挖掘机倾斜斗铲尖位置自动监测方法、装置、系统、设备及介质与流程
本发明属于数字化施工,具体涉及一种挖掘机倾斜斗铲尖位置自动监测方法、装置、系统、设备及介质。
背景技术:
1、挖掘机是功能最典型、用途最广泛和结构最复杂的工程机械之一,它在工业与民用建筑、交通运输、矿山采掘、水利电力工程以及军事工程等施工中起着极为重要的作用。但是挖掘机由于其操作的复杂性,平整作业要保证作业精度,需要操作员具有足够的经验和判断力,并同时操纵几个手柄,这对操作员的操作水平要求较高。尤其是对工程质量精度要求较高的场合,往往需要操作员和工程技术人员协调配合,一边施工一边测量才能完成工作。当操作员操作水平不高、经验不足或是发挥失常时,会出现一次开挖不到位或者是超挖的现象,需要对作业面进行反复测量,现场质量控制难度大,工效低。
2、目前,倾斜斗与普通挖机的结构有差异,其在具备泥斗的所有优点下,还可以通过油缸作用控制转动挖斗,最大倾斜角度为45度,即不需改变挖掘机位置就能进行作业,轻松完成普通铲斗无法完成的精准作业。特别适用于刷坡和整平等修整工作以及对河道或水沟的清淤工作。但是现有挖机倾斜斗工装位置检测系统还无法精准定位铲斗的三维位置信息以引导操作员进行施工作业,同样存在现场质量控制难度大和工效低的问题。因此如何提供一种能够在作业过程中自动监测挖掘机倾斜斗铲尖位置并实时展示给操作员的挖机操作辅助方案,以便引导操作员进行施工作业,降低现场质量控制难度,并提高工效,是本领域技术人员亟需研究的课题。
技术实现思路
1、本发明的目的是提供一种挖掘机倾斜斗铲尖位置自动监测方法、装置、系统、计算机设备及计算机可读存储介质,用以解决现有挖机倾斜斗工装位置检测系统还无法精准定位铲斗的三维位置信息以引导操作员进行施工作业,使得同样存在现场质量控制难度大和工效低的问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、第一方面,提供了一种挖掘机倾斜斗铲尖位置自动监测方法,包括:
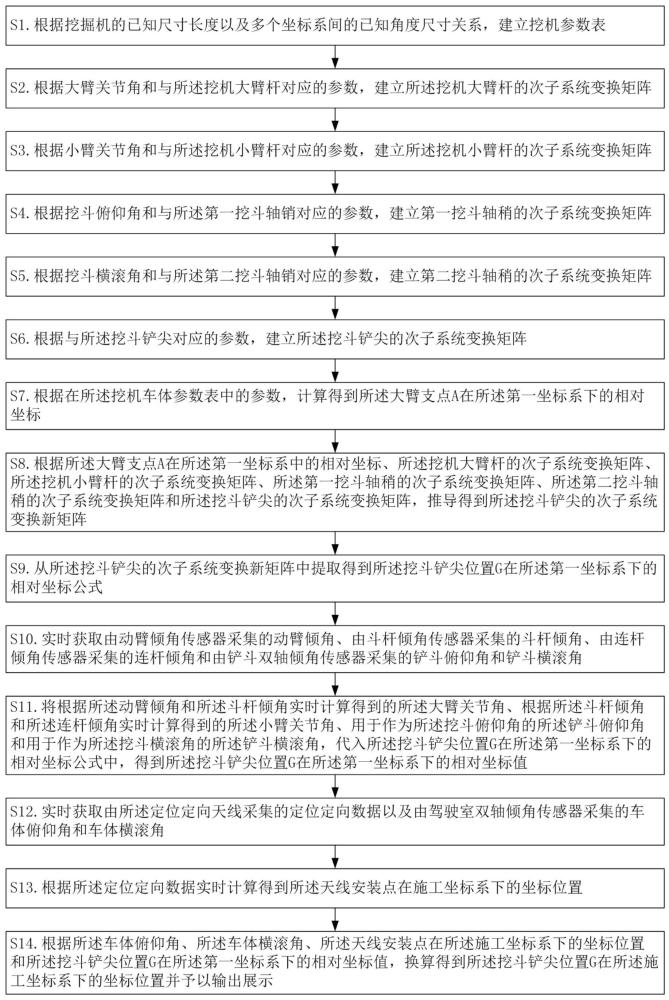
4、根据挖掘机的已知尺寸长度以及多个坐标系间的已知角度尺寸关系,建立挖机参数表,其中,所述挖机参数表包含有挖机车体参数表和挖机连杆参数表,所述挖机车体参数表包含有如下六个参数:q0=on、q1=nt、q2=ta、q3=90°、q4=0°和q5=0°,所述挖机连杆参数表包括有与挖机大臂杆对应的如下四个参数:q6=-90°、q7=0、q8=0和q9=-90°,所述挖机连杆参数表还包括有与挖机小臂杆对应的如下五个参数:q10=0°、q11=al、q12=0、q13=90°和q14=0°,所述挖机连杆参数表还包括有与第一挖斗轴销对应的如下五个参数:q15=0°、q16=ld、q17=0、q18=0°和q19=0°,所述挖机连杆参数表还包括有与第二挖斗轴销对应的如下四个参数:q20=90°、q21=dx、q22=0和q23=0°,所述挖机连杆参数表还包括有与挖斗铲尖对应的如下四个参数:q24=0°、q25=xg、q26=0和q27=0°,on表示天线安装点至大臂支点a的水平距离,nt表示所述天线安装点至所述大臂支点a的垂直距离,ta表示所述天线安装点至所述大臂支点a的高程差值,所述天线安装点是指定位定向天线在挖机驾驶室顶部的固定安装位置,al表示所述大臂支点a到所述挖机大臂杆与所述挖机小臂杆的交点l的距离,ld表示所述交点l至所述第一挖斗轴销的轴销所在点d的距离,dx表示所述轴销所在点d至所述第二挖斗轴销的轴销所在点x的距离,xg表示所述轴销所在点x至挖斗铲尖位置g的距离,所述多个坐标系包括有以所述天线安装点为原点的第一坐标系、以所述大臂支点a为原点的第二坐标系、以所述交点l为原点的第三坐标系、以所述轴销所在点d为原点的第四坐标系和以所述轴销所在点x为原点的第五坐标系;
