缺陷位置确定方法和装置与流程
本技术属于透明产品缺陷检测,尤其涉及一种缺陷位置确定方法和装置。
背景技术:
1、在工业上对透明产品进行质量检测过程中,需要对透明产品上的缺陷进行检测。相关技术中存在对采集的产品图像进行特征提取来检测缺陷的方法,该方法无法区分出透明产品上表面和下表面的缺陷,且检测的精度和准确性不高。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种缺陷位置确定方法和装置,在图像的对比度以及一致性不高的情况下也能得到精确的矫正结果,使得最终确定的缺陷特征的实际位置较精确;且对存在较大畸变的图像也能进行矫正,适用范围较广;能够区分出目标透明对象上下表层的缺陷,确定出的缺陷位置的精确度和准确度较高。
2、第一方面,本技术提供了一种缺陷位置确定方法,该方法包括:
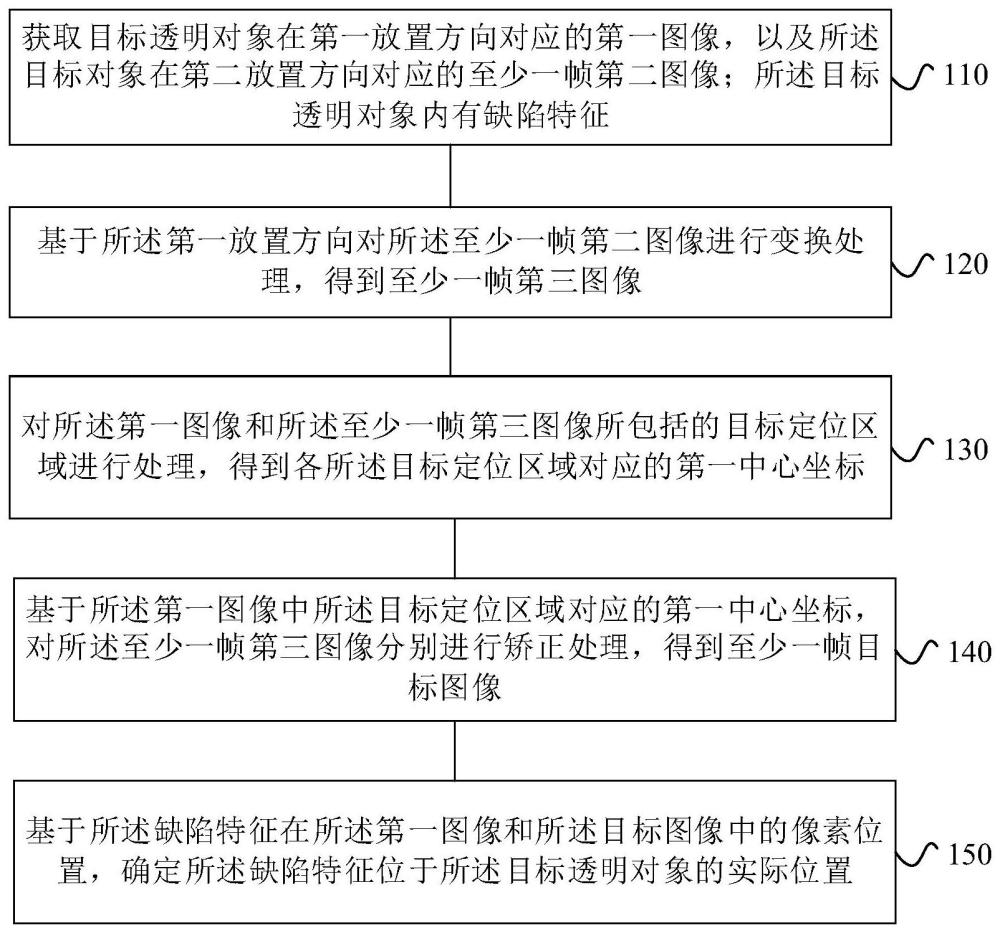
3、获取目标透明对象在第一放置方向对应的第一图像,以及所述目标对象在第二放置方向对应的至少一帧第二图像;所述目标透明对象内有缺陷特征;
4、基于所述第一放置方向对所述至少一帧第二图像进行变换处理,得到至少一帧第三图像;
5、对所述第一图像和所述至少一帧第三图像所包括的目标定位区域进行处理,得到各所述目标定位区域对应的第一中心坐标;
6、基于所述第一图像中所述目标定位区域对应的第一中心坐标,对所述至少一帧第三图像分别进行矫正处理,得到至少一帧目标图像;
7、基于所述缺陷特征在所述第一图像和所述目标图像中的像素位置,确定所述缺陷特征位于所述目标透明对象的实际位置。
8、根据本技术实施例提供的缺陷位置确定方法,通过获取目标透明对象在不同放置方向的第一图像和第二图像,然后通过变换处理将第二图像变换至与第一方向的放置方向相同的第三图像,再将第一图像作为基准图像,对第三图像进行矫正处理,得到无畸变的目标图像,在图像的对比度以及一致性不高的情况下也能得到精确的矫正结果,使得最终确定的缺陷特征的实际位置较精确;且对存在较大畸变的图像也能进行矫正,适用范围较广;通过缺陷特征在第一图像和目标图像上的像素位置之间的差异度,确定缺陷特征在目标透明对象上的实际位置,能够区分出目标透明对象上下表层的缺陷,确定出的缺陷位置的精确度和准确度较高。
9、本技术一个实施例的缺陷位置确定方法,所述基于所述缺陷特征在所述第一图像和所述目标图像中的像素位置,确定所述缺陷特征位于所述目标透明对象的实际位置,包括:
10、基于所述缺陷特征在所述第一图像中的第一像素位置,以及所述缺陷特征在所述目标图像中的第二像素位置,确定所述第一像素位置和所述第二像素位置之间的目标偏移量;
11、基于所述目标偏移量和目标偏移阈值,确定所述缺陷特征位于所述目标透明对象的所述实际位置。
12、本技术一个实施例的缺陷位置确定方法,所述基于所述目标偏移量和目标偏移阈值,确定所述缺陷特征位于所述目标透明对象的所述实际位置,包括:
13、在所述目标偏移量小于所述目标偏移阈值的情况下,确定所述缺陷特征位于所述目标透明对象的下表面;
14、在所述目标偏移量不小于所述目标偏移阈值的情况下,确定所述缺陷特征位于所述目标透明对象的上表面。
15、本技术一个实施例的缺陷位置确定方法,所述基于所述第一图像中所述目标定位区域对应的第一中心坐标,对所述至少一帧第三图像分别进行矫正处理,得到至少一帧目标图像,包括:
16、基于所述第一图像中所述目标定位区域对应的第一中心坐标,分别对所述至少一帧第三图像中所述目标定位区域对应的第一中心坐标进行投影变换,得到所述至少一帧第三图像在第二二维平面所对应的第二中心坐标;所述第一中心坐标位于第一二维平面;
17、基于所述第二中心坐标,分别对所述至少一帧第三图像进行矫正处理,得到所述至少一帧目标图像。
18、本技术一个实施例的缺陷位置确定方法,所述基于所述第一图像中所述目标定位区域对应的第一中心坐标,分别对所述至少一帧第三图像中所述目标定位区域对应的第一中心坐标进行投影变换,得到所述至少一帧第三图像在第二二维平面所对应的第二中心坐标,包括:
19、将所述至少一帧第三图像中所述目标定位区域对应的第一中心坐标投射至三维空间,得到所述至少一帧第三图像中所述目标定位区域对应的第三中心坐标;
20、将所述第三中心坐标投射至所述第二二维平面,得到所述第二中心坐标。
21、本技术一个实施例的缺陷位置确定方法,所述对所述第一图像和所述至少一帧第三图像所包括的目标定位区域进行处理,得到各所述目标定位区域对应的第一中心坐标,包括:
22、对各所述目标定位区域进行轮廓提取,得到各所述目标定位区域对应的第一轮廓;
23、对各所述第一轮廓进行形状拟合,得到各所述第一轮廓对应的第二轮廓;
24、基于各所述第二轮廓,获取各所述第二轮廓对应的第一中心坐标。
25、本技术一个实施例的缺陷位置确定方法,所述目标定位区域包括多个子目标定位区域,
26、所述对所述第一图像和所述至少一帧第三图像所包括的目标定位区域进行处理,得到各所述目标定位区域对应的第一中心坐标,包括:对各所述子目标定位区域进行处理,得到各所述子目标定位区域对应的第一中心坐标;
27、所述基于所述第一图像中所述目标定位区域对应的第一中心坐标,对所述至少一帧第三图像分别进行矫正处理,得到至少一帧目标图像,包括:基于所述第一图像中所述多个子目标定位区域的所述第一中心坐标,对所述至少一帧第三图像进行矫正处理,得到所述至少一帧目标图像。
28、第二方面,本技术提供了一种缺陷位置确定装置,该装置包括:
29、第一处理模块,用于获取目标透明对象在第一放置方向对应的第一图像,以及所述目标对象在第二放置方向对应的至少一帧第二图像;所述目标透明对象内有缺陷特征;
30、第二处理模块,用于基于所述第一放置方向对所述至少一帧第二图像进行变换处理,得到至少一帧第三图像;
