一种用于汽车全景影像系统的标定场地及标定方法与流程
本发明涉及到汽车领域,尤其涉及到一种用于汽车全景影像系统的标定场地及标定方法。
背景技术:
1、随着图像和计算机视觉技术被越来越多的应用到汽车电子领域,传统的基于图像的倒车影像系统只在车尾安装摄像头,只能在倒车过程中实时查看车尾周围有限的区域的影像,而车辆左右周围和车头无法查看的影像盲区,将增加安全驾驶的隐患,且在狭隘拥堵的市区、窄道和停车场容易出现碰撞与刮蹭事件。全景影像系统作为一种新型智能化泊车辅助系统,被越来越多地搭载应用于当前车厂新推出的车型当中。但在车厂实际批量生产时,因生产工艺、总装工艺等因素,每个车辆的摄像头都存在不同的个体及安装误差,同时现有汽车全景影像系统对汽车四角远离摄像头的位置容易产生畸变,造成图像矫正不准,因此在生产过程中需要对每一辆车都进行自动标定校正,以便全景影像系统能够以自动标定方式,纠正因生产工艺、总装工艺等因素对图像显示及拼接效果造成的影响,因此亟需一种用于汽车全景影像系统的标定场地及标定方法。
技术实现思路
1、本发明的目的在于提出一种用于汽车全景影像系统的标定场地及标定方法,以解决现有技术中全景影像系统对汽车四角远离摄像头的位置容易产生畸变,造成图像矫正不准的问题。
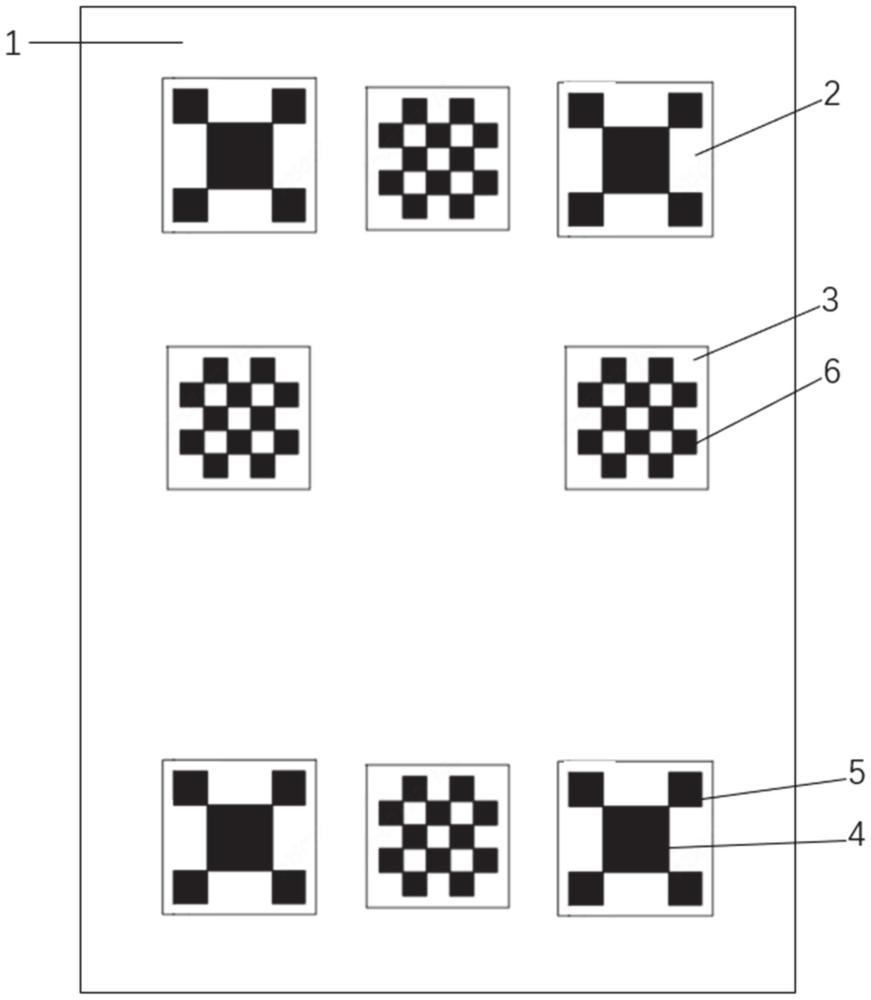
2、一种用于汽车全景影像系统的标定场地,包括,黑白棋盘格图案,所述黑白棋盘格图案设于汽车所在地面四周,由多个正方形棋盘格组成,包括四个角棋盘格图案和多个小棋盘格图案,所述角棋盘格图案分别设置在黑白棋盘格图案的四角,所述小棋盘格图案设于两个角棋盘格图案之间,所述小棋盘格图案分别与汽车四周设置的鱼眼摄像头位置对应,所述角棋盘格图案包括中间格和周围格,所述中间格设置至于所述角棋盘格图案中心位置,所述中间格的面积大于所述周围格的面积。
3、可选的,所述小棋盘格图案由多个面积相等的小棋盘格组成,所述小棋盘格面积小于所述周围格的面积。
4、可选的,每个角棋盘格图案分别有一个中间格和四个周围格。
5、可选的,四个所述周围格分别设置在所述中间格的四周,与所述中间格对角设置。
6、可选的,还包括光源,所述光源安装于所述标定场地正上方3米至5米处。
7、可选的,所述光源的光照为漫反射;环境亮度值300lux-1000lux之间;且任意两个点的亮度差值小于100lux。
8、一种用于汽车全景影像系统的标定方法,包括以下步骤:
9、s1、将汽车停放在所述的标定场地上;
10、s2、启动汽车全景影像系统,并选择自动标定功能;
11、s3、汽车四周摄像头分别拍摄标定场地四面图像,发送给汽车全景影像系统;
12、s4、汽车全景影像系统将图像分别与标定场地图映射校正,将映射校正的图像进行融合拼接成一张标定场地鸟瞰图;
13、s5、将标定场地鸟瞰图与标定场地图进行映射校正,以中间格为主要基准点,计算并校正周围格以及无图案位置的异常点位图像,得到完整的汽车全景影像;
14、s6、汽车全景影像系统通过显示屏或无线通信模块将相关信息反馈给用户,并判定是否完成标定。
15、可选的,在步骤s4中,汽车全景影像系统按照前后左右的顺序将图像分别与标定场地图映射校正,调整异常点位,得到前后左右四张标定场地图像。
16、可选的,在步骤s4中,将前后左右四张标定场地图像重合的点位进行融合,拼接成一张标定场地鸟瞰图。
