直线运动装置位置测量方法、装置、电子设备及存储介质与流程
本发明涉及位置测量,具体而言,涉及一种直线运动装置位置测量方法、装置、电子设备及存储介质。
背景技术:
1、现有技术中,对于机床直线轴、直线电机、线性导轨等直线运动装置进行高精度的位置测量时,往往需要使用激光干涉仪才能满足精度要求(测量精度一般达到纳米级),然而激光干涉仪价格昂贵,在有多台直线运动装置都需要进行位置测量的情况下,考虑到成本,一般也只会购置少量激光干涉仪然后以分批测量的方式对多台直线运动装置进行位置测量,较低下的测量效率无疑会导致测量过程耗费大量时间,同时,由于激光干涉仪的安装过程和使用方法较为复杂,进一步降低测量效率,极大地延长测量周期,当直线运动装置需要经常进行位置测量时,反复拆装并转移激光干涉仪也容易导致激光干涉仪损坏。
2、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本发明的目的在于提供一种直线运动装置位置测量方法、装置、电子设备及存储介质,仅使用一次激光干涉仪便可以满足直线运动装置的高频测量要求。
2、第一方面,本发明提供了一种直线运动装置位置测量方法,用于直线运动装置,所述直线运动装置包括编码器和运动平台,所述编码器用于测量所述运动平台的当前位置,包括以下步骤:
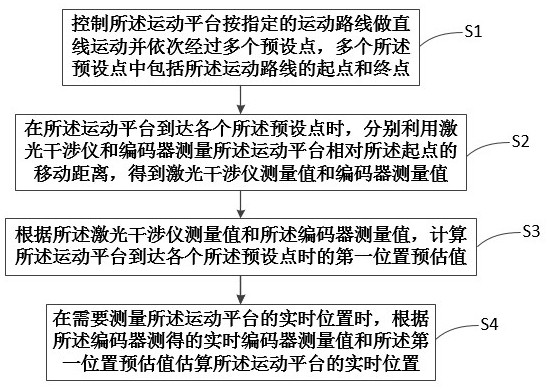
3、s1.控制所述运动平台按指定的运动路线做直线运动并依次经过多个预设点,多个所述预设点中包括所述运动路线的起点和终点;
4、s2.在所述运动平台到达各个所述预设点时,分别利用激光干涉仪和编码器测量所述运动平台相对所述起点的移动距离,得到激光干涉仪测量值和编码器测量值;
5、s3.根据所述激光干涉仪测量值和所述编码器测量值,计算所述运动平台到达各个所述预设点时的第一位置预估值;
6、s4.在需要测量所述运动平台的实时位置时,根据所述编码器测得的实时编码器测量值和所述第一位置预估值估算所述运动平台的实时位置。
7、本发明的直线运动装置位置测量方法,无需反复使用激光干涉仪,每一台直线运动装置只需要使用一次激光干涉仪获得多个测量值,依靠多个测量值便可以长期有效地测量出运动平台的位置。
8、进一步的,步骤s3中的具体步骤包括:
9、s31.根据所述激光干涉仪测量值和所述编码器测量值计算权重系数;
10、s32.根据所述权重系数计算所述第一位置预估值。
11、可见第一位置预估值是基于激光干涉仪测量值计算得到的,因此第一位置预估值本身具有较高的精度,能够实现后续测量精度的提升。
12、进一步的,步骤s31中的具体步骤包括:
13、s311.根据以下公式计算所述权重系数:
14、;
15、;
16、;
17、;
18、;
19、其中,为第i个所述预设点对应的权重系数,为第i个所述预设点对应的激光干涉仪测量值的标准差,为第i个所述预设点对应的编码器测量值的标准差,为第i个所述预设点对应的激光干涉仪测量值,为所有所述预设点的激光干涉仪测量值的均值,为第i个所述预设点对应的编码器测量值,为所有所述预设点的编码器测量值的均值,i表示第i个所述预设点,n为所述预设点的总数量。
20、获取各个预设点的第二标准差预估值达到最小值时的权重系数并根据权重系数计算出第一位置预估值,可以最大程度上提高测量精度。
21、进一步的,步骤s32中的具体步骤包括:
22、s321.根据以下公式计算所述第一位置预估值:
23、;
24、其中,为第i个所述预设点对应的第一位置预估值。
25、使用代替编码器测量值能够有效提升测量精度。
26、进一步的,步骤s4中的具体步骤包括:
27、s41.根据以下公式计算所述运动平台的实时位置:
28、;
29、;
30、其中,为所述运动平台的实时位置,为所述实时编码器测量值,j为所述运动平台当前位置的前一个所述预设点的序号,j+1为所述运动平台当前位置的后一个所述预设点的序号,所述运动平台当前位置处于第j个所述预设点和第j+1个所述预设点之间,为第j个所述预设点的编码器测量值,第j+1个所述预设点的编码器测量值,为第j个所述预设点的第一位置预估值,为第j+1个所述预设点的第一位置预估值。
31、第二方面,本发明提供了一种直线运动装置位置测量装置,用于直线运动装置,所述直线运动装置包括编码器和运动平台,所述编码器用于测量所述运动平台的当前位置,包括:
32、控制模块,用于控制所述运动平台按指定的运动路线做直线运动并依次经过多个预设点,多个所述预设点中包括所述运动路线的起点和终点;
33、测量模块,用于在所述运动平台到达各个所述预设点时,分别利用激光干涉仪和编码器测量所述运动平台相对所述起点的移动距离,得到激光干涉仪测量值和编码器测量值;
34、第一计算模块,用于根据所述激光干涉仪测量值和所述编码器测量值,计算所述运动平台到达各个所述预设点时的第一位置预估值;
35、第二计算模块,用于在需要测量所述运动平台的实时位置时,根据所述编码器测得的实时编码器测量值和所述第一位置预估值估算所述运动平台的实时位置。
36、本发明提供的直线运动装置位置测量装置仅使用一次激光干涉仪,便能够提高后续的测量精度,即使不再使用激光干涉仪,也能够更准确的测量出运动平台的位置。
37、进一步的,第一计算模块在用于根据所述激光干涉仪测量值和所述编码器测量值,计算所述运动平台到达各个所述预设点时的第一位置预估值的时候执行:
38、s31.根据所述激光干涉仪测量值和所述编码器测量值计算权重系数;
39、s32.根据所述权重系数计算所述第一位置预估值。
40、进一步的,第一计算模块在用于根据所述激光干涉仪测量值和所述编码器测量值计算权重系数的时候执行:
41、s311.根据以下公式计算所述权重系数:
42、;
43、;
44、;
45、;
46、;
47、其中,为第i个所述预设点对应的权重系数,为第i个所述预设点对应的激光干涉仪测量值的标准差,为第i个所述预设点对应的编码器测量值的标准差,为第i个所述预设点对应的激光干涉仪测量值,为所有所述预设点的激光干涉仪测量值的均值,为第i个所述预设点对应的编码器测量值,为所有所述预设点的编码器测量值的均值,i表示第i个所述预设点,n为所述预设点的总数量。
48、第三方面,本发明提供一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上述第一方面提供的所述直线运动装置位置测量方法中的步骤。
49、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如上述第一方面提供的所述直线运动装置位置测量方法中的步骤。
50、由上可知,本发明提供的直线运动装置位置测量方法,仅利用一次激光干涉仪获取多个点位的测量值后,便可以不再使用激光干涉仪,而仅依靠测量值估算出运动平台的位置,相比于仅使用编码器获取运动平台的位置,本方法测量精度更高,依然能够满足高精度要求。
51、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!