5、根据大臂关节角a2和与所述挖机大臂杆对应的参数:q6=-90°、q7=0、q8=0和q9=-90°,建立所述挖机大臂杆的次子系统变换矩阵:
6、根据小臂关节角a3和与所述挖机小臂杆对应的参数:q10=0°、q11=al、q12=0、q13=90°和q14=0°,建立所述挖机小臂杆的次子系统变换矩阵:
7、根据挖斗俯仰角a4和与所述第一挖斗轴销对应的参数:q15=0°、q16=ld、q17=0、q18=0°和q19=0°,建立第一挖斗轴稍的次子系统变换矩阵:
8、根据挖斗横滚角a5和与所述第二挖斗轴销对应的参数:q20=90°、q21=dx、q22=0和q23=0°,建立第二挖斗轴稍的次子系统变换矩阵:
9、根据与所述挖斗铲尖对应的参数:q24=0°、q25=xg、q26=0和q27=0°,建立所述挖斗铲尖的次子系统变换矩阵:
10、根据在所述挖机车体参数表中的参数:q0=on、q1=nt、q2=ta、q3=90°、q4=0°和q5=0°,计算得到所述大臂支点a在所述第一坐标系下的相对坐标:
11、
12、根据所述大臂支点a在所述第一坐标系中的相对坐标、所述挖机大臂杆的次子系统变换矩阵、所述挖机小臂杆的次子系统变换矩阵、所述第一挖斗轴稍的次子系统变换矩阵、所述第二挖斗轴稍的次子系统变换矩阵和所述挖斗铲尖的次子系统变换矩阵,按照如下公式推导得到所述挖斗铲尖的次子系统变换新矩阵:
13、
14、式中,φ1=ω1cosa4+ω2sina4,φ2=-ω1sina4+ω2cosa4,φ3=ω1*ld+al*sina2+nt,φ4=ω3cosa4+ω4sina4,φ5=-ω3sina4+ω4cosa4,φ6=ω3*ld+al*cosa2+ta , ω1=-sina2 sina3+cosa2 cosa3 ,ω2=-sina2 cosa3-cosa2 sina3 , ω3=-cosa2 sina3-sina2cosa3 ,ω4=-cosa2 cosa3+sina2 sina3;
15、从所述挖斗铲尖的次子系统变换新矩阵中提取得到所述挖斗铲尖位置g在所述第一坐标系下的如下相对坐标公式:
16、
17、实时获取由动臂倾角传感器采集的动臂倾角、由斗杆倾角传感器采集的斗杆倾角、由连杆倾角传感器采集的连杆倾角和由铲斗双轴倾角传感器采集的铲斗俯仰角和铲斗横滚角,其中,所述动臂倾角传感器固定安装在挖机动臂上,所述斗杆倾角传感器固定安装在挖机斗杆上,所述连杆倾角传感器固定安装在挖机连杆上,所述铲斗双轴倾角传感器固定安装在挖机铲斗上;
18、将根据所述动臂倾角和所述斗杆倾角实时计算得到的所述大臂关节角a2、根据所述斗杆倾角和所述连杆倾角实时计算得到的所述小臂关节角a3、用于作为所述挖斗俯仰角a4的所述铲斗俯仰角和用于作为所述挖斗横滚角a5的所述铲斗横滚角,代入所述挖斗铲尖位置g在所述第一坐标系下的相对坐标公式中,得到所述挖斗铲尖位置g在所述第一坐标系下的相对坐标值;
19、实时获取由所述定位定向天线采集的定位定向数据以及由驾驶室双轴倾角传感器采集的车体俯仰角和车体横滚角,其中,所述驾驶室双轴倾角传感器固定安装在挖机驾驶室的所在车体上;
