一种基于场景的辅助驾驶汽车安全性能测试评价方法与流程
本发明涉及辅助驾驶汽车测试,更具体地,涉及一种基于场景的辅助驾驶汽车安全性能测试评价方法。
背景技术:
1、随着汽车智能化技术发展,是否具备辅助驾驶功能已逐渐成为消费者在购买汽车时的重要考虑因素,因此配置辅助驾驶功能的辅助驾驶汽车渗透率也不断攀升。代表性的辅助驾驶功能包括,自适应巡航系统(acc)、自动紧急制动系统(aeb)、车道保持系统(lka)、盲区预警系统(bsd)等等,为确保辅助驾驶功能汽车的安全性能,当前主要是对各单项功能进行逐个评价。但是随着同一车辆配置的辅助驾驶功能越来越丰富,尤其是近期出现的自动导航辅助驾驶(noa),与传统辅助驾驶功能相比,具备更强大、综合的辅助驾驶能力,可为驾驶员提供自动的车道变更、超车、换道等操作。因此,有必要用一种更加系统的、综合的方式对辅助驾驶汽车运行安全进行测试评价。
技术实现思路
1、为了解决现有技术中存在的不足,本发明提供了一种基于场景的辅助驾驶汽车安全性能测试评价方法,基于辅助驾驶汽车对不同测试场景的通过性,开展运行安全测试评价。
2、作为本发明的第一个方面,提供一种基于场景的辅助驾驶汽车安全性能测试评价方法,包括以下步骤:
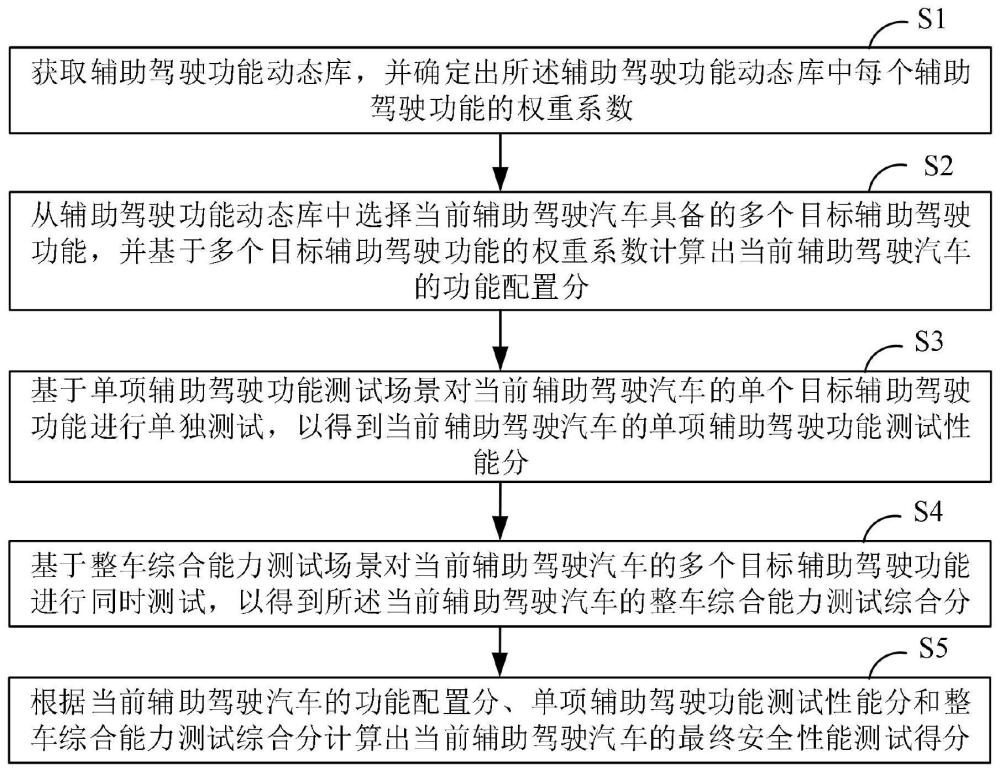
3、步骤s1:获取辅助驾驶功能动态库,并确定出所述辅助驾驶功能动态库中每个辅助驾驶功能的权重系数;
4、步骤s2:从所述辅助驾驶功能动态库中选择当前辅助驾驶汽车具备的多个目标辅助驾驶功能,并基于所述多个目标辅助驾驶功能的权重系数计算出当前辅助驾驶汽车的功能配置分;
5、步骤s3:基于单项辅助驾驶功能测试场景对所述当前辅助驾驶汽车的单个目标辅助驾驶功能进行单独测试,以得到所述当前辅助驾驶汽车的单项辅助驾驶功能测试性能分;
6、步骤s4:基于整车综合能力测试场景对所述当前辅助驾驶汽车的多个目标辅助驾驶功能进行同时测试,以得到所述当前辅助驾驶汽车的整车综合能力测试综合分;
7、步骤s5:根据所述当前辅助驾驶汽车的功能配置分、所述当前辅助驾驶汽车的单项辅助驾驶功能测试性能分和所述当前辅助驾驶汽车的整车综合能力测试综合分,计算出当前辅助驾驶汽车的最终安全性能测试得分。
8、进一步地,所述获取辅助驾驶功能动态库,并确定出所述辅助驾驶功能动态库中每个辅助驾驶功能的权重系数,还包括:
9、获取配置率排名前14的辅助驾驶功能,组成所述辅助驾驶功能动态库;其中,14个辅助驾驶功能记为(g1-g14);
10、按照所述辅助驾驶功能动态库中每个辅助驾驶功能的配置率设置其对应的配置权重;其中,14个辅助驾驶功能对应的配置权重记为(a1-a14);
11、按照所述辅助驾驶功能动态库中每个辅助驾驶功能对避免事故的贡献度设置其对应的安全权重;其中,14个辅助驾驶功能对应的安全权重记为(b1-b14);
12、根据每个辅助驾驶功能的配置权重和安全权重得到所述辅助驾驶功能动态库中每个辅助驾驶功能的权重系数;其中,每个辅助驾驶功能的权重系数记为gi(ai,bi)。
13、进一步地,所述配置率排名前14的辅助驾驶功能,由高到低为自动紧急制动g1、前碰撞预警g2、自适应巡航g3、驾驶盲区监测预警g4、自动泊车g5、车道偏离预警g6、车道保持g7、交通拥堵跟车g8、疲劳驾驶预警g9、交通信号预警g10、开门盲区预警g11、夜视功能g12、全景环视g13、安全变道辅助g14。
14、进一步地,所述从所述辅助驾驶功能动态库中选择当前辅助驾驶汽车具备的多个目标辅助驾驶功能,并基于所述多个目标辅助驾驶功能的权重系数计算出当前辅助驾驶汽车的功能配置分,还包括:
15、构建当前辅助驾驶汽车的辅助驾驶功能矩阵g,辅助驾驶功能矩阵g表示为:
16、g=[g1 g2 g3 … g14]t
17、其中,假设当前辅助驾驶汽车具备n个目标辅助驾驶功能,将辅助驾驶功能矩阵g中的n个目标辅助驾驶功能设置为1,除n个目标辅助驾驶功能之外的其他辅助驾驶功能设置为0;
18、构建所述当前辅助驾驶汽车的权重系数矩阵m,权重系数矩阵m表示为:
19、m=[a1b1 a2b2 a3b3 … a14b14]
20、则所述当前辅助驾驶汽车的功能配置分r1表示为:
21、
22、其中,gi为矩阵g中第i个辅助驾驶功能,ai为矩阵g中第i个辅助驾驶功能的配置权重,bi为矩阵g中第i个辅助驾驶功能的安全权重。
23、进一步地,所述基于单项辅助驾驶功能测试场景对所述当前辅助驾驶汽车的单个目标辅助驾驶功能进行单独测试,以得到所述当前辅助驾驶汽车的单项辅助驾驶功能测试性能分,还包括:
24、构建单项辅助驾驶功能测试场景库,所述单项辅助驾驶功能测试场景库中包括多个单项辅助驾驶功能测试场景;
25、基于每个单项辅助驾驶功能测试场景对所述当前辅助驾驶汽车的单个目标辅助驾驶功能进行单独测试,每个目标辅助驾驶功能分为测试通过、测试部分通过和测试不通过;
26、则所述当前辅助驾驶汽车的单项辅助驾驶功能测试性能分r2表示为:
27、r2=2x+1y-2z
28、其中,假设n个目标辅助驾驶功能中有x个目标辅助驾驶功能测试通过、y个目标辅助驾驶功能测试部分通过和z个目标辅助驾驶功能测试不通过。
29、进一步地,所述基于整车综合能力测试场景对所述当前辅助驾驶汽车的多个目标辅助驾驶功能进行同时测试,以得到所述当前辅助驾驶汽车的整车综合能力测试综合分,还包括:
30、构建整车综合能力测试场景库,所述整车综合能力测试场景库中包括多个整车综合能力测试场景;其中,基于每个整车综合能力测试场景对所述当前辅助驾驶汽车的多个目标辅助驾驶功能进行同时测试;
31、根据每个整车综合能力测试场景的测试完成度c、测试安全度s和测试舒适度k计算得到所述当前辅助驾驶汽车的整车综合能力测试综合分r3,假设当前辅助驾驶汽车需要m个整车综合能力测试场景进行测试,所述当前辅助驾驶汽车的整车综合能力测试综合分r3表示为:
32、
33、其中,若所述当前辅助驾驶汽车通过第j个整车综合能力测试场景的测试,则第j个整车综合能力测试场景的测试完成度cj为1;若所述当前辅助驾驶汽车未通过第j个整车综合能力测试场景的测试,则第j个整车综合能力测试场景的测试完成度cj为0;根据第j个整车综合能力测试场景测试时的加速度得到第j个整车综合能力测试场景的测试安全度sj,根据第j个整车综合能力测试场景测试时的加速度变化率得到第j个整车综合能力测试场景的测试舒适度kj。
34、进一步地,所述根据所述当前辅助驾驶汽车的功能配置分、所述当前辅助驾驶汽车的单项辅助驾驶功能测试性能分和所述当前辅助驾驶汽车的整车综合能力测试综合分,计算出当前辅助驾驶汽车的最终安全性能测试得分,还包括:
35、所述当前辅助驾驶汽车的最终安全性能测试得分r的计算公式为:
36、
37、其中,q、p、l分别为功能配置分r1的权重、单项辅助驾驶功能测试性能分r2的权重、整车综合能力测试综合分r3的权重。
38、本发明提供的一种基于场景的辅助驾驶汽车安全性能测试评价方法具有以下优点:结合单项功能测试和整车综合能力测试,可以对辅助驾驶汽车安全性能开展整车地、综合地测试评价。
- 还没有人留言评论。精彩留言会获得点赞!