五轴机器人的逆解方法、装置、电子设备和存储介质与流程
本发明涉及机器人,具体而言,涉及一种五轴机器人的逆解方法、装置、电子设备和存储介质。
背景技术:
1、针对传统水平面内的码垛任务,基于成本等考虑,多采用四轴平行四边形结构机器人,平行四边形的码垛机器人具有高刚度高节拍等优点,但是缺点也比较明显,主要体现在这种结构的需要重新设计及开模,开发成本高,其次,难以应用非水平面内的码垛任务。基于上述两点诞生出了五轴机器人,这种结构的机器人源于同型号的六轴球形手腕机器人的衍生,即将六轴机器人中第四个关节轴的电机和减速器去掉,并采用连接件替代以构成五轴机器人,这种结构相比六轴机器人,成本有一定程度的降低,同时可以兼容水平面码垛和非水平面码垛这两种场景。针对五轴机器人,目前通常采用传统的六轴球形手腕机器人的逆解方法来确定各个关节轴的关节角度,但是对于非水平面码垛场景,这种逆解方法无法保证第四个关节轴的关节角度恒定为零,无法适用于五轴机器人。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种五轴机器人的逆解方法、装置、电子设备和存储介质。
2、为了实现上述目的,本发明采用的技术方案如下:
3、第一方面,本发明提供一种五轴机器人的逆解方法,所述五轴机器人包含依次连接的六个关节轴且第四个关节轴为虚拟轴,所述五轴机器人的第二个关节轴、第三个关节轴和第五个关节轴的旋转轴线平行,所述五轴机器人的逆解方法包括:
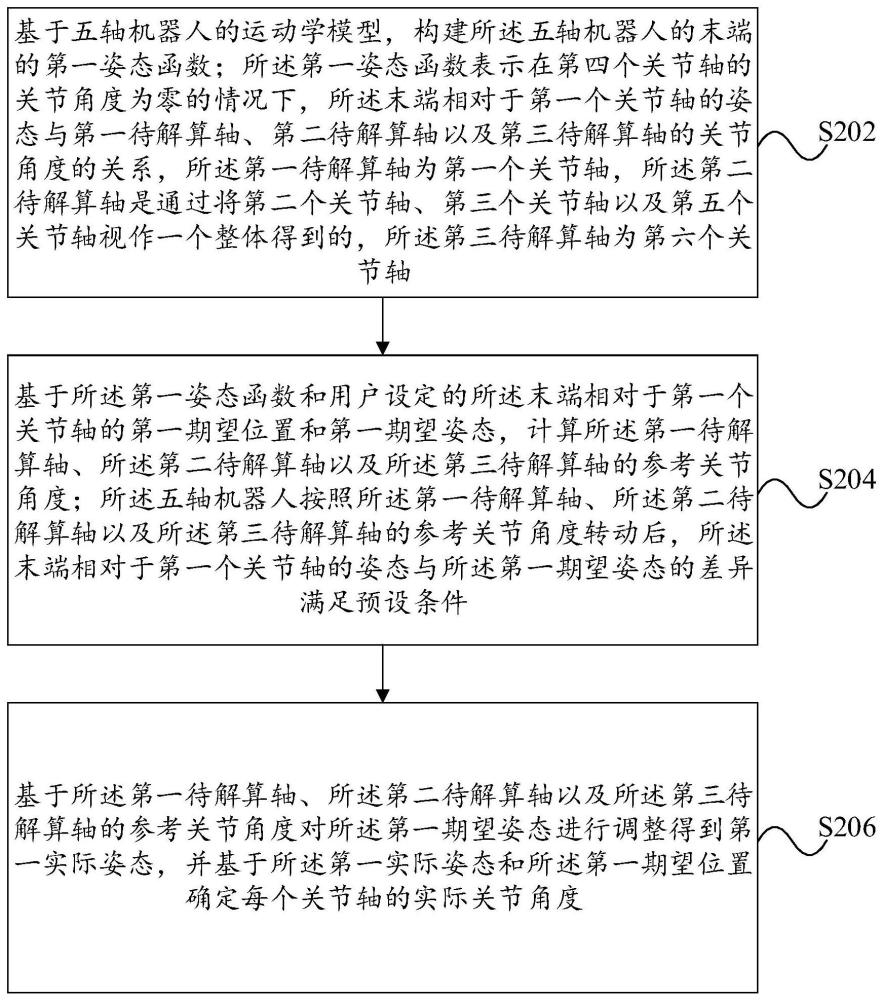
4、基于五轴机器人的运动学模型,构建所述五轴机器人的末端的第一姿态函数;所述第一姿态函数表示在第四个关节轴的关节角度为零的情况下,所述末端相对于第一个关节轴的姿态与第一待解算轴、第二待解算轴以及第三待解算轴的关节角度的关系,所述第一待解算轴为第一个关节轴,所述第二待解算轴是通过将第二个关节轴、第三个关节轴以及第五个关节轴视作一个整体得到的,所述第三待解算轴为第六个关节轴;
5、基于所述第一姿态函数和用户设定的所述末端相对于第一个关节轴的第一期望位置和第一期望姿态,计算所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度;所述五轴机器人按照所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度转动后,所述末端相对于第一个关节轴的姿态与所述第一期望姿态的差异满足预设条件;
6、基于所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度对所述第一期望姿态进行调整得到第一实际姿态,并基于所述第一实际姿态和所述第一期望位置确定每个关节轴的实际关节角度。
7、在可选的实施方式中,所述基于五轴机器人的运动学模型,构建所述五轴机器人的末端的第一姿态函数的步骤,包括:
8、基于标准dh法建立所述五轴机器人的运动学模型,得到每个关节轴的dh参数;
9、基于每个关节轴的dh参数,构建所述五轴机器人的末端的第一姿态函数。
10、在可选的实施方式中,所述基于所述第一姿态函数和用户设定的所述末端相对于第一个关节轴的第一期望位置和第一期望姿态,计算所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度的步骤,包括:
11、基于所述第一期望位置,计算所述第一待解算轴的参考关节角度;
12、基于所述第一待解算轴的参考关节角度,计算第二个关节轴相对于第一个关节轴的姿态;
