一种基于三维可视化的配电网点云模型构建系统的制作方法
本发明属于配电网模型构建;尤其涉及一种基于三维可视化的配电网点云模型构建系统。
背景技术:
1、随着三维可视化技术的发展,对配电网点云模型构建的需求越来越强烈,配电网可视化模型是配电网作业的核心信息,配电网模型的构建能够为配电网的日常生产调度提供可视化界面及仿真基础,随着智慧电网的建设,传统的构建配电网模型的方法已经不能满足配电网入场生产的检测要求。
2、传统的自动构建系统大多只考虑了二维平面信息,无法完整的表达配电网的三维空间信息,虽然现有的系统可以实现三维可视化,但可视化效果往往不够理想,对模型的表达往往只停留在可视化层面,缺乏对配电网运行状态的分析和评估功能,不能为技术人员提供有效的决策支持。
技术实现思路
1、本发明要解决的技术问题是:提供一种基于三维可视化的配电网点云模型构建系统,以解决现有技术的三维可视化,但可视化效果往往不够理想,对模型的表达往往只停留在可视化层面,缺乏对配电网运行状态的分析和评估功能,不能为技术人员提供有效的决策支持。
2、本发明的技术方案是:
3、基于三维可视化的配电网点云模型构建系统,包括:
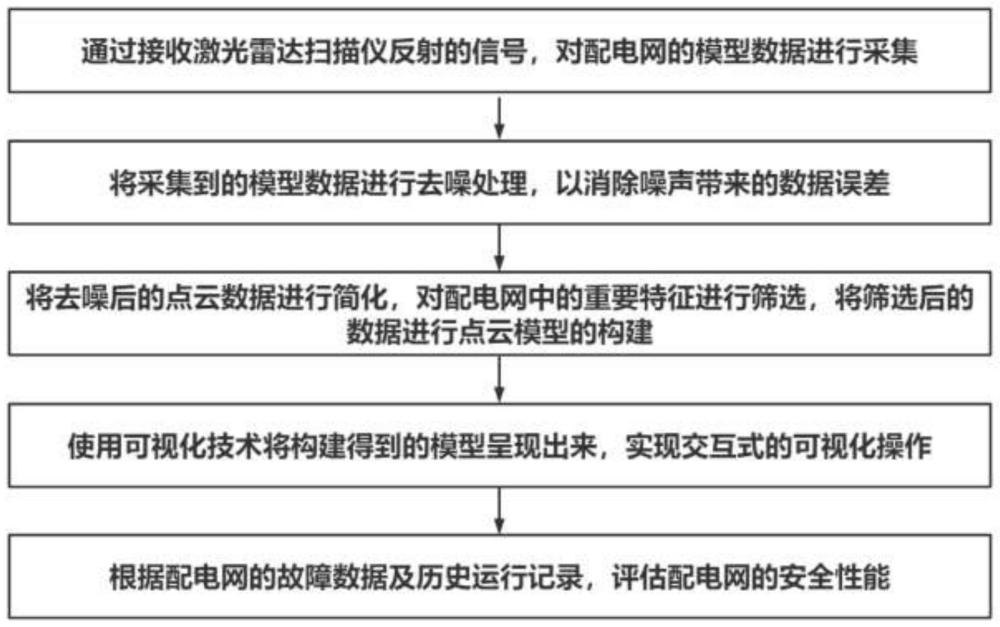
4、数据采集模块:通过接收激光雷达扫描仪反射的信号,对配电网的模型数据进行采集;
5、数据去噪模块:将采集到的模型数据进行去噪处理,以消除噪声带来的数据误差;
6、点云重建模块:将去噪后的点云数据进行简化,对配电网中的重要特征进行筛选,将筛选后的数据进行点云模型的构建;
7、可视化模块:使用可视化技术将构建得到的模型呈现出来,实现交互式的可视化操作;
8、运行状态评估模块:根据配电网的故障数据及历史运行记录,评估配电网的安全性能。
9、在上述的基于三维可视化的配电网点云模型构建系统中,所述数据采集模块通过部署在配电网目标区域内的激光雷达扫描仪,进行配电网数据的扫描,通过启动激光雷达扫描仪,接收激光雷达扫描仪反射回的信号,采集物体表面的纹理、材质信息,将采集到的数据信息下发至数据去噪模块。
10、在上述的基于三维可视化的配电网点云模型构建系统中,所述数据去噪模块通过分析离散点的空间分布,离散点云离主题点云的距离大,而主题点云密度较高,分布相对集中,将获取到的带有噪声点的点云数据集表示为d={di,i=1,2,...,n},di表示数据集中的任一点云,当点云数据集中所有点到其余子邻域的平均距离服从高斯分布,即pi服从高斯分布且该分布的形状由均值和标准差决定,则均值及标准差的具体计算公式为:
11、
12、
13、其中,qz表示均值,pi表示其到领域中k个点的平均距离,数据去噪的最大距离阈值可表示为:
14、dmax=d′+n*bz
15、其中,d’表示点云到邻域中k个点的平均距离,其中n表示标准差系数,当距离超过dmax时被判定为噪声点,将其进行去除,当距离小于dmax则判定为非噪声点,具体的,数据去噪包括以下步骤:
16、s1、输入带有噪声点的点云数据d,对于任一点云通过近邻搜索找出其k个距离最近的点,计算出其距离其邻域每个点的平均距离;
17、s2、计算点云与k临近点与各点云之间的距离并计算平均距离,得到平均距离的集合{eq1,eq2,eq3,...eqn};
18、s3、计算均值和标准差,根据均值和标准差得到基于高斯分布的最大阀值dmax=d′+n*bz;
19、s4、将计算出的点云与其k近邻之间的均值与最大阈值dmax相比较,最终完成噪声点去除。
20、在上述的基于三维可视化的配电网点云模型构建系统中,所述点云重建模块通过减少点云数据的冗余性,提取点云中的重要特征,通过点云简化,对曲率值进行筛选,将筛选后的点云数据进行点云模型的构建,具体的点云简化的具体方法如下:
21、s1、当一个球面上的n个点云pint(xi,yi,zi)(i=1,2,3,...,n),他的中心坐标可以表示为ct(xct,yct,zct),半径可以表示为:
22、r=(x-xct)2+(y-yct)2+(z-zct)2
23、
24、其中,c表示球面拟合误差,由以上计算可得球面线性方程表示为:
25、x2+y2+z2-2(x*xct+y*yct+z*zct)+c=0
26、其中,x2、y2、z2表示点的坐标相对于原点的距离平方,通过将点云数据中的每个点带入该方程,若计算结果等于0,则表示该点位于拟合的球面上,建立局部坐标系,将pint作为坐标远点,x轴、y轴及z轴方向与绝对坐标系方向相同,将pint点附近的点进行平移,得到其在新建的局部坐标系的空间坐标;
