智能道闸真伪车牌的识别检测方法、装置、设备以及介质与流程
本发明涉及车牌识别的,尤其是涉及一种智能道闸真伪车牌的识别检测方法、装置、设备以及介质。
背景技术:
1、随着科技和经济发展,越来越多的普通家庭都开始购买汽车,以提高家庭成员的生活质量,汽车保有量也越来越大。因此,需要修建更多的停车场来满足大量汽车的停车需求。传统停车场一般都会安排工作人员在出入口对车辆的进出进行管理,但是停车场的出入管理工作较为简单,且停车场的数量也多,若每个停车场都配备工作人员,将会造成劳动成本的浪费。因此,相关企业研发生产出取代人工的停车场智能道闸,通过智能道闸对车辆的进出进行管理,大大提高了管理效率并节省了劳动成本。
2、但是,有的车主为了逃避收费,会使用假车牌或着对车牌进行改装,这样车辆进出的车牌不一致,相关技术中,智能道闸识别出伪造假冒的车牌的正确率较低,识别错误时会造成无法对车辆停车进行计时收费的情况,进而使得车辆能够不交停车费但却自由进出停车场,对停车场造成损失,并对停车场的管理造成困扰。
技术实现思路
1、为了提高道闸识别出伪造假冒的车牌的正确率,本技术提供一种智能道闸真伪车牌的识别检测方法、装置、设备以及介质。
2、第一方面,本技术的上述发明目的是通过以下技术方案得以实现的:
3、一种智能道闸真伪车牌的识别检测方法,所述智能道闸真伪车牌的识别检测方法包括:
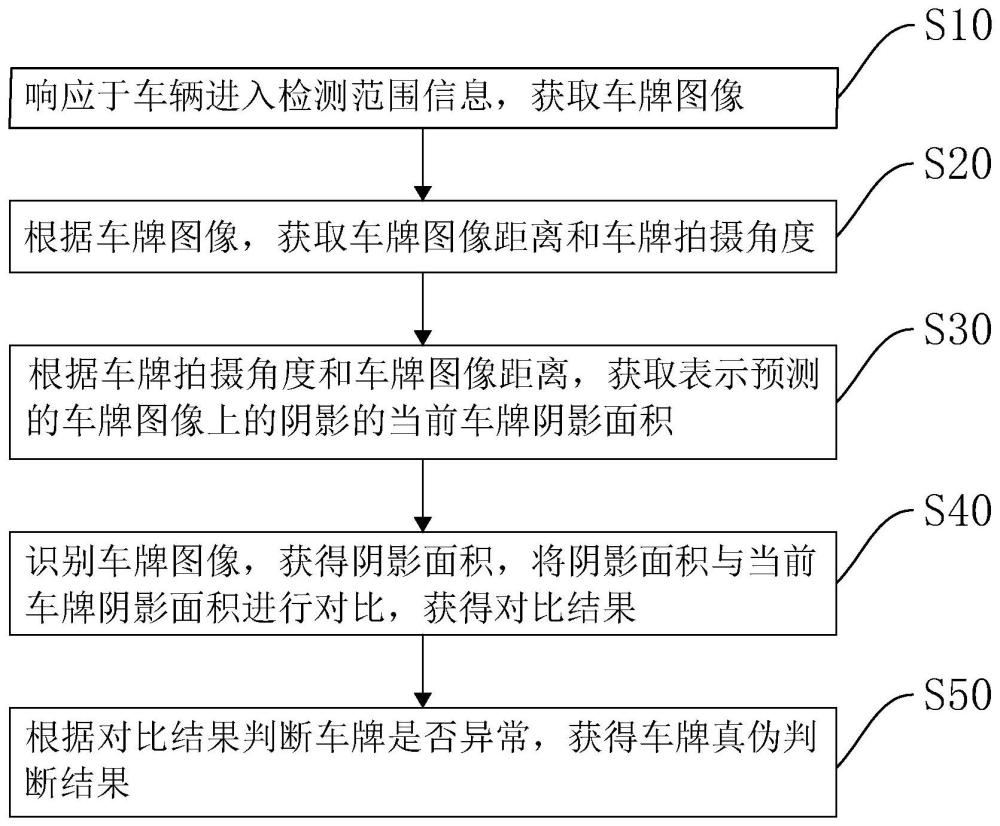
4、响应于车辆进入检测范围信息,获取车牌图像;
5、根据所述车牌图像,获取车牌图像距离和车牌拍摄角度;
6、根据所述车牌拍摄角度和所述车牌图像距离,获取表示预测的车牌图像上的阴影的当前车牌阴影面积;
7、识别所述车牌图像,获得阴影面积,将所述阴影面积与所述当前车牌阴影面积进行对比,获得对比结果;
8、根据对比结果判断车牌是否异常,获得车牌真伪判断结果。
9、通过采用上述技术方案,一般车主逃避停车费的方法是使用伪造假冒的车牌放置在道闸的摄像头前方,例如,手绘车牌、纸质车牌和电子显示屏车牌图像,若道闸识别摄像头所拍摄的图像中的字符,则会被此种方式欺骗,因此,当车辆进入智能道闸的识别范围后,智能道闸上的高清摄像头拍摄车牌图像,并且获取智能道闸上的摄像头与车牌之间的距离和角度,根据车牌拍摄角度和车牌图像距离,以及所识别的车牌类型上的凹凸处,预测车牌上会形成的阴影区域,并与识别所得的车牌图像上的阴影面积进行对比,类似手绘车牌、纸质车牌和电子显示屏车牌图像等伪造车牌,难以复刻出真实车牌上的凹凸处,也就难以伪造出有真实阴影效果的车牌,因此,通过车牌拍摄角度和车牌图像距离判断车牌上的阴影,进而判断道闸所拍摄识别的车牌图像是否为正常情况光影情况下的图像,从而提高了道闸识别出伪造假冒的车牌的正确率。
10、本技术在一较佳示例中可以进一步配置为:在所述根据所述车牌拍摄角度和所述车牌图像距离,获取表示预测的车牌图像上的阴影的当前车牌阴影面积之前,所述智能道闸真伪车牌的识别检测方法还包括:
11、判断所述车牌图像距离是否在预设的异常范围内,若判断为否,则判定车牌异常;
12、若判断为是,则判定车牌距离正常。
13、通过采用上述技术方案,在判断车牌的阴影面积之前,先判断所拍摄的车牌图像上的车牌与道闸上的摄像头之间的距离,判断车牌图像距离是否在预设的异常范围内,若车牌图像距离在预设的异常范围内,则判断此时的车牌距离道闸上的摄像头的距离过近,而正常行驶的车辆上的车牌与道闸上的摄像头的距离不会小于预设的异常范围,此时道闸上的摄像头所拍摄的车牌图像很有可能是人为放置在道闸上的摄像头前的,因此,判断车牌图像距离是否存在异常,以此在进行深度识别判断前,先行判断车牌距离是否异常,提升了识别检测的效率,且避免了资源的浪费。
