光伏装置的故障定位方法、装置、设备、介质及程序产品与流程
本发明涉及光伏,尤其涉及一种光伏装置的故障定位方法、装置、设备、介质及程序产品。
背景技术:
1、随着无人机技术的发展,在光伏电站的运维过程中,无人机巡检技术愈来愈取代传统的人工巡检。通过设定无人机飞行的重叠度和飞行高度等参数,即可开启针对光伏电站的自动化巡检。巡检结束后,无人机再将图像数据上传到业务系统,进行故障点的检测和定位,得到故障点的位置信息。将故障信息和对应的位置信息输出给运维人员,帮助运维人员进行精准消缺。相对于人工巡检,无人机的介入和巡检智能分析系统极大程度上降低了人工参与成本。
2、毫无疑问的是,对故障点进行精准定位尤为重要,这将直接关系到运维人员能否在偌大的水面或山地等场区内精确找到故障点并进行消缺。随着无人机巡检的场景不断扩大,逐渐衍生出了一些问题,其中,对故障点重复定位的问题尤为突出。
技术实现思路
1、本发明提供了一种光伏装置的故障定位方法、装置、设备、介质及程序产品,以解决故障点定位重复的问题,避免故障被重复统计,提高故障定位的精准度。
2、根据本发明的一方面,提供了一种光伏装置的故障定位方法,包括:
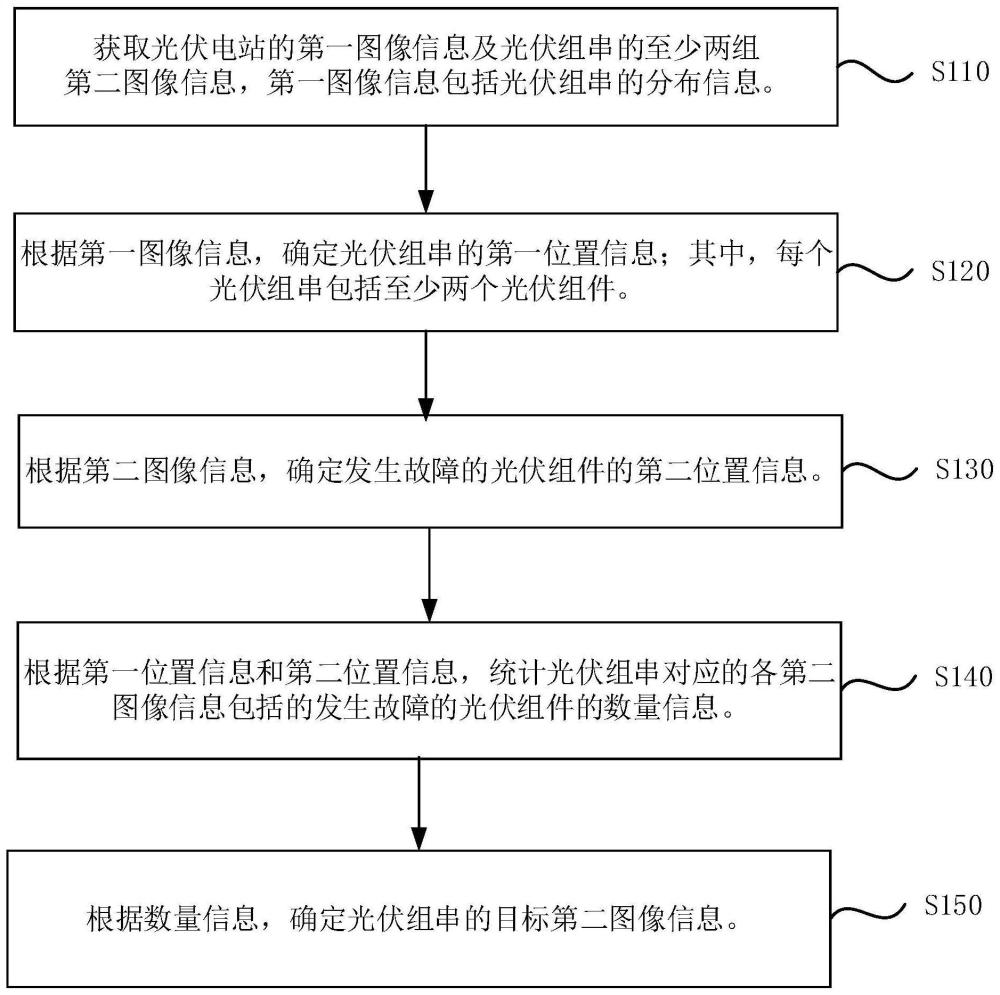
3、获取光伏电站的第一图像信息及光伏组串的至少两组第二图像信息,第一图像信息包括光伏组串的分布信息;
4、根据第一图像信息,确定光伏组串的第一位置信息;其中,每个光伏组串包括至少两个光伏组件;
5、根据第二图像信息,确定发生故障的光伏组件的第二位置信息;
6、根据第一位置信息和第二位置信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息;
7、根据数量信息,确定光伏组串的目标第二图像信息。
8、可选地,根据第一图像信息,确定光伏组串的第一位置信息,包括:
9、根据第一图像信息,将光伏电站的光伏组件划分为至少两个光伏组串;光伏组串的边界包括四个顶点;
10、根据第一图像信息,确定各光伏组串的各顶点的第一位置信息;其中,第一位置信息包括第一坐标。
11、可选地,根据第二图像信息,确定发生故障的光伏组件的第二位置信息,包括:
12、根据各第二图像信息,确定光伏组串中发生故障的光伏组件的第二位置信息;其中,第二位置信息包括第二坐标。
13、可选地,根据各第二图像信息,确定光伏组串中发生故障的光伏组件的第二位置信息,包括:
14、根据各第二图像信息,将第二图像信息中发生故障的光伏组件对应的故障检测框的中心点像素位置,作为光伏组件在第二图像信息中的像素位置;
15、基于运动恢复结构算法,对第二图像信息进行三维重建,得到第二图像信息的第一点云数据;根据第二图像信息的第一点云数据,确定发生故障的光伏组件对应的第二点云数据;
16、根据第二图像信息提取特征点;根据特征点,形成满足预设几何约束条件的匹配关系,基于求解最小化重投影误差方法,计算第二图像信息对应的相机参数;
17、根据像素位置、第二点云数据以及相机参数,计算光伏组串中发生故障的光伏组件的第二位置信息。
18、可选地,根据第一位置信息和第二位置信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息,包括:
19、根据第一坐标和第二坐标,确定发生故障的光伏组件在光伏组串中的位置信息;
20、根据位置信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息。
21、可选地,根据数量信息,确定光伏组串的目标第二图像信息,包括:
22、将光伏组串对应的各第二图像信息对应的发生故障的光伏组件的数量信息进行排序;
