一种自动校桩方法、系统和设备
本发明属于公路校桩,特别涉及一种自动校桩方法、系统和设备。
背景技术:
1、在对公路基础设施等资产进行检测时,通常以轮速编码器定位、gnss定位或者视觉定位信息为依据,来对检测数据进行存储及分割统计。公路信息使用时,需要依托公路自身定位体系的桩号来对位置进行查找,因此就产生了检测数据定位与使用者定位之间的差异。
2、通常的做法是,检测时要求检测人员对设置于公路右侧或左侧的公里桩位置进行记录,在检测后的数据处理环节,以此为依据对检测数据进行拉伸、压缩,或“长链短链”的划分,从而输出检测数据的分析计算结果。现有技术中公开有公路里程桩号修正的方法,但是均未从偏差原理出发,因此也未能从检测数据应用角度出发从根本上解决准确可靠的测量问题。比如:专利公开号为“cn113627273a”,名称为“一种基于视觉的高速公路里程桩号定位方法”的中国发明专利,和专利公开号为“cn115798206a”,名为“一种道路巡检目标公路里程桩号定位方法”,其通过t时刻经标定内外参数的双目成像视差,及t时刻记录的卫星定位信息及航向信息,对识别出的公路桩号牌位置进行解算,结合识别出的桩号数值实现校桩效果。又如:专利公开号为“cn105070088a”名称为“gps对接公路里程桩号系统及其实现方法”的中国发明专利,其通过检测人员手工输入,以消除轮速里程计累积误差的方式实现车辆的桩号里程定位。再如:专利公开号为“cn106772500a”,名称为“基于电子地图和gps坐标的高速公路公里桩号确定方法”的中国发明专利,其利用预先采集的公路桩号位置与卫星定位位置对应关系库,移动中的数据采集车辆通过检索、比对实现校桩。
3、检测数据桩号与公路桩号位置不对应,是由于多种原因造成的,以公路桩号位置为节点进行调整,是数据粗对准的解决思路,同时,关键检测目标公路桩号由于存在间隔大、识认目标小、易遮挡、检测车辆位置不同推算结果不同等问题都会使得系统失效。同时,基于预先对公路桩号位置进行准确定位,又存在耗时长、作业危险且标准数据缺乏标准,标准数据无统一查询服务支撑等问题,难以实施。检测人员根据观察校桩,存在不同人员反应不同、作业习惯不同;相同人员也会因身体状况不同,难以做到相同位置准确校桩。此外,上说所有方法,在进行多车道多次检测时,均难以解决数据起终点、过程位置横向数据对齐的问题。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种自动校桩方法、系统和设备,采用三级优化的方式,有效提升道路检测校桩准确性。
2、为实现上述目的,本发明采用以下技术方案:
3、一种自动校桩方法,包括以下步骤:
4、采集待检测载具车辆的行驶环境信息;所述行驶环境信息包括图像信息、第一里程信息和位置姿态信息;以及采用卡尔曼滤波对所述第一里程信息进行滤波得到预测的第二里程信息;
5、将预设长度的第二里程信息利用位置姿态信息首先进行平曲线分段,在平曲线的基础上再进行竖曲线分段,确定在竖曲线分段中消除竖曲线影响距离和在平曲线分段中消除竖曲线影响距离;消除检测位置车轮里程计平曲线偏移,叠加道路中线位置估计的竖曲线偏移,在竖曲线分段中计算消除竖曲线影响车轮里程计偏移的距离;利用消除竖曲线影响车轮里程计偏移的距离调整检测桩号;