13、基于所述第一期望姿态和所述第二个关节轴相对于第一个关节轴的姿态,计算所述末端相对于第二个关节轴的第二期望姿态;
14、基于所述第一姿态函数和所述第二个关节轴相对于第一个关节轴的姿态,得到所述末端的第二姿态函数;所述第二姿态函数表示所述末端相对于第二个关节轴的姿态与所述第二待解算轴和所述第三待解算轴的关节角度的关系;
15、基于所述第二姿态函数和所述第二期望姿态,计算所述第二待解算轴和所述第三待解算轴的参考关节角度。
16、在可选的实施方式中,所述基于所述第二姿态函数和所述第二期望姿态,计算所述第二待解算轴和所述第三待解算轴的参考关节角度的步骤,包括:
17、将所述第二待解算轴和所述第三待解算轴的初始关节角度分别作为其待定关节角度;
18、基于所述第二姿态函数以及所述第二待解算轴和所述第三待解算轴的待定关节角度,计算所述第二姿态函数的函数值;
19、计算所述第二姿态函数的函数值与所述第二期望姿态的差值,得到姿态差值;
20、基于所述姿态差值,计算关于所述第二待解算轴和所述第三待解算轴的关节角度增量;
21、判断所述关节角度增量是否属于预设的精度范围;
22、若是,则将所述第二待解算轴和所述第三待解算轴的待定关节角度分别作为其参考关节角度;
23、若否,则利用所述第二待解算轴和所述第三待解算轴的待定关节角度以及所述关节角度增量,确定所述第二待解算轴和所述第三待解算轴的新的待定关节角度后,重新执行所述基于所述第二待解算轴和所述第三待解算轴的待定关节角度,计算所述第二姿态函数的函数值的步骤,直至所述关节角度增量属于预设的精度范围,得到所述第二待解算轴和所述第三待解算轴的参考关节角度。
24、在可选的实施方式中,所述基于所述姿态差值,计算关于所述第二待解算轴和所述第三待解算轴的关节角度增量的步骤,包括:
25、基于所述姿态差值以及所述第二待解算轴和所述第三待解算轴的待定关节角度,计算关于所述第二待解算轴和所述第三待解算轴的雅克比矩阵;
26、按照预设公式,基于所述姿态差值和所述雅克比矩阵,计算所述关节角度增量;
27、所述预设公式如下:
28、δq2356=(jtj)-1(jtdy);
29、其中,δq2356表示关节角度增量;j表示雅克比矩阵;dy表示姿态差值。
30、在可选的实施方式中,所述基于所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度对所述第一期望姿态进行调整得到第一实际姿态,并基于所述第一实际姿态和所述第一期望位置确定每个关节轴的实际关节角度的步骤,包括:
31、基于所述第一姿态函数和所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度确定第一实际姿态,并将所述第一待解算轴的参考关节角度作为第一个关节轴的实际关节角度,以及将所述第三待解算轴的参考关节角度作为第六个关节轴的实际关节角度;
32、基于所述第一实际姿态、所述第一期望位置和第一个关节轴的实际关节角度,确定第二个关节轴的实际关节角度;
33、基于第二个关节轴的实际关节角度,确定第三个关节轴的实际关节角度;
34、基于第二个关节轴的实际关节角度、第三个关节轴的实际关节角度以及所述第二待解算轴的参考关节角度,确定第五个关节轴的实际关节角度。
35、第二方面,本发明提供一种五轴机器人的逆解装置,所述五轴机器人包含依次连接的六个关节轴且第四个关节轴为虚拟轴,所述五轴机器人的第二个关节轴、第三个关节轴和第五个关节轴的旋转轴线平行,所述五轴机器人的逆解装置包括:
36、构建模块,用于基于五轴机器人的运动学模型,构建所述五轴机器人的末端的第一姿态函数;所述第一姿态函数表示在第四个关节轴的关节角度为零的情况下,所述末端相对于第一个关节轴的姿态与第一待解算轴、第二待解算轴以及第三待解算轴的关节角度的关系,所述第一待解算轴为第一个关节轴,所述第二待解算轴是通过将第二个关节轴、第三个关节轴以及第五个关节轴视作一个整体得到的,所述第三待解算轴为第六个关节轴;
37、计算模块,用于基于所述第一姿态函数和用户设定的所述末端相对于第一个关节轴的第一期望位置和第一期望姿态,计算所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度;所述五轴机器人按照所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度转动后,所述末端相对于第一个关节轴的姿态与所述第一期望姿态的差异满足预设条件;
38、确定模块,用于基于所述第一待解算轴、所述第二待解算轴以及所述第三待解算轴的参考关节角度对所述第一期望姿态进行调整得到第一实际姿态,并基于所述第一实际姿态和所述第一期望位置确定每个关节轴的实际关节角度。
39、在可选的实施方式中,所述计算模块还用于:
40、基于所述第一期望位置,计算所述第一待解算轴的参考关节角度;
41、基于所述第一待解算轴的参考关节角度,计算第二个关节轴相对于第一个关节轴的姿态;
42、基于所述第一期望姿态和所述第二个关节轴相对于第一个关节轴的姿态,计算所述末端相对于第二个关节轴的第二期望姿态;
43、基于所述第一姿态函数和所述第二个关节轴相对于第一个关节轴的姿态,得到所述末端的第二姿态函数;所述第二姿态函数表示所述末端相对于第二个关节轴的姿态与所述第二待解算轴和所述第三待解算轴的关节角度的关系;
44、基于所述第二姿态函数和所述第二期望姿态,计算所述第二待解算轴和所述第三待解算轴的参考关节角度。
45、第三方面,本发明提供一种电子设备,包括处理器和存储器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时,实现前述实施方式中任一项所述的五轴机器人的逆解方法。
46、第四方面,本发明提供一种存储介质,所述存储介质上存储有计算机程序,该计算机程序被处理器执行时,实现前述实施方式中任一项所述的五轴机器人的逆解方法。
47、本发明提供的五轴机器人的逆解方法、装置、电子设备和存储介质,五轴机器人包含依次连接的六个关节轴且第四个关节轴为虚拟轴,五轴机器人的第二个关节轴、第三个关节轴和第五个关节轴的旋转轴线平行;该方法包括:首先基于五轴机器人的运动学模型,构建五轴机器人的末端的第一姿态函数,第一姿态函数表示在第四个关节轴的关节角度为零的情况下末端的姿态与第一待解算轴、第二待解算轴以及第三待解算轴的关节角度的关系,第一待解算轴为第一个关节轴,第二待解算轴是通过将第二个关节轴、第三个关节轴以及第五个关节轴视作一个整体得到的,第三待解算轴为第六个关节轴;然后基于第一姿态函数和用户设定的末端的第一期望位置和第一期望姿态,计算第一待解算轴、第二待解算轴以及第三待解算轴的参考关节角度;最后基于第一待解算轴、第二待解算轴以及第三待解算轴的参考关节角度对第一期望姿态进行调整得到第一实际姿态,并基于第一实际姿态和第一期望位置确定每个关节轴的实际关节角度。从而实现了在水平面码垛和非水平面码垛场景下,都可以确定出五轴机器人中每个关节轴的关节角度且第四个关节轴的关节角度恒定为零,提高了五轴机器人进行码垛作业的效率和稳定性。
48、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!