实景三维实时渲染二次曝光优化方法及系统与流程
本发明涉及实景三维图像处理,特别是一种实景三维实时渲染二次曝光优化方法及系统。
背景技术:
1、由于实景三维在航飞的时候已经经历了一次曝光,进入三维渲染引擎中,引擎自带的光源会对实景三维进行二次曝光,造成实景三维渲染过程中,较亮的区域过度曝光导致渲染效果发白,较黑的区域在渲染过程中由于周围物体的遮挡,无法接收引擎自带的光照效果,渲染效果反而会更黑。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种实景三维实时渲染二次曝光优化方法,该方法利用灰度图像分区的灰度值进行修正补偿处理使得实景三维图像过曝光区域得到修正。
2、为达到上述目的,本发明提供如下技术方案:
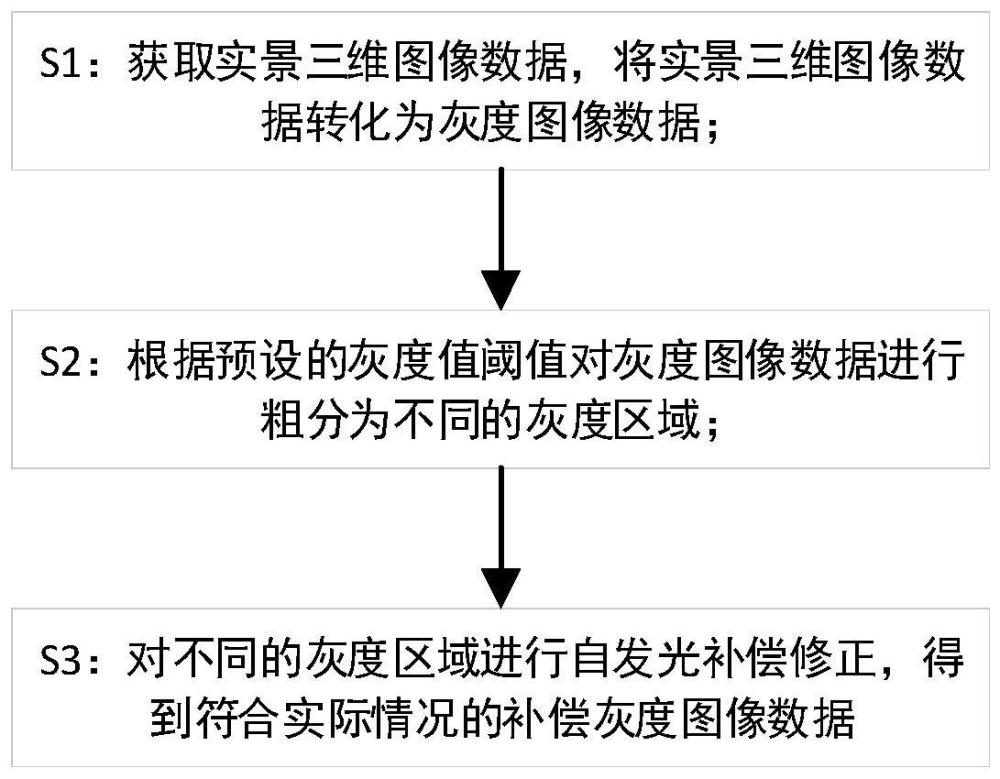
3、本发明提供的实景三维实时渲染二次曝光优化方法,包括以下步骤:
4、s1:获取实景三维图像数据,将实景三维图像数据转化为灰度图像数据;
5、s2:根据预设的灰度值阈值对灰度图像数据进行粗分为不同的灰度区域;
6、s3:对不同的灰度区域进行自发光补偿修正,得到符合实际情况的补偿灰度图像数据。
7、进一步,所述步骤s1中的将实景三维图像数据转化为灰度图像数据,具体过程如下:
8、导入实景三维图像数据,判断图像数据是否为灰度图像,如果否,则将图像数据转化为灰度图像,在实时提取灰度图像数据的灰度值;如果图像数据是rgb图像,则分别将rgb图像各图像通道的数值转为灰度值;
9、进一步,所述rgb图像各图像通道的数值转为灰度值是通过浮点法计算出每个网格体顶点的灰度值,具体公式如下:
10、gray=r*kr+g*kg+b*kb;
11、其中,gray表示灰度值;r、g、b分别表示rgb图像数据的红色像素值、绿色像素值、蓝色像素值;kr、kg、kb分别为r、g、b计算比例系数。
12、进一步,所述比例系数的取值范围如下:kr的取值为0.29-0.30;kg的取值为0.58-0.59;kb的取值为0.110-0.115。
13、进一步,所述步骤s2中的灰度区域按照以下方式划分;
14、如果灰度值≥0.15时,则该灰度区域为高光区域;
15、如果灰度值[0.02,0.15]时,则该灰度区域为中光区域;
16、如果灰度值≤0.02时,则该灰度区域为低光区域;
17、所述灰度值范围为0-1,0表示最低灰度,1表示最高灰度;
18、进一步,所述步骤s3中的补偿修正按照以下方式进行:
19、设置自发光倍数粗值;其中,高光区域的自发光倍数粗值设置为h1为0.8,通过高光区域灰度值*0.8得到高光区域灰度值;