31、第三处理模块,用于对所述第一图像和所述至少一帧第三图像所包括的目标定位区域进行处理,得到各所述目标定位区域对应的第一中心坐标;
32、第四处理模块,用于基于所述第一图像中所述目标定位区域对应的第一中心坐标,对所述至少一帧第三图像分别进行矫正处理,得到至少一帧目标图像;
33、第五处理模块,用于基于所述缺陷特征在所述第一图像和所述目标图像中的像素位置,确定所述缺陷特征位于所述目标透明对象的实际位置。
34、根据本技术实施例提供的缺陷位置确定装置,通过获取目标透明对象在不同放置方向的第一图像和第二图像,然后通过变换处理将第二图像变换至与第一方向的放置方向相同的第三图像,再将第一图像作为基准图像,对第三图像进行矫正处理,得到无畸变的目标图像,在图像的对比度以及一致性不高的情况下也能得到精确的矫正结果,使得最终确定的缺陷特征的实际位置较精确;且对存在较大畸变的图像也能进行矫正,适用范围较广;通过缺陷特征在第一图像和目标图像上的像素位置之间的差异度,确定缺陷特征在目标透明对象上的实际位置,能够区分出目标透明对象上下表层的缺陷,确定出的缺陷位置的精确度和准确度较高。
35、第三方面,本技术提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的缺陷位置确定方法。
36、第四方面,本技术提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的缺陷位置确定方法。
37、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的缺陷位置确定方法。
38、本技术实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
39、通过获取目标透明对象在不同放置方向的第一图像和第二图像,然后通过变换处理将第二图像变换至与第一方向的放置方向相同的第三图像,再将第一图像作为基准图像,对第三图像进行矫正处理,得到无畸变的目标图像,在图像的对比度以及一致性不高的情况下也能得到精确的矫正结果,使得最终确定的缺陷特征的实际位置较精确;且对存在较大畸变的图像也能进行矫正,适用范围较广;通过缺陷特征在第一图像和目标图像上的像素位置之间的差异度,确定缺陷特征在目标透明对象上的实际位置,能够区分出目标透明对象上下表层的缺陷,确定出的缺陷位置的精确度和准确度较高。
40、进一步地,通过获取缺陷特征在第一图像和目标图像中的像素位置之间的目标偏移量,并基于目标偏移阈值判断目标偏移量的大小,能够基于目标偏移量的大小确定缺陷特征位于目标透明对象的上表面还是下表面,可以准确区分出目标透明对象上下表层的缺陷,操作便捷易行,适用范围较广泛。
41、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!