20、根据所述定位定向数据实时计算得到所述天线安装点在施工坐标系下的坐标位置;
21、根据所述车体俯仰角、所述车体横滚角、所述天线安装点在所述施工坐标系下的坐标位置和所述挖斗铲尖位置g在所述第一坐标系下的相对坐标值,换算得到所述挖斗铲尖位置g在所述施工坐标系下的坐标位置并予以输出展示。
22、基于上述
技术实现要素:
,提供了一种基于定位定向天线和倾角传感器实现在作业过程中自动监测挖掘机倾斜斗铲尖位置并实时展示给操作员的挖机操作辅助方案,即先根据挖掘机的已知尺寸长度以及多个坐标系间的已知角度尺寸关系,建立挖机参数表,然后基于挖机参数表建立并推导得到挖斗铲尖的次子系统变换新矩阵,并从该新矩阵中提取得到挖斗铲尖位置的相对坐标公式,最后基于该相对坐标公式和定位定向天线以及多个倾角传感器的实时采集数据,换算得到挖斗铲尖位置在施工坐标系下的坐标位置并予以输出展示,如此可引导操作员进行施工作业,降低现场质量控制难度,并提高工效,进而实现记录施工详细位置信息和实现根据设计面引导精细施工功能,便于实际应用和推广。
23、第二方面,提供了一种挖掘机倾斜斗铲尖位置自动监测装置,包括有参数表建立模块、变换矩阵建立模块、相对坐标计算模块、变换新矩阵推导模块、坐标公式提取模块、监测数据获取模块、相对坐标计算模块、施工坐标计算模块和施工坐标换算模块;
24、所述参数表建立模块,用于根据挖掘机的已知尺寸长度以及多个坐标系间的已知角度尺寸关系,建立挖机参数表,其中,所述挖机参数表包含有挖机车体参数表和挖机连杆参数表,所述挖机车体参数表包含有如下六个参数:q0=on、q1=nt、q2=ta、q3=90°、q4=0°和q5=0°,所述挖机连杆参数表包括有与挖机大臂杆对应的如下四个参数:q6=-90°、q7=0、q8=0和q9=-90°,所述挖机连杆参数表还包括有与挖机小臂杆对应的如下五个参数:q10=0°、q11=al、q12=0、q13=90°和q14=0°,所述挖机连杆参数表还包括有与第一挖斗轴销对应的如下五个参数:q15=0°、q16=ld、q17=0、q18=0°和q19=0°,所述挖机连杆参数表还包括有与第二挖斗轴销对应的如下四个参数:q20=90°、q21=dx、q22=0和q23=0°,所述挖机连杆参数表还包括有与挖斗铲尖对应的如下四个参数:q24=0°、q25=xg、q26=0和q27=0°,on表示天线安装点至大臂支点a的水平距离,nt表示所述天线安装点至所述大臂支点a的垂直距离,ta表示所述天线安装点至所述大臂支点a的高程差值,所述天线安装点是指定位定向天线在挖机驾驶室顶部的固定安装位置,al表示所述大臂支点a到所述挖机大臂杆与所述挖机小臂杆的交点l的距离,ld表示所述交点l至所述第一挖斗轴销的轴销所在点d的距离,dx表示所述轴销所在点d至所述第二挖斗轴销的轴销所在点x的距离,xg表示所述轴销所在点x至挖斗铲尖位置g的距离,所述多个坐标系包括有以所述天线安装点为原点的第一坐标系、以所述大臂支点a为原点的第二坐标系、以所述交点l为原点的第三坐标系、以所述轴销所在点d为原点的第四坐标系和以所述轴销所在点x为原点的第五坐标系;
25、所述变换矩阵建立模块,通信连接所述参数表建立模块,用于根据大臂关节角a2和与所述挖机大臂杆对应的参数:q6=-90°、q7=0、q8=0和q9=-90°,建立所述挖机大臂杆的次子系统变换矩阵:
