刚柔耦合的行星齿轮和转子系统动力学建模方法
本发明涉及动力学建模,具体而言,尤其涉及一种刚柔耦合的行星齿轮和转子系统动力学建模方法。
背景技术:
1、行星齿轮作为一种常见的传动机构被广泛应用于各种机械系统中,其动力学建模则是理解其工作原理和设计优化的基础。
2、相较于集中质量模型法,刚柔耦合动力学模型能够考虑行星齿轮系统柔性部件的影响,通常包括柔性齿圈和柔性行星架,从而更准确地描述实际工程系统的动态响应。
3、有鉴于此,本发明提供一种刚柔耦合的行星齿轮和转子系统动力学建模方法。
技术实现思路
1、根据上述提出现有技术的动力学建模的缺陷,而提供一种刚柔耦合的行星齿轮和转子系统动力学建模方法。本发明主要通过建立齿圈单元模型、建立输入轴和行星架的有限元模型、建立太阳轮和行星轮啮合模型、建立行星轮和齿圈啮合模型,最后将这些模型耦合得到行星齿轮系统动力学模型,既考虑了输入轴、行星架和齿圈的柔性,又计入了齿轮啮合和行星轮公转的影响。
2、本发明采用的技术手段如下:
3、本发明提供一种刚柔耦合的行星齿轮和转子系统动力学建模方法,包括:
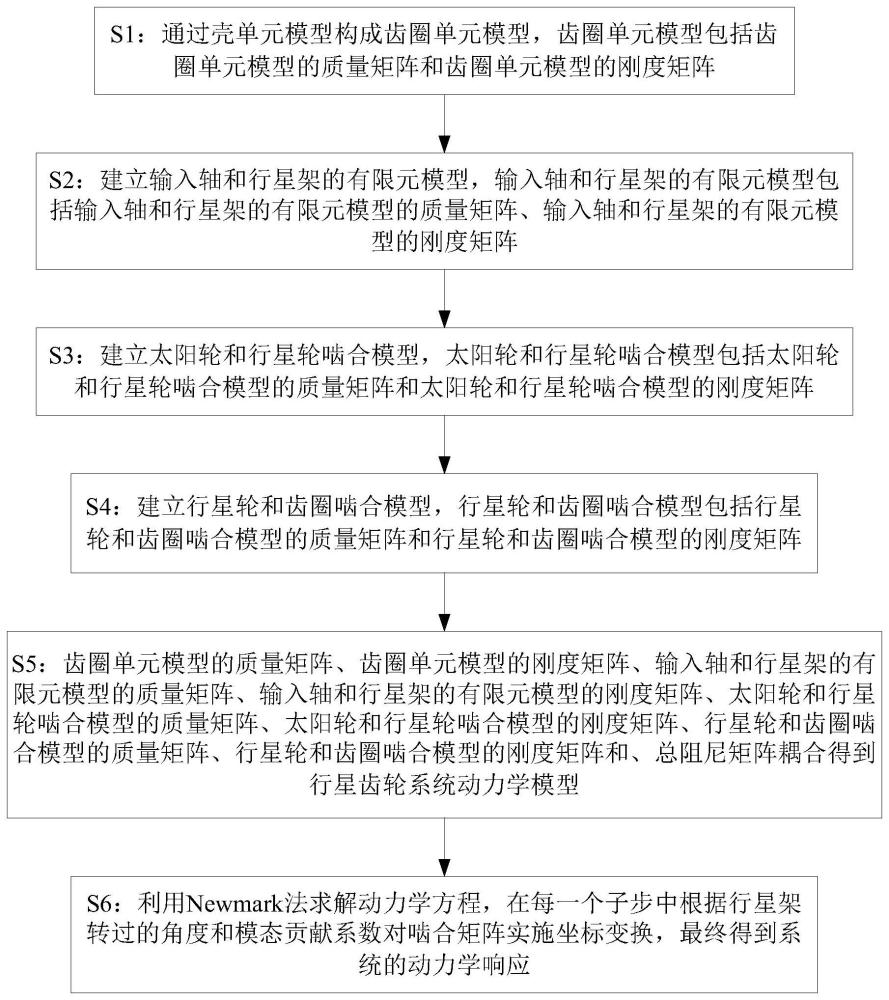
4、通过壳单元模型构成齿圈单元模型,所述齿圈单元模型包括所述齿圈单元模型的质量矩阵和所述齿圈单元模型的刚度矩阵;
5、建立输入轴和行星架的有限元模型,所述输入轴和行星架的有限元模型包括所述输入轴和行星架的有限元模型的质量矩阵、所述输入轴和行星架的有限元模型的刚度矩阵;
6、建立太阳轮和行星轮啮合模型,所述太阳轮和行星轮啮合模型包括所述太阳轮和行星轮啮合模型的质量矩阵和所述太阳轮和行星轮啮合模型的刚度矩阵;
7、建立行星轮和齿圈啮合模型,所述行星轮和齿圈啮合模型包括所述行星轮和齿圈啮合模型的质量矩阵和所述行星轮和齿圈啮合模型的刚度矩阵;
8、所述齿圈单元模型的质量矩阵、所述齿圈单元模型的刚度矩阵、所述输入轴和行星架的有限元模型的质量矩阵、所述输入轴和行星架的有限元模型的刚度矩阵、所述太阳轮和行星轮啮合模型的质量矩阵、所述太阳轮和行星轮啮合模型的刚度矩阵、所述行星轮和齿圈啮合模型的质量矩阵、所述行星轮和齿圈啮合模型的刚度矩阵、总阻尼矩阵耦合得到行星齿轮系统动力学模型;
9、利用newmark法求解动力学方程,在每一个子步中根据行星架转过的角度和模态贡献系数对啮合矩阵实施坐标变换,最终得到系统的动力学响应。
10、进一步地,在耦合前,对所述质量矩阵和所述刚度矩阵进行缩维处理,按照以下方式计算:
11、
12、
13、其中,为缩维后的所述质量矩阵,m为所述质量矩阵,为缩维后的所述刚度矩阵,k为所述刚度矩阵,s为转换矩阵。
14、进一步地,所述总阻尼矩阵,按照以下方式计算:
15、
16、
17、
18、其中,c为所述总阻尼矩阵,cα为与质量相关的瑞丽阻尼系数,cβ为与刚度相关的瑞丽阻尼系数,cspi为所述太阳轮和行星轮啮合模型的阻尼矩阵,cspi为所述太阳轮和行星轮啮合模型的阻尼系数,cpri为所述行星轮和齿圈啮合模型的阻尼矩阵,cpri为所述行星轮和齿圈啮合模型的阻尼系数,vspi和vpri为投影向量,m’为所述质量矩阵的组合集,k’为所述刚度矩阵的组合集。
19、进一步地,所述壳单元模型的质量矩阵,按照以下方式计算:
20、
21、其中,为所述壳单元模型的质量矩阵,ρ为所述齿圈的密度,n为单元形函数,j为雅克比矩阵,ξ、η、ζ为所述壳单元模型的参数坐标。
22、进一步地,所述壳单元模型的刚度矩阵,按照以下方式计算:
23、
24、其中,为所述壳单元模型的刚度矩阵,b为应变矩阵,d为本构矩阵,j为雅克比矩阵,ξ、η、ζ为所述壳单元模型的参数坐标。
