辅助驾驶显示方法、系统及电子设备与流程
本发明涉及辅助驾驶开发,具体地说,尤其涉及一种辅助驾驶显示方法,此外,本发明还涉及一种辅助驾驶显示系统和电子设备。
背景技术:
1、当前座舱项目中所应用到的软件系统日渐复杂,作为汽车智能化的关键功能之一,高级驾驶辅助系统被越来越多的应用到整车系统中,作为驾驶员的感官拓展,通常需要将周围的目标物位置状态放在以仪表为主的车内显示屏中,方便驾驶员实时查看,为还原车外的目标物与自车之间的位置关系,市面中的高端产品通常使用3d立体模型渲染的方式显示,这对于算力资源占用较高,对于处理器的性能要求也较高,不利于一些低性能或低端平台产品实施。
2、因此,如何提供一种辅助驾驶显示方法,在保证显示准确度的前提下,提供高效精简的显示方案,降低整体系统运算负载,已经成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、为解决上述技术问题,本发明提供一种辅助驾驶显示方法,在保证显示准确度的前提下,提供高效精简的显示方案,降低整体系统运算负载,相比于当前市场中普遍存在的显示方案,本方案通过采用2d平面模拟代替3d渲染的方式大幅度降低了对处理器的图形渲染能力要求;同时,因为建模算法的连续性,使得界面显示效果优于常见的分段式2d显示方案,更符合中低成本产品的辅助驾驶画面流畅实现。此外,本发明还提供一种辅助驾驶显示系统和电子设备,同样具有上述有益效果。
2、本发明提供的技术方案如下:
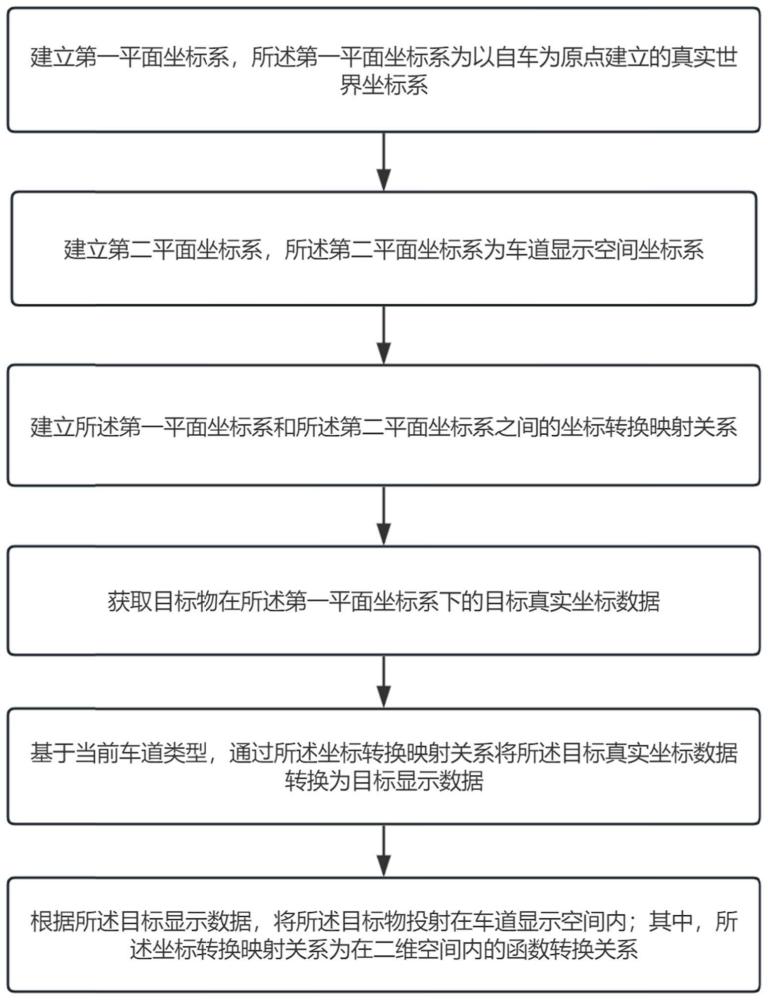
3、本发明提供一种辅助驾驶显示方法,该方法包括以下步骤:建立第一平面坐标系,所述第一平面坐标系为以自车为原点建立的真实世界坐标系;建立第二平面坐标系,所述第二平面坐标系为车道显示空间坐标系;建立所述第一平面坐标系和所述第二平面坐标系之间的坐标转换映射关系;获取目标物在所述第一平面坐标系下的目标真实坐标数据;基于当前车道类型,通过所述坐标转换映射关系将所述目标真实坐标数据转换为目标显示数据,所述目标显示数据包括目标显示大小数据、目标显示坐标数据;根据所述目标显示数据,将所述目标物投射在车道显示空间内;其中,所述坐标转换映射关系为在二维空间内的函数转换关系。
4、进一步地,在本发明一种优选的方式中,所述“基于当前车道类型,通过所述坐标转换映射关系将所述目标真实坐标数据转换为目标显示数据”具体包括以下步骤:
5、目标物显示大小处理:基于当前车道类型,根据所述目标真实坐标数据中目标物的远近距离输出所述目标显示大小数据;
6、目标物显示位置处理:基于当前车道类型,将所述目标真实坐标数据基于所述坐标转换映射关系生成目标显示坐标数据。
7、进一步地,在本发明一种优选的方式中,所述“基于当前车道类型,根据所述目标真实坐标数据中目标物的远近距离输出所述目标显示大小数据”包括以下步骤:
8、以所述第二平面坐标系为基准,从最近的(0,0)点到最远(0,ymax)点之间,将所述车道显示空间划分为n个图标显示区间,n为1-100;
9、获取当前目标物的远近距离数据,匹配当前目标物的所述图标显示区间;
10、将当前目标物的目标显示图像在图标显示区间中进行显示。
11、进一步地,在本发明一种优选的方式中,所述“将当前目标物的目标显示图像在图标显示区间中进行显示”具体包括以下步骤:
12、根据当前目标物的远近距离数据,按比例调整目标显示图像在所述图标显示区间的大小。
13、进一步地,在本发明一种优选的方式中,所述“基于当前车道类型,将所述目标真实坐标数据基于所述坐标转换映射关系生成目标显示坐标数据”还包括以下步骤:
14、识别当前车道类型,若所述当前车道类型为直道,则根据所述坐标转换映射关系,生成目标显示坐标数据;
15、若所述当前车道类型为弯道,则结合弯道参照距离数值,根据所述坐标转换映射关系,生成目标显示坐标数据。
16、进一步地,在本发明一种优选的方式中,所述“根据所述坐标转换映射关系,生成目标显示坐标数据”包括以下步骤:
17、在第一平面坐标系下,设定目标物的目标真实坐标数据记为(x真,y真);
18、在第二平面坐标系下,设定目标物的目标显示坐标数据记为(x显,y显);
19、建立x真和x显在横向尺度上的显示数值映射如下:
20、x显=a·b·x真 公式(1)
21、其中,a为真实坐标数值在第二平面坐标系的原点处的尺度比例系数;
22、b为显示x值随着纵向y的变化而变化的系数,b计算公式为:
23、b=(m-n·y真) 公式(2)
24、其中,m和n根据车道显示空间的画面布局需要进行调整,从而影响整个显示尺度内的变化效率;
25、根据公式1与公式2,得到第二平面坐标系下,x显的计算公式如下:
26、x显=a·(m-n·y真)·x真 公式(3)
27、其中,所述x显是第二平面坐标系下,目标物的横向尺度的坐标映射;
28、建立y真和y显在纵向尺度上的显示数值映射如下:
29、
30、其中,k为调整尺度变化率的正数系数;
31、因此,所述第一平面坐标系和所述第二平面坐标系之间的坐标转换映射关系如下:
32、
33、其中,通过系数a,m,n,k来调整控制车道显示空间显示区域的效果。
34、进一步地,在本发明一种优选的方式中,所述“结合弯道参照距离数值,根据所述坐标转换映射关系,生成目标显示坐标数据”具体包括以下步骤:
35、获取弯道参照距离数值,识别得到目标物远近距离记为(x物,y物),在第一坐标系的y向上,设定目标物与自车行径路径在弯道延长线的交点坐标记为(x线,y线),可知y线=y物;
36、在第一平面坐标系根据几何关系得到求得x线;
37、所述弯道参照距离数值为(x物,y物)与(x线,y线)之间的距离;