26、所述变换矩阵建立模块,还用于根据小臂关节角a3和与所述挖机小臂杆对应的参数:q10=0°、q11=al、q12=0、q13=90°和q14=0°,建立所述挖机小臂杆的次子系统变换矩阵:
27、所述变换矩阵建立模块,还用于根据挖斗俯仰角a4和与所述第一挖斗轴销对应的参数:q15=0°、q16=ld、q17=0、q18=0°和q19=0°,建立第一挖斗轴稍的次子系统变换矩阵:
28、所述变换矩阵建立模块,还用于根据挖斗横滚角a5和与所述第二挖斗轴销对应的参数:q20=90°、q21=dx、q22=0和q23=0°,建立第二挖斗轴稍的次子系统变换矩阵:
29、所述变换矩阵建立模块,还用于根据与所述挖斗铲尖对应的参数:q24=0°、q25=xg、q26=0和q27=0°,建立所述挖斗铲尖的次子系统变换矩阵:
30、所述相对坐标计算模块,通信连接所述参数表建立模块,用于根据在所述挖机车体参数表中的参数:q0=on、q1=nt、q2=ta、q3=90°、q4=0°和q5=0°,计算得到所述大臂支点a在所述第一坐标系下的相对坐标:
31、所述变换新矩阵推导模块,分别通信连接所述变换矩阵建立模块和所述相对坐标计算模块,用于根据所述大臂支点a在所述第一坐标系中的相对坐标、所述挖机大臂杆的次子系统变换矩阵、所述挖机小臂杆的次子系统变换矩阵、所述第一挖斗轴稍的次子系统变换矩阵、所述第二挖斗轴稍的次子系统变换矩阵和所述挖斗铲尖的次子系统变换矩阵,按照如下公式推导得到所述挖斗铲尖的次子系统变换新矩阵:
32、
33、式中,φ1=ω1cosa4+ω2sina4,φ2=-ω1sina4+ω2cosa4,φ3=ω1*ld+al*sina2+nt,φ4=ω3cosa4+ω4sina4,φ5=-ω3sina4+ω4cosa4,φ6=ω3*ld+al*cosa2+ta,ω1=-sina2 sina3+cosa2 cosa3,ω2=-sina2 cosa3-cosa2 sina3,ω3=-cosa2 sina3-sina2cosa3,ω4=-cosa2 cosa3+sina2 sina3;
34、所述坐标公式提取模块,通信连接所述变换新矩阵推导模块,用于从所述挖斗铲尖的次子系统变换新矩阵中提取得到所述挖斗铲尖位置g在所述第一坐标系下的如下相对坐标公式:
35、
36、所述监测数据获取模块,用于实时获取由动臂倾角传感器采集的动臂倾角、由斗杆倾角传感器采集的斗杆倾角、由连杆倾角传感器采集的连杆倾角和由铲斗双轴倾角传感器采集的铲斗俯仰角和铲斗横滚角,其中,所述动臂倾角传感器固定安装在挖机动臂上,所述斗杆倾角传感器固定安装在挖机斗杆上,所述连杆倾角传感器固定安装在挖机连杆上,所述铲斗双轴倾角传感器固定安装在挖机铲斗上;
37、所述相对坐标计算模块,分别通信连接所述坐标公式提取模块和所述监测数据获取模,用于将根据所述动臂倾角和所述斗杆倾角实时计算得到的所述大臂关节角a2、根据所述斗杆倾角和所述连杆倾角实时计算得到的所述小臂关节角a3、用于作为所述挖斗俯仰角a4的所述铲斗俯仰角和用于作为所述挖斗横滚角a5的所述铲斗横滚角,代入所述挖斗铲尖位置g在所述第一坐标系下的相对坐标公式中,得到所述挖斗铲尖位置g在所述第一坐标系下的相对坐标值;
38、所述监测数据获取模块,还用于实时获取由所述定位定向天线采集的定位定向数据以及由驾驶室双轴倾角传感器采集的车体俯仰角和车体横滚角,其中,所述驾驶室双轴倾角传感器固定安装在挖机驾驶室的所在车体上;