20、中光区域的自发光倍数粗值设置为h2为1,通过高光区域灰度值*1得到中光区域灰度值;
21、低光区域的自发光倍数粗值设置为h3为1.2,通过低光区域灰度值*1.2得到低光区域灰度值。
22、本发明提供的实景三维实时渲染二次曝光优化系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述方法。
23、本发明的有益效果在于:
24、本发明提供的实景三维实时渲染二次曝光优化方法,针对实景三维提取灰度值,按照高灰度值、低灰度值、中灰度值进行细化区分,然后在三维引擎渲染的同时,针对高灰度值的部分,实时降低灰度值,针对低灰度值的部分,实时提高灰度值。这样,就能保证,整个实景三维渲染的光照平衡,解决了二次曝光过度发白或者过度发黑的问题。
25、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.实景三维实时渲染二次曝光优化方法,其特征在于:包括以下步骤:
2.如权利要求1所述的实景三维实时渲染二次曝光优化方法,其特征在于:所述步骤s1中的将实景三维图像数据转化为灰度图像数据,具体过程如下:
3.如权利要求1所述的实景三维实时渲染二次曝光优化方法,其特征在于:所述rgb图像各图像通道的数值转为灰度值是通过浮点法计算出每个网格体顶点的灰度值,具体公式如下:
4.如权利要求3所述的实景三维实时渲染二次曝光优化方法,其特征在于:所述比例系数的取值范围如下:kr的取值为0.29-0.30;kg的取值为0.58-0.59;kb的取值为0.110-0.115。
5.如权利要求1所述的实景三维实时渲染二次曝光优化方法,其特征在于:所述步骤s2中的灰度区域按照以下方式划分;
6.如权利要求1所述的实景三维实时渲染二次曝光优化方法,其特征在于:所述步骤s3中的补偿修正按照以下方式进行:
7.实景三维实时渲染二次曝光优化系统,其特征在于:包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述权利要求1至6任一项所述的方法。
技术总结
本发明公开一种实景三维实时渲染二次曝光优化方法及系统,针对实景三维提取灰度值,按照高灰度值、低灰度值、中灰度值进行细化区分,然后在三维引擎渲染的同时,针对高灰度值的部分,实时降低灰度值,针对低灰度值的部分,实时提高灰度值。这样,就能保证,整个实景三维渲染的光照平衡,解决了二次曝光过度发白或者过度发黑的问题。
技术研发人员:冷江林,黄士用,吕品,陈国锐,王淮,杨溢,盛朗,谭小龙,周静,陈苹
受保护的技术使用者:睿宇时空科技(重庆)股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!