基于改进Canny算法的交通标线边缘连接方法与流程
本发明涉及图像处理算法领域,具体来说,涉及基于改进canny算法的交通标线边缘连接方法。
背景技术:
1、道路交通标线是指使用计算机视觉技术,通过对道路交通场景中的图像或视频进行处理和分析,自动识别道路上的各种交通标线,如车道线、人行横道线、禁止标志等,并将其转化为计算机可读的数据。道路交通标线识别在自动驾驶、交通管理、智能交通系统等领域具有重要性。
2、canny算法于1986年被提出,是一种经典的多级边缘检测算法,与传统的道路交通标线识别算法相比,具有高精度、低误检率、实现简单、适用范围广的优点。canny算法能够检测出图像中的边缘,并将其表示为一组连续的像素点,canny算法在图像处理领域中被广泛应用,可以用于目标检测、图像分割、图像识别等领域。
3、然而,canny算法涉及步骤较多,需要的计算量也大,尤其是在处理大尺寸的图像时,执行时间会较长,同时,在进行边缘连接时有可能会出现图像断裂或增加噪声的现象,导致算法鲁棒性较差。
4、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出基于改进canny算法的交通标线边缘连接方法,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
3、基于改进canny算法的交通标线边缘连接方法,该基于改进canny算法的交通标线边缘连接方法包括以下步骤:
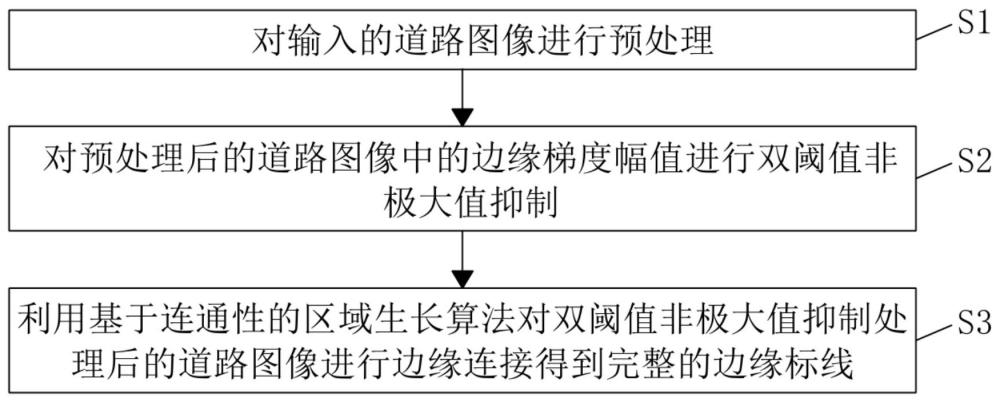
4、s1、对输入的道路图像进行预处理;
5、s2、对预处理后的道路图像中的边缘梯度幅值进行双阈值非极大值抑制;
6、s3、利用基于连通性的区域生长算法对双阈值非极大值抑制处理后的道路图像进行边缘连接得到完整的边缘标线。
7、可选地,对输入的道路图像进行预处理包括以下步骤:
8、s11、获取输入的道路图像,并利用灰度转换公式将道路图像中的彩色图像转换为灰度图像;
9、s12、利用积分图像算法对转换后的灰度图像进行高斯滤波处理;
10、s13、利用roberts算子对高斯滤波处理后的灰度图像中的梯度幅值和梯度方向进行计算。
11、可选地,灰度转换公式为:
12、
13、式中,gray为灰度转换值;
14、r为像素点在红通道的数值;
15、g为像素点在绿通道的数值;
16、b为像素点在蓝通道的数值。
17、可选地,利用积分图像算法对转换后的灰度图像进行高斯滤波处理包括以下步骤:
18、s121、对转换后的灰度图像进行逐行逐列累加,得到每个像素点的积分图像;
19、s122、利用积分图像算法对积分图像中任意矩形区域的像素值之和进行计算,并计算积分图像的均值;
20、s123、通过计算积分图像的像素值与其周围像素值的加权平均值来实现高斯滤波。
21、可选地,利用roberts算子对高斯滤波处理后的灰度图像中的梯度幅值和梯度方向进行计算包括以下步骤:
22、s131、获取高斯滤波处理后的灰度图像,并进行roberts算子卷积操作,计算灰度图像中每个像素点的水平梯度值和垂直梯度值;
23、s132、根据水平梯度值和垂直梯度值计算当前像素点的梯度幅值和梯度方向。
24、可选地,水平梯度值的计算公式为:
25、
26、垂直梯度值的计算公式为:
27、
28、梯度幅值的计算公式为:
29、
30、梯度方向的计算公式为:
31、
32、式中,为当前像素点的水平梯度值;
33、为当前像素点的垂直梯度值;
34、为原始图像在像素点处的灰度值;
35、为原始图像在像素点处的灰度值;
36、为原始图像在像素点处的灰度值;
37、为原始图像在像素点处的灰度值。
38、可选地,对预处理后的道路图像中的边缘梯度幅值进行双阈值非极大值抑制包括以下步骤:
39、s21、获取每个像素点的梯度幅值,并设置高阈值t1、低阈值t2和抑制后的像素点;
40、s22、判断每个像素点的梯度幅值,若梯度幅值大于低阈值t2,则表示该像素点为强边缘像素点;
41、若梯度幅值大于高阈值t1,并小于等于低阈值t2,则表示该像素点为中间边缘像素点;
42、若梯度幅值小于等于高阈值t1,则表示该像素点为非边缘像素点;
43、s23、对所有强边缘像素点进行非极大值抑制操作,抑制掉非最大值的像素点。
44、可选地,利用基于连通性的区域生长算法对双阈值非极大值抑制处理后的道路图像进行边缘连接得到完整的边缘标线包括以下步骤:
45、s31、在强边缘像素点和中间边缘像素点之间选择若干像素点为种子点;
46、s32、利用基于连通性的区域生长算法对种子点进行相邻的边缘像素点连接,形成连续的边缘线;
47、s33、利用基于距离的合并法将相邻的边缘线进行合并,得到合并后的边缘线;
48、s34、利用优化算法对合并后的边缘线进行优化处理,得到完整的边缘标线。
49、可选地,利用基于距离的合并法将相邻的边缘线进行合并,得到合并后的边缘线包括以下步骤:
50、s331、将所有的像素点按照距离从小到大排序,并利用距离、角度和曲率将相邻的边缘像素点合并成边缘线;
51、s332、将合并后的边缘线进行标记;
52、s333、重复步骤s331-s332,直到将所有的边缘像素点都合并为一条或多条连续的边缘线。
53、可选地,优化算法包括曲线拟合、线段拟合、曲线平滑中的任意一种。
54、本发明的有益效果为:
55、1、本发明通过提出基于改进canny算法的道路交通标线识别算法,采用积分图像来进行高斯滤波从而优化高斯滤波的计算,可以减少滤波器的计算量,加快处理速度,并使用连通性的区域生长算法进行边缘连接,可以更好的处理图像中的断裂和噪声,从而增强算法的鲁棒性。
56、2、本发明通过优化高斯滤波过程,改进了canny算法,其中,积分图像法的应用减少了滤波操作的计算复杂性,从而提高了滤波流程的速度;使得在图像处理中,特别是对于实时或快速响应要求高的应用,算法可以更迅速地处理图像数据,对于实现快速的道路检测和交通监控具有重要意义。
57、3、本发明使用连通性算法进行边缘连接有助于减少误报和漏报的情况发生,连通性算法能够将相邻的边缘像素连接起来,形成更连续和完整的边缘线,提高了道路检测的准确性,通过确保边缘之间的连续性,算法能够准确地识别道路边缘的位置和形状,使得自动驾驶系统或交通监控能够更可靠地感知道路的几何结构和障碍物的位置,从而帮助系统做出准确的决策和规划,提高行驶安全性和效率。
58、4、本发明通过改进canny算法和引入连通性算法,提高了算法的鲁棒性,使其在各种环境条件下都能保持稳定的性能,即使在光线变化较大或天气条件不佳的情况下,算法仍能准确地检测和提取图像中的边缘信息,有助于适应现实世界中多样化的道路和交通情况,提高了交通监控、驾驶辅助系统等领域的可靠性和效果。
- 还没有人留言评论。精彩留言会获得点赞!