27、s2、将相邻点坐标值带入球面线性方程中求得参数xct、yct、zct与c,对曲率进行计算,具体计算公式如下:
28、
29、其中,c2表示拟合球面模型与点云数据之间的距离误差的平方,求得曲率后,通过与预设的阈值进行比较,判断其是否属于该点,对所有点进行判断后完成简化。
30、s3、进行点云模型的构建,具体构建步骤如下:
31、2)从点云中提取特征描述子,选择点p的邻域点集p={p_1,p_2,p_3,...,p_k},对于每个邻域点p_i,计算其相对于点p的坐标差,坐标差的具体计算公式为:
32、bc=p_i-p
33、构建法线方程,法线方程的具体计算公式为:
34、a*n=b
35、其中,a表示一个k×3矩阵,每行对应一个邻域点的坐标差,n表示一个3×1的法线向量,b表示一个k×1的零向量,其中,k表示邻域点集的数量,通过计算得到误差最小化的法线向量n,n的具体计算公式为:
36、n=(a^t*a)^-1*a^t*b
37、其中,a^t*a表示a^t与a的矩阵乘积,a^t*b表示a^t与b的矩阵乘积;
38、2)将不同视角的特征进行匹配,建立点对应关系,建立第一个特征描述子f_a与第二特征描述子f_b,通过欧氏距离计算两组特征描述子之间的距离,选择最接近的匹配,欧氏距离的具体计算公式如下:
39、d=|f_a-f_b|
40、4)根据配准后的点云数据,使用隐式拟合函数使其在点云数据附近逼近实际的表面,依据隐式拟合函数重建出连续的表面模型,将表面模型转换为体素表示,将连续的几何形状离散化为体素网格,具体的,表面模型建立的具体计算方式如下:
41、
42、其中,x表示任意点,x_i表示点云数据中的采样点,w_i表示权重,表示径向基函数,将隐式函数转换为体素网格表示,将三维空间划分为均匀的体素网格,根据隐式函数的值判断每个体素是否在表面内部,其具体公式为:
43、s(x)=sign(f(x))
44、其中,s(x)为体素网格中点x的标记,f(x)为隐式函数在点x处的值,当f(x)>0时s(x)=1,表示点x在表面外部,当f(x)<0时,s(x)=-1,表示点x在表面内部,根据体素网格的内部和边界,提取出连续的表面模型。
45、在上述的基于三维可视化的配电网点云模型构建系统中,所述可视化模块创建一个可视化窗口,用于显示三维模型,将构建得到的三维模型数据加载到可视化窗口中,解析三维模型中的纹理坐标信息,设置模型光源的位置、颜色及强度,具体的光照计算的具体计算公式为:
46、color=hg+mf+jm
47、其中,hg表示环境光照分量,mf表示漫反射分量,jm表示镜面反射分量。
48、在上述的基于三维可视化的配电网点云模型构建系统中,所述运行状态评估模块将配电网的故障数据与历史运行记录进行采集,并将采集的数据同步到可视化三维模型中,采集的数据包括故障发生时间、持续时间以及故障类型信息,依据采集的数据,对可靠性指标进行计算,可靠性指标包括可用性、平均故障间隔时间以及平均修复时间,可用性的具体计算公式为:
49、k=pz/(pz+pf)
50、其中,pz表示平均无故障时间,pf表示平均修复时间,平均故障间隔时间的具体计算方式为:
51、g=z/gc
52、其中,z表示总运行时间,gc表示故障次数,平均修复时间的具体计算公式为:
53、f=zx/xc
54、其中,zx表示总修复时间,xc表示修复次数。
55、本发明有益效果是:
56、本发明通过接收激光雷达扫描仪反射的信号,对配电网的模型数据进行采集,将采集到的模型数据进行去噪处理,以消除噪声带来的数据误差,将去噪后的点云数据进行简化,对配电网中的重要特征进行筛选,将筛选后的数据进行点云模型的构建,使用可视化技术将构建得到的模型呈现出来,实现交互式的可视化操作,根据配电网的故障数据及历史运行记录,评估配电网的安全性能。本发明通过三维可视化界面,能够直观地了解配电网的运行情况,提升运维效率,能够直观的了解到电网的结构和运行情况;为配电网的管理和运维提供精确的数据支持。
57、解决了现有技术的三维可视化,但可视化效果往往不够理想,对模型的表达往往只停留在可视化层面,缺乏对配电网运行状态的分析和评估功能,不能为技术人员提供有效的决策支持等技术问题。
- 还没有人留言评论。精彩留言会获得点赞!