一种基于数据分析的打桩船沉桩施工智能管控系统的制作方法
本发明涉及沉桩施工,具体涉及一种基于数据分析的打桩船沉桩施工智能管控系统。
背景技术:
1、打桩船是指用于水上打桩作业的船只,船体为钢箱型结构,在甲板的端部装有打桩架,可自由调整桩机角度以适应施打斜桩的需要。打桩船为非自航船,用推(拖)轮牵引就位。打桩船广泛应用于桥梁、码头、水利工程施工。打桩船沉桩施工是一种常见的基础施工方法,用于在水中打入桩基来支撑建筑物或其他结构。沉桩包括静力压桩、锤击沉桩和振动沉桩三种方式。
2、对于常规的沉桩施工来说,一般都会有施工风险预警功能。施工风险预警是通过检测施工过程中桩身贯入度、桩身垂直度、平面位置变化并与施工方案进行对比,当对比结果超出安全范围时,将产生施工风险预警,并将预警信息发送至后台操作人员,后台操作人员调动相关人员处理预警信息,从而保证沉桩施工过程中的安全,并减少可能出现的损失。
3、在常规的沉桩施工智能管控系统中,大多是在已经发生了施工风险的情况下向后台操作人员发出预警,后台操作人员对预警信息进行分析处理,并调整施工方案以及调动人员处理风险,这种沉桩施工智能管控系统耗费更多的人力,并且由于没有提前准备应对预警信息的方案,无法进行资源的智能调度,降低了资源的利用率。一种基于数据分析的打桩船沉桩施工智能管控系统,根据历史施工数据和实时施工数据能够实时预测施工过程中可能出现的问题,并发出相应的预警提示,降低施工风险,减少人力物力消耗,提高资源利用率。
技术实现思路
1、本发明的目的在于提供一种基于数据分析的打桩船沉桩施工智能管控系统,解决上述技术问题。
2、本发明的目的可以通过以下技术方案实现:
3、一种基于数据分析的打桩船沉桩施工智能管控系统,包括:
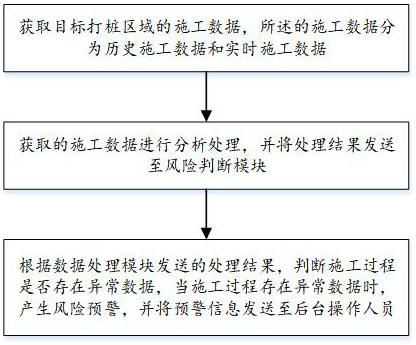
4、数据采集模块,用于获取目标打桩区域的施工数据,所述的施工数据分为历史施工数据和实时施工数据,且所述的施工数据包括桩身贯入度h、桩身垂直度r和平面位置变化l;
5、数据处理模块,用于对获取的施工数据进行分析处理,并将处理结果发送至风险判断模块;
6、风险判断模块,用于根据数据处理模块发送的处理结果,判断施工过程是否存在异常数据,所述的异常数据包括桩身贯入度异常数据、垂直度异常数据和位置变化异常数据,当施工过程存在异常数据时,产生风险预警,并将预警信息发送至后台操作人员。
7、作为本发明进一步的方案:所述的数据处理模块中包括桩身贯入度误差设定单元,在所述的桩身贯入度误差设定单元中,执行以下步骤:
8、在所述的数据处理模块中,获取历史施工数据中m根预制桩在施工过程中的桩身贯入度数据,所述施工过程为一根预制桩从开始沉桩到沉桩完成的过程,按照时间轴方向将所述的施工过程划分为若干段,每一段的时间跨度为单位时间t;
9、计算m根预制桩在第n段施工过程中的平均贯入度,其计算公式为:
10、;
11、其中,表示所述的第m根预制桩在第n段施工过程内的桩身贯入度;设定每段施工过程中的桩身贯入度标准误差区间(h'n-h偏,h'n+h偏),其中,h偏表示预设的桩身贯入度偏差阈值。
12、作为本发明进一步的方案:所述的数据处理模块中包括桩身垂直度误差设定单元,在所述的桩身垂直度误差设定单元中,执行以下步骤:
13、以海平面作为参考面,以桩身在海床上的落点为参考点,以参考点在海平面上的投影点作为原点o,以水平面为基准确定x轴,经过原点且垂直于水平面的直线为y轴,通过x轴、y轴确定z轴,建立空间直角坐标系;
14、获取施工过程中桩身任意一点坐标p(x,y,z),p点在xz平面上的投影记为p1(x,0,z);
15、以点o、p、p1构成三角形,计算三角形中∠pop1的正切值,其计算公式为:
16、;
17、以三角形的正切值作为施工过程中桩身垂直度的衡量标准,设定每段施工过程中的桩身垂直度标准误差区间(tan∠pop1-r偏,tan∠pop1+r偏),其中,r偏表示预设的桩身垂直度偏差阈值。
18、作为本发明进一步的方案:所述的数据处理模块中包括平面位置变化误差设定单元,在所述的平面位置变化误差设定单元中,执行以下步骤:
19、在空间直角坐标系中,每段施工过程内p点移动之后所到达的点记作q,q点坐标为q(x0,y0,z0),q点在xz平面上的投影记为q1(x0,0,z0),通过公式计算y0,其计算公式为:
20、;
21、通过公式计算x0和z0,其计算公式为:
22、;
23、计算p1和q1两点间x轴坐标的差值,计算公式为:
24、;
25、以l'n作为平面位置变化的衡量标准,设定每段施工过程中的平面位置变化标准误差区间(l'n-l偏,l'n+l偏),其中l偏表示预设的平面位置变化偏差阈值。
26、作为本发明进一步的方案:所述的风险判断模块中,执行以下步骤:
27、提取每段施工过程中的实时桩身贯入度数据,如果所述的实时桩身贯入度数据位于所述的桩身贯入度标准误差区间内,则判定所述的实时桩身贯入度数据为安全数据;如果所述的实时桩身贯入度数据位于所述的桩身贯入度标准误差区间外,则判定所述的实时桩身贯入度数据为贯入度异常数据,当出现贯入度异常数据时,发送贯入度风险预警到后台操作人员,提醒后台操作人员调整打桩机力度;
28、提取每段施工过程中的实时桩身垂直度数据,如果所述的实时桩身垂直度数据位于所述的桩身垂直度标准误差区间内,则判定所述的实时桩身垂直度数据为安全数据;如果所述的实时桩身垂直度数据位于所述的桩身垂直度标准误差区间外,则判定所述的实时桩身垂直度数据为垂直度异常数据,当出现当垂直度异常数据时,发送垂直度风险预警到后台操作人员,提醒后台操作人员调整打桩机角度;
29、提取每段施工过程中的实时平面位置变化数据,如果所述的实时平面位置变化数据位于所述的平面位置变化标准误差区间内,则判定所述的实时平面位置变化数据为安全数据;如果所述的实时平面位置变化数据位于所述的平面位置变化标准误差区间外,则判定所述的实时平面位置变化数据为平面位置变化异常数据,当出现平面位置变化异常数据时,发送平面位置变化风险预警到后台操作人员,提醒后台操作人员调整打桩机力度或打桩机角度。
30、作为本发明进一步的方案:在风险判断模块中,提取实时桩身垂直度数据的过程中,计算正切值时,在桩身上选取的点,应和计算历史桩身垂直度数据时选取的点的位置相同。
31、作为本发明进一步的方案:所述的桩身贯入度误差设定单元中,某一段施工过程开始的时间点,距离施工过程完成的时间不足单位时间t,舍弃该段施工过程的桩身贯入度数据。
32、作为本发明进一步的方案:所述的数据采集模块中,以水平面的垂线为参考线,以桩身上任意一点在参考线上的投影点为参考点,以参考点在参考线上移动的距离作为桩身贯入度。
33、本发明的有益效果:沉桩包括静力压桩、锤击沉桩和振动沉桩三种方式,本实施例选用锤击沉桩;数据采集模块可以采集历史施工数据和实施施工数据,而采集历史施工数据是预测施工风险的必要因素;数据处理模块对采集的数据进行处理,使数据变得更加直观;风险判断模块可以根据不同的异常数据发送不同的预警信息,提高后台操作人员解决异常数据的效率,相比于常规的沉桩施工智能管控系统中,大多是在已经发生了施工风险的情况下向后台操作人员发出预警,本发明根据历史施工数据和实时施工数据能够实时预测施工过程中可能出现的问题,并发出相应的预警提示,降低施工风险,减少人力物力消耗,提高资源利用率。
- 还没有人留言评论。精彩留言会获得点赞!