17、可选的,在步骤s5中,汽车全景影像系统以中间格的边线为基准,校正异常点位图像的周围格的边线位置,计算无图案位置的边线。
18、与现有技术相比,本发明具有以下有益效果:
19、1、本发明一种用于汽车全景影像系统的标定场地及标定方法,通过设置中间格和周围格,使汽车全景影像系统在远离汽车鱼眼摄像头的位置确定中间格为基准点,减少图像畸变。
20、2、本发明一种用于汽车全景影像系统的标定场地及标定方法,通过设置多个小棋盘格,提高了汽车鱼眼摄像头识别元素的丰富度,使拍摄拼接更清晰。
21、3、本发明一种用于汽车全景影像系统的标定场地及标定方法,通过角棋盘格图案和小棋盘格图案的设置,减少的棋盘格的设置并且提高了拍摄拼接的准确性。
技术特征:
1.一种用于汽车全景影像系统的标定场地,其特征在于,包括,
2.根据权利要求1所述的标定场地,其特征在于,所述小棋盘格图案(3)由多个面积相等的小棋盘格(6)组成,所述小棋盘格(6)面积小于所述周围格(5)的面积。
3.根据权利要求1所述的一种用于汽车全景影像系统的标定场地,其特征在于,每个角棋盘格图案(2)分别有一个中间格(4)和四个周围格(5)。
4.根据权利要求3所述的一种用于汽车全景影像系统的标定场地,其特征在于,四个所述周围格(5)分别设置在所述中间格(4)的四周,与所述中间格(4)对角设置。
5.根据权利要求1所述的一种用于汽车全景影像系统的标定场地,其特征在于,还包括光源,所述光源安装于所述标定场地正上方3米至5米处。
6.根据权利要求5所述的一种用于汽车全景影像系统的标定场地,其特征在于,所述光源的光照为漫反射;环境亮度值300lux-1000lux之间;且任意两个点的亮度差值小于100lux。
7.基于权利要求1的一种用于汽车全景影像系统的标定方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种用于汽车全景影像系统的标定方法,其特征在于,在步骤s4中,汽车全景影像系统按照前后左右的顺序将图像分别与标定场地图映射校正,调整异常点位,得到前后左右四张标定场地图像。
9.根据权利要求8所述的一种用于汽车全景影像系统的标定方法,其特征在于,在步骤s4中,将前后左右四张标定场地图像重合的点位进行融合,拼接成一张标定场地鸟瞰图。
10.根据权利要求7所述的一种用于汽车全景影像系统的标定方法,其特征在于,在步骤s5中,汽车全景影像系统以中间格(4)的边线为基准,校正异常点位图像的周围格(5)的边线位置,计算无图案位置的边线。
技术总结
本发明涉及到汽车领域,尤其涉及到一种用于汽车全景影像系统的标定场地及标定方法。包括黑白棋盘格图案,黑白棋盘格图案设于汽车所在地面四周,由多个正方形棋盘格组成,包括四个角棋盘格图案和多个小棋盘格图案,角棋盘格图案分别设置在黑白棋盘格图案的四角,小棋盘格图案设于两个角棋盘格图案之间,小棋盘格图案分别与汽车四周设置的鱼眼摄像头位置对应,角棋盘格图案包括中间格和周围格,中间格设置至于角棋盘格图案中心位置,中间格的面积大于周围格的面积。现有汽车全景影像系统对汽车四角远离摄像头的位置容易产生畸变,造成图像矫正不准,亟需一种用于汽车全景影像系统的标定场地及标定方法。
技术研发人员:胡雪雪
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!