39、所述施工坐标计算模块,通信连接所述监测数据获取模块,用于根据所述定位定向数据实时计算得到所述天线安装点在施工坐标系下的坐标位置;
40、所述施工坐标换算模块,分别通信连接所述监测数据获取模块、所述施工坐标计算模块和所述相对坐标计算模块,用于根据所述车体俯仰角、所述车体横滚角、所述天线安装点在所述施工坐标系下的坐标位置和所述挖斗铲尖位置g在所述第一坐标系下的相对坐标值,换算得到所述挖斗铲尖位置g在所述施工坐标系下的坐标位置并予以输出展示。
41、第三方面,本发明提供了一种挖掘机倾斜斗铲尖位置自动监测系统,包括有智能显控终端、定位定向天线、驾驶室双轴倾角传感器、动臂倾角传感器、斗杆倾角传感器、连杆倾角传感器和铲斗双轴倾角传感器,其中,所述智能显控终端分别通信连接所述定位定向天线、所述驾驶室双轴倾角传感器、所述动臂倾角传感器、所述斗杆倾角传感器、所述连杆倾角传感器和所述铲斗双轴倾角传感器;
42、所述定位定向天线,固定安装在挖机驾驶室的顶部,用于实时采集天线安装点的定位定向数据,并将采集结果实时传送至所述智能显控终端;
43、所述驾驶室双轴倾角传感器,固定安装在所述挖机驾驶室的所在车体上,用于实时采集车体俯仰角和车体横滚角,并将采集结果实时传送至所述智能显控终端;
44、所述动臂倾角传感器,固定安装在挖机动臂上,用于实时采集动臂倾角,并将采集结果实时传送至所述智能显控终端;
45、所述斗杆倾角传感器,固定安装在挖机斗杆上,用于实时采集斗杆倾角,并将采集结果实时传送至所述智能显控终端;
46、所述连杆倾角传感器,固定安装在挖机连杆上,用于实时采集连杆倾角,并将采集结果实时传送至所述智能显控终端;
47、所述铲斗双轴倾角传感器,固定安装在挖机铲斗上,用于实时采集铲斗俯仰角和铲斗横滚角,并将采集结果实时传送至所述智能显控终端;
48、所述智能显控终端,固定安装在所述挖机驾驶室内,用于执行如第一方面或第一方面中任意可能设计所述的挖掘机倾斜斗铲尖位置自动监测方法。
49、第四方面,本发明提供了一种计算机设备,包括有依次通信连接的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面或第一方面中任意可能设计所述的挖掘机倾斜斗铲尖位置自动监测方法。
50、第五方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面或第一方面中任意可能设计所述的挖掘机倾斜斗铲尖位置自动监测方法。
51、第六方面,本发明提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面或第一方面中任意可能设计所述的挖掘机倾斜斗铲尖位置自动监测方法。
52、上述方案的有益效果:
53、(1)本发明创造性提供了一种基于定位定向天线和倾角传感器实现在作业过程中自动监测挖掘机倾斜斗铲尖位置并实时展示给操作员的挖机操作辅助方案,即先根据挖掘机的已知尺寸长度以及多个坐标系间的已知角度尺寸关系,建立挖机参数表,然后基于挖机参数表建立并推导得到挖斗铲尖的次子系统变换新矩阵,并从该新矩阵中提取得到挖斗铲尖位置的相对坐标公式,最后基于该相对坐标公式和定位定向天线以及多个倾角传感器的实时采集数据,换算得到挖斗铲尖位置在施工坐标系下的坐标位置并予以输出展示,如此可引导操作员进行施工作业,降低现场质量控制难度,并提高工效,进而实现记录施工详细位置信息和实现根据设计面引导精细施工功能,便于实际应用和推广。
- 还没有人留言评论。精彩留言会获得点赞!