6、提取图像信息中里程桩号,对所述里程桩号进行特征提取,将提取的里程桩号作为区间值,对调整后的检测桩号进行优化,用于消除测量累计误差。
7、进一步的,所述图像信息包括公里桩号和百米桩号;所述位置姿态信息包括载具车辆的加速度、航向角和俯仰角。
8、进一步的,所述采用卡尔曼滤波对所述第一里程信息进行滤波得到预测的第二里程信息的详细过程包括:
9、通过车载控制器读取载具车辆的第一速度,利用所述第一速度和位置姿态信息中载具车辆的加速度进行卡尔曼滤波得到一次预测的载具车辆第二速度;
10、利用所述第二速度和第一里程信息进行二次卡尔曼滤波得到二次预测的载具车辆第二里程信息。
11、进一步的,所述一次预测方程为:
12、
13、一次更新方程为:
14、
15、其中,表示第时刻速度最优估计值;表示第时刻的加速度;表示第时刻的噪声;表示第时刻的先验估计协方差矩阵,即的协方差矩阵;表示时刻的后验估计协方差矩阵,即的协方差矩阵;表示测量噪声矩阵,表示过程激励噪声矩阵;表示卡尔曼系数;表示第时刻速度的观测值;表示时刻的后验估计协方差矩阵,即的协方差矩阵;
16、二次预测方程为:
17、
18、二次更新方程为:
19、
20、表示第时刻里程的预测值;表示第时刻里程最优估计值;表示第时刻里程的观测值。
21、进一步的,所述将预设长度的第二里程信息利用位置姿态信息首先进行平曲线分段的过程包括:
22、对预设长度为的数据进行平曲线分段,利用位置姿态信息中的航向角离散检测数据记为,离散间距为,则,设直曲阈值为,则连续(20/)个,则记录首个为第一个平曲线线段起始位置,直到(20/)个,最后一个位置为第一个平曲线段结束位置;其中平曲线分段序号;分段数据计为,其中为分段号,为对应数据里程。
23、进一步的,所述在平曲线的基础上再进行竖曲线分段的过程包括:
24、将长度为的数据进行竖曲线分段,利用位置姿态信息中的俯仰角离散检测数据记为,离散间距为,则,设坡曲阈值为,若连续(100/)个,则记录首个位置为第一个竖曲线线段起始位置,直到连续(100/)个,最后一个位置竖曲线线段结束位置,其中为竖曲分段序号,以此类推对竖曲线分段,记为;其中为竖曲线对应数据里程;为与上一段竖曲线的里程增量。
25、进一步的,所述确定在竖曲线分段中消除竖曲线影响距离和在平曲线分段中消除竖曲线影响距离;消除检测位置车轮里程计平曲线偏移,叠加道路中线位置估计的竖曲线偏移,在竖曲线分段中计算消除竖曲线影响车轮里程计偏移的距离具体包括:
26、对应的竖曲线半径为,故,中消除竖曲线影响的距离为:
27、;其中,为中消除竖曲线影响的距离;
28、消除平曲线影响距离为:;为消除平曲线影响距离;
29、对道路中线特征提取,估计出检测位置与道路中心线之间的距离,与平曲线分段对应,对应位置平曲线半径的测量值为;中消除车轮里程计偏移的距离为:;为中消除车轮里程计偏移的距离;
30、叠加道路中线位置估计的竖曲线偏移后,中消除竖曲线影响的距离为:
31、;为叠加道路中线位置估计的竖曲线偏移后,中消除竖曲线影响的距离。
32、进一步的,所述将提取的里程桩号作为区间值,对所述调整后的检测桩号进行优化,用于消除测量累计误差的过程包括:采用线性插值法进行求解,设目标函数为:
33、;
34、其中,为运动约束;为检测数据前一级优化完成后的按照平竖曲线的节点,所述为检测数据后一级优化完成后的按照平竖曲线的节点;
35、当整公里桩号的对应虚拟里程位置差与检测数据累积值和不相等时,得到优化后的桩号点位。
36、本发明还提出了一种自动校桩系统,所述系统包括第一优化模块、第二优化模块和第三优化模块;
37、所述第一优化模块用于采集待检测载具车辆的行驶环境信息;所述行驶环境信息包括图像信息、第一里程信息和位置姿态信息;以及采用卡尔曼滤波对所述第一里程信息进行滤波得到预测的第二里程信息;
38、所述第二优化模块用于将预设长度的第二里程信息利用位置姿态信息首先进行平曲线分段,在平曲线的基础上再进行竖曲线分段,确定在竖曲线分段中消除竖曲线影响距离和在平曲线分段中消除竖曲线影响距离;消除检测位置车轮里程计平曲线偏移;叠加道路中线位置估计的竖曲线偏移,在竖曲线分段中计算消除竖曲线影响车轮里程计偏移的距离;利用消除竖曲线影响车轮里程计偏移的距离调整检测桩号;
39、所述第三优化模块用于提取图像信息中里程桩号,对所述里程桩号进行特征提取,将提取的里程桩号作为区间值,对调整后的检测桩号进行优化,用于消除测量累计误差。
40、本发明还提出了一种自动校桩设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述程序时可实现所述的一种自动校桩方法
41、
技术实现要素:
中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
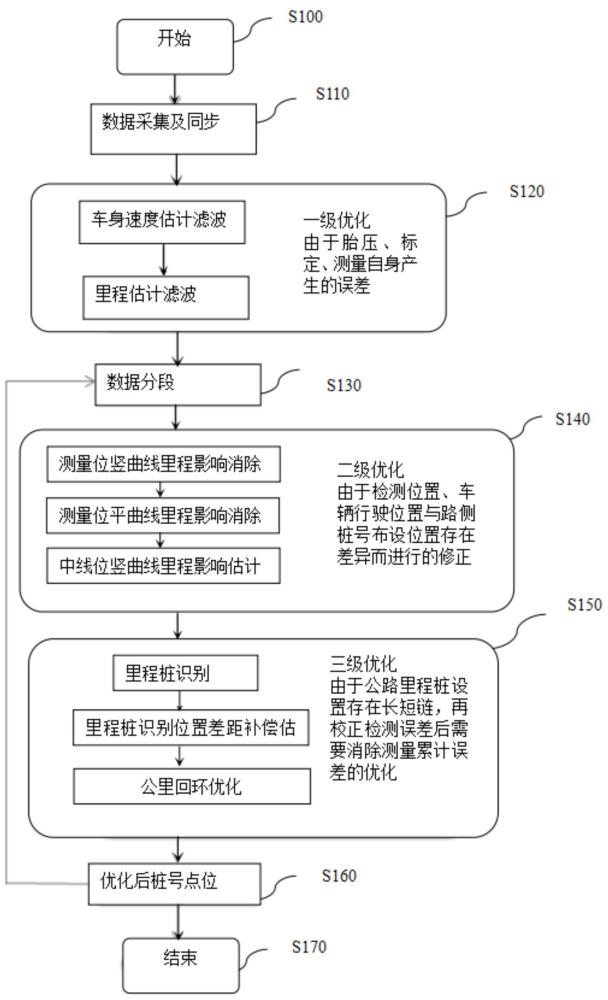
42、本发明提出了一种自动校桩方法、系统和设备,属于公路校桩技术领域,该方法包括:采集待检测载具车辆的行驶环境信息;行驶环境信息包括图像信息、第一里程信息和位置姿态信息;以及采用卡尔曼滤波对第一里程信息进行滤波得到预测的第二里程信息;将预设长度的第二里程信息利用位置姿态信息首先进行平曲线分段,在平曲线的基础上再进行竖曲线分段,确定在竖曲线分段中消除竖曲线影响距离和在平曲线分段中消除竖曲线影响距离;消除检测位置车轮里程计平曲线偏移,叠加道路中线位置估计的竖曲线偏移,在竖曲线分段中计算消除竖曲线影响车轮里程计偏移的距离;利用消除竖曲线影响车轮里程计偏移的距离调整检测桩号;提取图像信息中里程桩号,对里程桩号进行特征提取,将提取的里程桩号作为区间值,对调整后的检测桩号进行优化,用于消除测量累计误差。基于一种自动校桩方法,还提出了一种自动校桩系统和设备。本发明采用三级优化的方式,有效提升道路检测校桩准确性。
43、本发明中一级优化采用卡尔曼滤波的方式,用于过滤由于胎压、标定、测量自身产生的误差,优化了整体的行驶环境信息;在一级优化中通过缩小分布,提升优化的准确度。
44、本发明中二级优化对检测位置、车辆行驶位置与路侧桩号布设位置存在差异而进行的修正,包含了道路线形平纵曲线的影响,考虑到三维环境位置姿态的估计,同样可以逐点平移至道路中线位置。
45、本发明中三级优化对公路里程设置存在长短链,在校正校测误差后对消除测量累积误差进行优化,提升道路检测校桩准确性。
- 还没有人留言评论。精彩留言会获得点赞!