14、本技术在一较佳示例中可以进一步配置为:在所述若判断为是,则判断车牌初步正常之后,所述根据所述车牌拍摄角度和所述车牌图像距离,获取表示预测的车牌图像上的阴影的当前车牌阴影面积之前,所述智能道闸真伪车牌的识别检测方法还包括:
15、根据所述车牌图像距离和所述车牌拍摄角度,生成用于判断车牌形状是否变形的车牌形状框架信息;
16、将所述车牌图像与所述车牌形状框架信息进行对比,获得车牌框架偏离值信息;
17、若所述车牌框架偏离值信息大于预设的车牌框架偏离阈值,则判定车牌异常;
18、若所述车牌框架偏离值信息小于预设的车牌框架偏离阈值,则判定车牌形状正常。
19、通过采用上述技术方案,对所拍摄的车牌图像进行初略的识别,判断在整体的车牌图像中车牌的位置,并根据车牌图像距离和车牌拍摄角度,生成在该距离和角度下,正常行驶的车辆上的车牌的形状框架,即车牌的形状轮廓,并将所生成的车牌形状框架与车牌图像上的车牌进行对比,判断车牌图像上的车牌与生成的车牌形状框架的偏差,若车牌图像上的车牌与生成的车牌形状框架的偏差大于预设的车牌框架偏离阈值,则判断车牌是属于变形至难以识别车牌号码的程度,则判定该车牌是异常的。基于此,在进行深度识别判断前,进一步判断车牌距离是否异常,从而进一步提升了识别检测的效率,并避免了资源的浪费。
20、本技术在一较佳示例中可以进一步配置为:所述根据所述车牌拍摄角度和所述车牌图像距离,获取表示预测的车牌图像上的阴影的当前车牌阴影面积,具体包括:
21、实时获取外界环境信息,根据所述外界环境信息,获取用于调整车牌阴影面积的环境系数;
22、根据所述车牌拍摄角度和所述车牌图像距离,获取表示预测的车牌图像上的阴影的车牌阴影面积;
23、根据所述环境系数调整所述车牌阴影面积,获得当前车牌阴影面积。
24、通过采用上述技术方案,道闸的安装地点的外界环境对道闸识别车牌会产生一定的负面影响,例如,浓雾和雨雪天气会导致道闸上的摄像头的识别能见度降低且会导致车牌上的阴影面积减少,以及光照充足且光线正对车牌时会导致车牌上的阴影面积减少等,因此,获取外界环境信息,其中包括外界天气情况和外界灯源光照情况,根据外界环境信息对应调整预测的车牌上会形成的阴影区域面积,使得所预测的车牌上会形成的阴影区域面积更加准确,从而提高道闸识别出伪造假冒的车牌的正确率。
25、本技术在一较佳示例中可以进一步配置为:所述识别所述车牌图像,获得阴影面积,将所述阴影面积与所述当前车牌阴影面积进行对比,获得对比结果,具体包括:
26、识别所述车牌图像,获得阴影面积、高光面积和反光亮点面积;
27、根据所述环境系数、所述车牌拍摄角度和所述车牌图像距离,获取表示预测的当前车牌图像上的高光的当前车牌高光面积,以及表示预测的当前车牌图像上的反光亮点的当前车牌反光亮点面积;
28、分别将所述阴影面积、所述高光面积和所述反光亮点面积与对应的所述当前车牌阴影面积、所述当前车牌高光面积和所述当前车牌反光亮点面积进行对比,获得对比结果。
29、通过采用上述技术方案,除了阴影,受到光照时,车牌上还可能会出现高光部分和反光亮点部分,因此,除了获取预测的车牌上会形成的阴影区域面积,再获取预测的车牌上会形成的高光区域面积和反光亮点区域面积,将车牌图像上的阴影面积、高光面积和反光亮点面积分别与对应的预测的车牌上会形成的阴影区域面积、高光区域面积和反光亮点区域面积进行对比,从而进一步提高道闸识别出伪造假冒的车牌的正确率。
30、本技术在一较佳示例中可以进一步配置为:在所述根据对比结果判断车牌是否异常,获得车牌真伪判断结果之后,所述智能道闸真伪车牌的识别检测方法还包括:
31、识别所述车牌图像,获取车牌信息;
32、从预设的车牌信息数据库中获取对应所述车牌信息的表示车牌上的容易进行篡改的区域的易变更车牌区域信息;
