波流联合激励下悬浮隧道管体动力响应的数值预报方法
本发明属于水下悬浮隧道,具体涉及一种悬浮隧道管体动力响应的数值预报方法。
背景技术:
1、随着科学技术的发展,很多国家在一些重要海域上架起了跨海大桥、沉底隧道、海底隧道等跨海通道。但当面对海面宽阔、海底较深的海域环境时(如:博肯峡湾、摩西那海峡、内浦湾等),跨海大桥、沉底隧道以及海底隧道这些传统跨海通道的建设会耗费极大的人力、物力、财力,而且施工极具挑战性。为了克服这些问题,水下悬浮隧道(submergedfloating tunnel)这一概念应运而生。水下悬浮隧道简称悬浮隧道,作为一种新型跨海交通形式,悬浮隧道以其独特的优势(如:单位长度造价不受两岸距离大小的影响、对距离及水深基本没有限制、可以免受恶劣天气的影响、以及对两岸及海上环境影响较小等),吸引了越来越多的国家对其进行积极研究。根据锚固方式不同,可以将悬浮隧道分为:自由式、锚索式、浮筒式和承压墩柱式四种类型。自由式和浮筒式悬浮隧道的稳定性较差,承压墩柱式悬浮隧道对海底地质要求较高。相比于其它三种类型,锚索式悬浮隧道是目前国际上公认的最具有发展前景的悬浮隧道类型,其主体由管体结构、水下基础、支撑系统和连接系统构成。悬浮隧道管体下端通过锚索支撑系统与水下基础相连,在重力、浮力及锚索张力的作用下达到受力平衡,管体处于复杂的海洋环境中。当这些复杂环境载荷作用在悬浮隧道管体上时,周期性载荷激励会引起结构发生振动,该种振动不但会影响到行人和行车的舒适和安全,长时期的振动还会导致结构发生疲劳,并有可能进一步导致管体发生疲劳破坏。悬浮隧道作为大型海下结构物,结构一旦发生破坏,将会造成不可挽救的人员伤亡和财产损失。因此,如何保证人员和车辆能够稳定、安全地通过复杂环境载荷作用下的悬浮隧道管体,是悬浮隧道可行性研究的关键问题之一。
2、在悬浮隧道可能遭受的众多海洋环境载荷(如:波浪、海流、浮冰、地震等)中,波浪和海流这两种环境载荷对悬浮隧道管体动力响应的影响最大、且持续时间最久。因此,建立一种稳定可靠的波流联合激励下悬浮隧道管体动力响应的数值预报方法、并基于该方法深入揭示波流联合激励下悬浮隧道管体的动力响应机理,是保障人员和车辆安全稳定地通过悬浮隧道管体的关键研究问题。
3、针对波流联合激励下悬浮隧道管体的动力响应研究,依据研究方法大致可分为:模型实验研究、理论计算研究以及数值计算研究。模型实验研究由于研究成本很高,因此,无法进行大规模的基于变参数影响的动力响应模型实验研究。理论计算研究由于其在计算过程中采用了大量的经验模型系数,因此,很难深入揭示复杂环境载荷作用下的结构动力响应机理。与模型实验和理论计算研究相比,基于cfd数值方法的数值计算研究由于其具备研究成本低、研究过程中采用的经验模型系数少等优势,非常适合基于该方法展开大规模的变参数影响的动力响应机理研究。
技术实现思路
1、本发明是为了解决目前的悬浮隧道管体动力响应的数值预报方法并没有考虑因漩涡发放引起的流体对管体的影响存在数值预报误差的问题。
2、一种波流联合激励下悬浮隧道管体动力响应的数值预报方法,包括以下步骤:
3、步骤一、对波浪场进行数值建模,再基于波浪场构建波流联合激励场,得到波流联合激励下水质点x方向速度y方向速度以及波面方程进而编写速度入口处的流体x方向速度、y方向速度的udf函数,以及波面变化udf函数;
4、步骤二、使用四阶龙格-库塔法离散悬浮隧道管体振动控制方程,得到悬浮隧道管体结构横荡方向和垂荡方向的速度u、v以及位移x、y以及初始时刻输入悬浮隧道管段的位置和速度条件,进而编写包括初始时刻输入悬浮隧道管段的位置和速度条件和悬浮隧道管体结构横荡方向和垂荡方向的速度u、v以及位移x、y的悬浮隧道管体动力响应udf函数;