38、根据所述弯道参照距离数值通过坐标转换映射关系,生成目标显示坐标数据。
39、进一步地,在本发明一种优选的方式中,所述“在第一平面坐标系根据几何关系得到求得x线”具体包括以下步骤:
40、获取自车到参考车道线的横向距离x线距,
41、识别得到参考车道线的拟合曲率半径r;
42、根据以下函数得到
43、
44、其中,x线的正负号用于表示相对自车原点的左右位置,x线距的正负号用于标识所选择的车道线,相对于车身中轴线的左右位置。
45、此外,本发明还提供一种辅助驾驶显示系统,该系统执行权利要求1至8中任意一项所述的辅助驾驶显示方法;该系统包括:
46、第一空间模块,所述第一空间模块用于建立第一平面坐标系;
47、第二空间模块,所述第二空间模块用于建立第二平面坐标系;
48、第一计算模块,所述第一计算模块用于建立所述第一平面坐标系和所述第二平面坐标系之间的坐标转换映射关系;
49、第一获取模块,所述第一获取模块用于获取目标物在所述第一平面坐标系下的目标真实坐标数据;
50、第一分析模块,所述第一分析模块用于基于当前车道类型,通过所述坐标转换映射关系将所述目标真实坐标数据转换为目标显示数据;
51、第一显示模块,所述第一显示模块用于根据所述目标显示数据,将所述目标物投射在车道显示空间内。
52、此外,本发明还涉及一种电子设备,其特征在于,包括:
53、计算机程序,所述计算机程序用于执行如上所述的辅助驾驶显示方法;
54、存储器,所述存储器用于存储所述计算机程序;
55、处理器,所述处理器用于执行所述计算机程序。
56、本发明提供的一种辅助驾驶显示方法,与现有技术相比,包括:建立第一平面坐标系,所述第一平面坐标系为以自车为原点建立的真实世界坐标系;建立第二平面坐标系,所述第二平面坐标系为车道显示空间坐标系;建立所述第一平面坐标系和所述第二平面坐标系之间的坐标转换映射关系;获取目标物在所述第一平面坐标系下的目标真实坐标数据;基于当前车道类型,通过所述坐标转换映射关系将所述目标真实坐标数据转换为目标显示数据,所述目标显示数据包括目标显示大小数据、目标显示坐标数据;根据所述目标显示数据,将所述目标物投射在车道显示空间内;其中,所述坐标转换映射关系为在二维空间内的函数转换关系,相较于现有技术而言,本方案在保证显示准确度的前提下,提供高效精简的显示方案,降低整体系统运算负载,相比于当前市场中普遍存在的显示方案,本方案通过采用2d平面模拟代替3d渲染的方式大幅度降低了对处理器的图形渲染能力要求;同时,因为建模算法的连续性,使得界面显示效果优于常见的分段式2d显示方案,更符合中低成本产品的辅助驾驶画面流畅实现。此外,本发明还提供一种辅助驾驶显示系统和电子设备,同样具有上述有益效果。
- 还没有人留言评论。精彩留言会获得点赞!