m×pie的序列矩阵沿着时间维度进行映射,形成维度为e×pie的序列矩阵,其中,e为预配置的值;
28、步骤s422:将维度为e×pie的序列矩阵沿着通道维度进行映射,形成同样维度的序列矩阵;
29、步骤s423:将步骤s422得到的序列矩阵再次沿着时间维度进行映射,形成维度为f×pie的序列矩阵。
30、e和f的取值均小于m。
31、所述步骤s2具体包括:
32、步骤s21:对试验轨道的不平顺序列和对应的动态响应进行归一化;
33、步骤s22:基于归一化后的不平顺序列和对应的动态响应建立样本数据集。
34、所述步骤s1中的数据由仿真或实测得到。
35、与现有技术相比,本发明具有以下有益效果:
36、1、采用机器学习的方式对垂向不平顺进行识别,该方法具有经济、便捷和高效的优点,能够有效地利用运营中的车辆响应对轨道不平顺进行高精度快速识别,进而为轨道结构的维养提供一定的数据支撑。
37、2、采用竖向加速度和竖向位移作为输入参数,并且结合特殊设计的垂向不平顺识别模型的工作过程和传递函数,从而可以加速机器学习模型的收敛,在测试机的测试中,也具有较高的准确性。
技术特征:
1.一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,包括:
2.根据权利要求1所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述动态响应包括竖向加速度的测量序列和竖向位移的测量序列。
3.根据权利要求2所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述竖向加速度由两个加速度传感器测得,其中一个加速度传感器位于车辆前部底架的中心,另一个加速度传感器位于车辆后部底架的中心;
4.根据权利要求3所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述垂向不平顺识别模型的工作过程包括:
5.根据权利要求4所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述步骤s43映射过程的数学表达式为:
6.根据权利要求4所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述步骤s46映射过程的数学表达式为:
7.根据权利要求4所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述步骤s42中投影变换的具体过程包括:
8.根据权利要求4所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,e和f的取值均小于m。
9.根据权利要求1所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述步骤s2具体包括:
10.根据权利要求1所述的一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,其特征在于,所述步骤s1中的数据由仿真或实测得到。
技术总结
本发明涉及一种基于深度学习的铁路桥梁轨道垂向不平顺识别方法,包括:步骤S1:获取列车通过已知不平顺序列的试验轨道的动态响应;步骤S2:基于试验轨道的不平顺序列和对应的动态响应建立样本数据集;步骤S3:采用样本数据集中全部或部分样本对垂向不平顺识别模型进行训练;步骤S4:获取列车通过待识别轨道的动态响应,并作为训练好的垂向不平顺识别模型的输入,得到垂向不平顺识别模型输出的不平顺序列。与现有技术相比,本发明能够有效地利用运营中的车辆响应对轨道不平顺进行高精度快速识别。
技术研发人员:冯东明,王保全,曾琰,黎剑安
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!