23、根据排序结果,确定光伏组串的目标第二图像信息。
24、可选地,根据排序结果,确定光伏组串的目标第二图像信息,包括:
25、将光伏组串的各第二图像信息对应的发生故障的光伏组件的数量最多的第二图像信息,确定为光伏组串的目标第二图像信息。
26、可选地,根据排序结果,确定光伏组串的目标第二图像信息,包括:
27、当存在两组及以上第二图像信息对应的发生故障的光伏组件的数量最多时,基于随机算法,确定光伏组串的目标第二图像信息。
28、可选地,根据第一位置信息和第二位置信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息,包括:
29、获取光伏组串对应的各第二图像信息的分割掩膜,结合第一图像信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息;其中,第二图像信息的分割掩膜用于标记发生故障的光伏组件的位置信息。
30、可选地,在根据数量信息,确定光伏组串的目标第二图像信息之后,还包括:
31、根据目标第二图像信息,确定发生故障的光伏组件的位置坐标;
32、根据位置坐标,对光伏组件进行检修。
33、根据本发明的另一方面,提供了一种光伏装置的故障定位装置,包括:
34、第一获取模块,用于获取光伏电站的第一图像信息,第一图像信息包括光伏电站的光伏组串的分布信息;
35、第一位置模块,用于根据第一图像信息,确定光伏组串的第一位置信息;其中,每个光伏组串包括至少两个光伏组件;
36、第二获取模块,用于获取光伏组串的至少两组第二图像信息;
37、第二位置模块,用于根据第二图像信息,确定发生故障的光伏组件的第二位置信息;
38、数量统计模块,用于根据第一位置信息和第二位置信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息;
39、目标确定模块,用于根据数量信息,确定光伏组串的目标第二图像信息。
40、根据本发明的另一方面,提供了一种电子设备,电子设备包括:
41、至少一个处理器;以及
42、与至少一个处理器通信连接的存储器;其中,
43、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行本发明任一实施例的光伏装置的故障定位方法。
44、根据本发明的另一方面,提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使处理器执行时实现本发明任一实施例的光伏装置的故障定位方法。
45、根据本发明的另一方面,提供了一种计算机程序产品,计算机程序产品包括计算机程序,计算机程序在被处理器执行时实现根据本发明任一实施例的光伏装置的故障定位方法。
46、本发明实施例的技术方案通过获取光伏电站的第一图像信息,同时获取光伏组串的至少两组第二图像信息,分别根据第一图像信息和第二图像信息,确定光伏组串的第一位置信息和发生故障的光伏组件的第二位置信息。根据第一位置信息和第二位置信息,统计光伏组串对应的各第二图像信息包括的发生故障的光伏组件的数量信息。再根据数量信息,确定光伏组串的目标第二图像信息。由于第一图像信息具有唯一性,根据第一图像信息确定的光伏组串的第一位置信息也具有唯一性,与之对应的目标第二图像信息也是唯一的,避免了对发生故障的光伏组件进行重复统计。因此,本发明实施例提供的技术方案可以解决故障点定位重复的问题,避免故障被重复统计,提高故障定位的精准度。
47、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!