33、将所述车牌图像上对应所述易变更车牌区域信息的部分进行放大处理,获得易变更车牌区域放大信息;
34、识别所述易变更车牌区域放大信息,判断所述易变更车牌区域放大信息是否异常,获得判断结果;
35、根据所述判断结果更新所述车牌真伪判断结果。
36、通过采用上述技术方案,一般车主逃避停车费的方法除了使用手绘车牌、纸质车牌和电子显示屏车牌图像等伪造假冒的车牌放置在道闸的摄像头前方,还有可能对原始的真实车牌进行改装,改变车牌上某一个字符,从而达到伪造车牌的效果。因此,对于在车牌上出现的所有字符中容易篡改的字符,判断容易篡改的字符的容易篡改的部分并生成车牌信息数据库,例如,阿拉伯数字3和8容易实现互相变换篡改,容易篡改的部分在阿拉伯数字3和8的左半部分判断容易进行篡改的字符,道闸识别检测车牌时,识别车牌上的字符,并判断车牌上的字符是否对应于预设的车牌信息数据库中的字符,即判断车牌上的字符是否为容易篡改的字符,若判断车牌上的字符为容易篡改的字符,则获取预设的车牌信息数据库中对应容易篡改的字符的易变更车牌区域信息,再对车牌图像上对应该区域的图像进行放大,并对放大后的图像进行更加深入的识别,例如,识别判断易变更车牌区域的显色度等参数与车牌图像中的其他区域是否不同,或者识别易变更车牌区域的线条流畅度以及像素排布均匀度等,以此实现对易变更车牌区域的深度识别判断,进而实现对车牌图像的更进一步的识别,以提高道闸识别出伪造假冒的车牌的正确率。
37、第二方面,本技术的上述发明目的是通过以下技术方案得以实现的:
38、一种智能道闸真伪车牌的识别检测装置,所述智能道闸真伪车牌的识别检测装置包括:
39、车牌图像获取模块,用于响应于车辆进入检测范围信息,获取车牌图像;
40、车牌与摄像头角度距离获取模块,用于根据所述车牌图像,获取车牌图像距离和车牌拍摄角度;
41、当前车牌阴影面积获取模块,用于根据所述车牌拍摄角度和所述车牌图像距离,获取表示预测的车牌图像上的阴影的当前车牌阴影面积;
42、对比结果获取模块,用于识别所述车牌图像,获得阴影面积,将所述阴影面积与所述当前车牌阴影面积进行对比,获得对比结果;
43、车牌真伪判断结果获取模块,用于根据对比结果判断车牌是否异常,获得车牌真伪判断结果。
44、可选的,所述智能道闸真伪车牌的识别检测装置还包括:
45、车牌图像距离判断模块,用于判断所述车牌图像距离是否在预设的异常范围内,若判断为否,则判定车牌异常;
46、车牌图像距离判断正常模块,用于若判断为是,则判定车牌距离正常。
47、第三方面,本技术的上述发明目的是通过以下技术方案得以实现的:
48、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述智能道闸真伪车牌的识别检测方法的步骤。
49、第四方面,本技术的上述发明目的是通过以下技术方案得以实现的:
50、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述智能道闸真伪车牌的识别检测方法的步骤。
51、综上所述,本技术包括以下至少一种有益技术效果:
52、1、通过车牌拍摄角度和车牌图像距离判断车牌上的阴影,进而判断道闸所拍摄识别的车牌图像是否为正常情况光影情况下的图像,从而提高了道闸识别出伪造假冒的车牌的正确率;
53、2、在判断车牌的阴影面积之前,判断车牌图像距离是否存在异常,以此在进行深度识别判断前,先行判断车牌距离是否异常,提升了识别检测的效率,且避免了资源的浪费;
54、3、对易变更车牌区域的深度识别判断,进而实现对车牌图像的更进一步的识别,以提高道闸识别出伪造假冒的车牌的正确率。
- 还没有人留言评论。精彩留言会获得点赞!