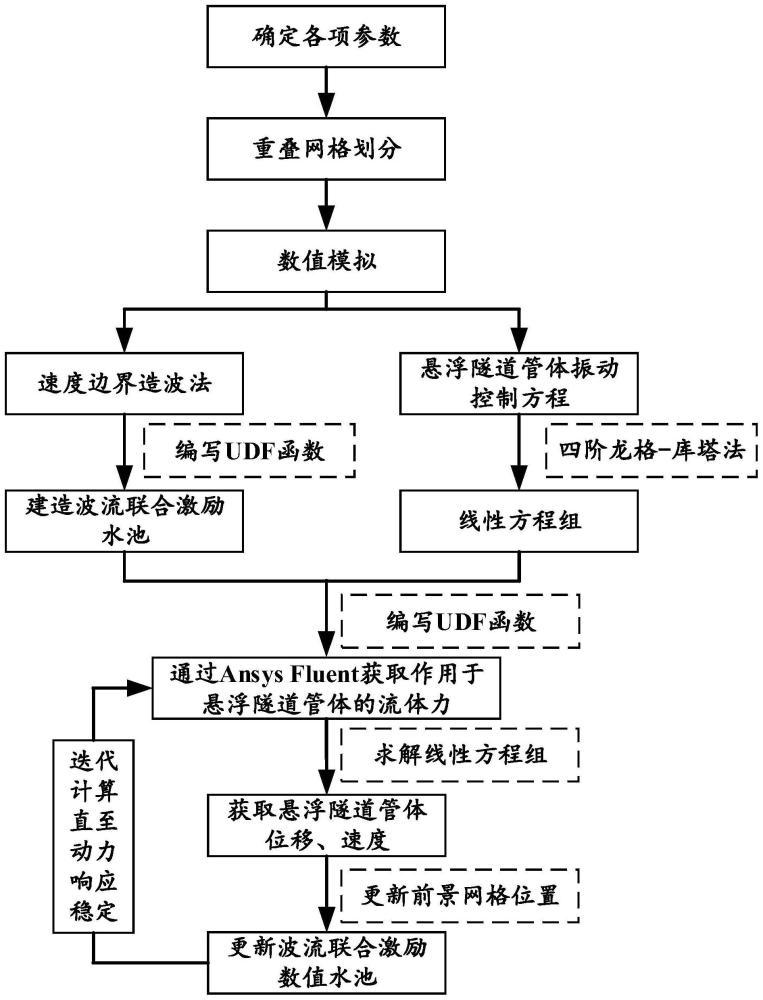
5、步骤三、重叠网格划分与流固耦合数值模拟:
6、首先确定悬浮隧道管体样式及其尺寸、锚索刚度ki、工程阻尼ci、淹没深度d、流速u、水深h、波幅a和波周期t等参数,然后进行网格划分和数值模拟;
7、进行网格划分的过程包括以下步骤:
8、首先画出前景网格,前景网格计算域围绕悬浮隧道布置,要求围绕悬浮隧道管体表面的第一层网格高度及网格高度变化满足湍流模型的要求;随后确定整体流场域大小,画出背景网格;同时对部分网格计算区域进行加密,首先要对波浪的波高所占网格进行加密使之满足波浪模拟的要求;之后要对悬浮隧道管体的运动区域进行加密,保证其网格尺寸与前景网格边界网格的尺寸基本一致;
9、进行数值模拟的过程包括以下步骤:
10、通过ansys fluent软件读入前景网格和背景网格文件,采用双精度求解器,选取瞬态计算方式,重力加速度方向选择竖直向下,湍流模型选取sst k-omega模型;接着将多相流模型打开,选择水和空气作为两个计算相;随后导入步骤一和步骤二中的udf函数;然后将悬浮隧道壁面以及上下流场边界设为壁面边界条件,出口设为压力出口,入口设为速度入口,并赋予步骤一中的udf函数,前景网格边界设置为overset格式;在动网格设置中,分别给悬浮隧道壁面、前景网格计算域、前景网格边界赋予控制悬浮隧道管体动力响应的udf函数;计算方法选择simple算法,瞬态控制方程选择一阶隐式方法;根据数值模拟前确定的流场数据,初始化整个流场,最后选取适当的计算时间步长进行计算,进而得到悬浮隧道管体横荡和垂荡的位移与时间的关系曲线,即为动力响应。
11、进一步地,步骤一中的波流联合激励下水质点x方向速度y方向速度以及波面方程如下:
12、x方向速度为:
13、
14、y方向速度为:
15、
16、波面方程为:
17、
18、其中,ω为波浪圆频率,h为水深;a为波幅,x、y为波浪水质点所在的坐标位置,t为时间;为来流影响下波浪的波数,u为来流速度。
19、进一步地,步骤一中采用airy线性波对波浪场进行数值建模,采用airy线性波对波浪场建立的数值模型如下:
20、色散关系为:
21、ω2=gktanh(kh) (1)
22、速度势为:
23、
24、波面方程为:
25、η=acos(kx-ωt) (3)
26、x方向速度为:
27、
28、y方向速度为:
29、
30、式中,ω为波浪圆频率,g为重力加速度,k为波数,h为水深;a为波幅,x、y为波浪水质点所在的坐标位置,φ为速度势,t为时间。
31、进一步地,步骤一中基于波浪场构建波流联合激励场的过程中,当水流存在时,色散关系如下:
32、
33、式中,为来流影响下波浪的波数,u为来流速度;
34、依据色散关系得到波数的变化;并确定来流影响下波高的表达式如下:
35、
36、基于式(6)和式(7),进而得到波流联合激励下水质点x方向速度y方向速度以及波面方程
37、进一步地,步骤二所述的悬浮隧道管体振动控制方程如下:
38、将悬浮隧道管体看作一个波流联合激励下的刚体振动模型,其在横荡和垂荡方向的悬浮隧道管体振动控制方程如下:
39、
40、
41、式中,m为单位长度的悬浮隧道管体结构质量,cx为横荡阻尼系数,kx为结构横荡方向刚度系数,cy为垂荡阻尼系数,ky为结构垂荡方向刚度系数,fx(t)为管段在横荡方向受到的流体力,fy(t)为管段在垂荡方向受到的流体力,fb为分配在单位长度管体上的锚索预张力,x、dx(t)/dt、d2x(t)/dt2分别表示横荡方向位移、速度和加速度,y、dy(t)/dt、d2y(t)/dt2分别表示垂荡方向位移、速度和加速度;进一步化简为:
42、
43、
44、其中:
45、
46、
47、式中,ωx为结构横荡方向自振圆频率,ωy为结构垂荡方向自振圆频率,ζx为结构横荡方向阻尼比,ζy为结构垂荡方向阻尼比。
48、进一步地,悬浮隧道管体振动控制方程中的fx(t)以及fy(t)是基于ansys fluent软件通过对悬浮隧道管体表面压力和粘性应力进行积分得到的。
49、进一步地,步骤二所述使用四阶龙格-库塔法离散悬浮隧道管体振动控制方程,进而编写包括初始时刻输入悬浮隧道管段的位置和速度条件和悬浮隧道管体结构横荡方向和垂荡方向的速度u、v以及位移x、y的悬浮隧道管体动力响应udf函数的过程包括以下步骤:
50、为求解横荡方向悬浮隧道管体振动控制方程,将式(13)写成:
51、
52、基于经典四阶龙格库塔法,将式(17)离散为:
53、
54、其中:
55、
56、
57、
58、
59、为求解垂荡方向悬浮隧道管体振动控制方程,将式(14)写成:
60、
61、基于经典四阶龙格库塔法,将式(23)离散为:
62、
63、其中:
64、
65、
66、
67、
68、式中,k1x、k2x、k3x、k4x、k1y、k2y、k3y、k4y、l1x、l2x、l3x、l4x、l1y、l2y、l3y、l4y为四阶龙格-库塔法的转换方程,δt、tn、tn+1分别表示时间步长、n时刻、n+1时刻,u(t)为结构横荡方向速度,v(t)为结构垂荡方向速度;
69、根据tn时刻的位移x(tn)、y(tn)和速度u(tn)、v(tn),通过联立方程(17)~(28)计算出下一时刻tn+1=tn+δt的位移x(tn+1)、y(tn+1)和速度u(tn+1)、v(tn+1);
70、初始时刻输入悬浮隧道管段的位置和速度条件如下:
71、x(t0)=x1,y(t0)=y1 (29)
72、u(t0)=0,v(t0)=0 (30)
73、式中,x1、y1表示初始时刻悬浮隧道管体重心位置;
74、先将公式(13)(14)和边界条件(29)(30)联立,然后通过公式(17)~(28)计算得到结构横荡方向和垂荡方向的速度u、v以及位移x、y;据公式(17)~(30)写出悬浮隧道管体动力响应udf函数。
75、有益效果:
76、本发明设计了一种波流联合激励下悬浮隧道管体动力响应的数值预报方法,该方法可用于深入揭示悬浮隧道管体在波浪和洋流载荷联合激励下的动力响应机理,从而为悬浮隧道管体的结构安全设计提供技术支撑。与现有技术相比,本发明的技术方案具有以下优点:
77、1、在目前的理论及数值计算中,作用在悬浮隧道上的波流载荷只是基于morison方程或衍射理论来考虑周围流体对结构的惯性力以及平均拖曳力,并没有考虑因漩涡发放引起的流体对管体的升力和振荡拖曳力、以及管体和周围流体之间的相互作用。很明显,目前这种考虑方法无法准确揭示管体结构与周围流体之间的耦合响应特征。鉴于此,本发明建立的波流联合激励下悬浮隧道管体的动力响应数值预报模型,考虑管体与周围流体之间的耦合作用,因此本发明可以有效的提高数值预报的准确度。
78、2、在目前的模型实验研究中,由于实验成本的限制,针对波流联合激励下悬浮隧道管体的动力响应研究,只是基于少量结构参数或环境参数的响应特征研究。基于这些少量参数研究得到的结果,很难深入揭示悬浮隧道管体的动力响应机理。基于此,本发明提出的数值预报方法可以非常方便、快速地研究复杂波流联合激励下悬浮隧道的动力响应。该数值方法研究成本较低,而且非常适合应用于大归规模地基于管体结构及周边环境参数影响的数值计算,最终实现基于大量数值计算结果总结归纳出波流联合激励下悬浮隧道管体动力响应机理的研究目标。
- 还没有人留言评论。精彩留言会获得点赞!