25、进一步地,所述建立输入轴和行星架的有限元模型,包括:
26、获取输入轴和行星架的几何图纸,将所述几何图纸输入有限元分析软件,所述有限元分析软件输出所述输入轴和行星架的有限元模型的质量矩阵和所述输入轴和行星架的有限元模型的刚度矩阵。
27、进一步地,所述太阳轮和行星轮啮合模型的刚度矩阵,按照以下方式计算:
28、
29、其中,kspi为所述太阳轮和行星轮啮合模型的刚度矩阵,kspi为太阳轮和行星轮啮合刚度,vspi为第i个太阳轮和行星轮的齿轮副沿啮合线的投影向量。
30、进一步地,所述行星轮和齿圈啮合模型的刚度矩阵,按照以下方式计算:
31、
32、其中,kpri为所述行星轮和齿圈啮合模型的刚度矩阵,kpri为行星轮和齿圈啮合刚度,vpri为第i个行星轮和齿圈的齿轮副沿啮合线的投影向量。
33、较现有技术相比,本发明具有以下优点:
34、本发明提供的刚柔耦合的行星齿轮和转子系统动力学建模方法,通过壳单元构成齿圈单元模型、建立输入轴和行星架的有限元模型、建立太阳轮和行星轮啮合模型、建立行星轮和齿圈啮合模型,最后将这些模型耦合得到行星齿轮系统动力学模型,既考虑了输入轴、行星架和齿圈的柔性,又计入了齿轮啮合和行星轮公转的影响,整个方法的计算效率高,弥补了现阶段考虑柔性齿圈及行星轮公转刚柔耦合的行星齿轮和转子系统动力学建模的空缺,可为传动系统的优化设计和振动控制提供理论依据。
技术特征:
1.一种刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,包括:
2.根据权利要求1所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,在耦合前,对所述质量矩阵和所述刚度矩阵进行缩维处理,按照以下方式计算:
3.根据权利要求2所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,所述总阻尼矩阵,按照以下方式计算:
4.根据权利要求1或2所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,所述壳单元模型的质量矩阵,按照以下方式计算:
5.根据权利要求1或2所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,所述壳单元模型的刚度矩阵,按照以下方式计算:
6.根据权利要求1或2所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,所述建立输入轴和行星架的有限元模型,包括:
7.根据权利要求1或2所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,所述太阳轮和行星轮啮合模型的刚度矩阵,按照以下方式计算:
8.根据权利要求1或2所述的刚柔耦合的行星齿轮和转子系统动力学建模方法,其特征在于,所述行星轮和齿圈啮合模型的刚度矩阵,按照以下方式计算:
技术总结
本发明提供一种刚柔耦合的行星齿轮和转子系统动力学建模方法,包括:通过壳单元模型构成齿圈单元模型;建立输入轴和行星架的有限元模型;建立太阳轮和行星轮啮合模型;建立行星轮和齿圈啮合模型;齿圈单元模型、输入轴和行星架的有限元模型、太阳轮和行星轮啮合模型和行星轮和齿圈啮合模型耦合得到行星齿轮系统动力学模型,既考虑了输入轴、行星架和齿圈的柔性,又计入了齿轮啮合和行星轮公转的影响。
技术研发人员:马辉,田洪旭,刘宁,李鑫,韩清凯,罗忠,孙伟,李晖
受保护的技术使用者:东北大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!