一种基于电数字数据处理技术计算目标识别率区间的方法与流程
本发明属于电数字数据处理,特别是指一种对通信信号、sar雷达和光电三类异构传感器系统目标识别率区间进行计算的方法,能够有效支撑这三类异构传感器系统的运用规划。
背景技术:
1、随着大量光电、sar雷达、震动、红外,以及通信信号探测等异构传感器广泛综合用于对目标的识别,系统会对各类异构传感器的目标识别结果进行关联和融合处理,以提升系统对目标识别整体精度。
2、目前传感器系统对于目标识别的相关发明主要集中于识别处理方法的具体实现方面。公开号为cn114943881a的专利申请公开了一种目标融合评价方法、装置、计算机可读存储介质及电子设备,该方法基于目标融合位置信息,生成目标障碍物的评价信息集合,并显示评价信息集合,定量地对目标融合的效果进行分析,同时可以显示评价信息,使用户可以直观地查看目标融合的效果;公开号为cn108765394b的专利公开了一种基于质量评价的目标识别方法,在对视频质量评价中增加了帧间的关联信息,从而获得更多的有效目标信息,使得视频中目标的表征更加准确,提升了识别精度。
3、当前,多传感器系统针对目标识别率的研究,一方面主要集中在同构传感器系统而由于异构传感器目标定位、目标识别的精度差异较大,研究的较少;另一方面目前系统对目标识别率的计算,主要依靠事后对采集数据进行统计分析,造成事前缺乏有效的方法实现对系统目标识别率的预评估,使异构传感器系统的规划运用缺乏计算支撑。
技术实现思路
1、有鉴于此,本发明提出了一种基于电数字数据处理技术,对包含三类异构传感器系统的目标识别率区间的计算方法。本发明通过针对通信信号探测、sar雷达探测和光电探测三类异构传感器已知的目标定位精度、目标检出度和目标识别率,计算这三类异构传感器系统的目标识别率区间,有效支撑这三类异构传感器的使用规划。
2、本发明采用的技术方案为:
3、一种基于电数字数据处理技术计算目标识别率区间的方法,包括以下过程:
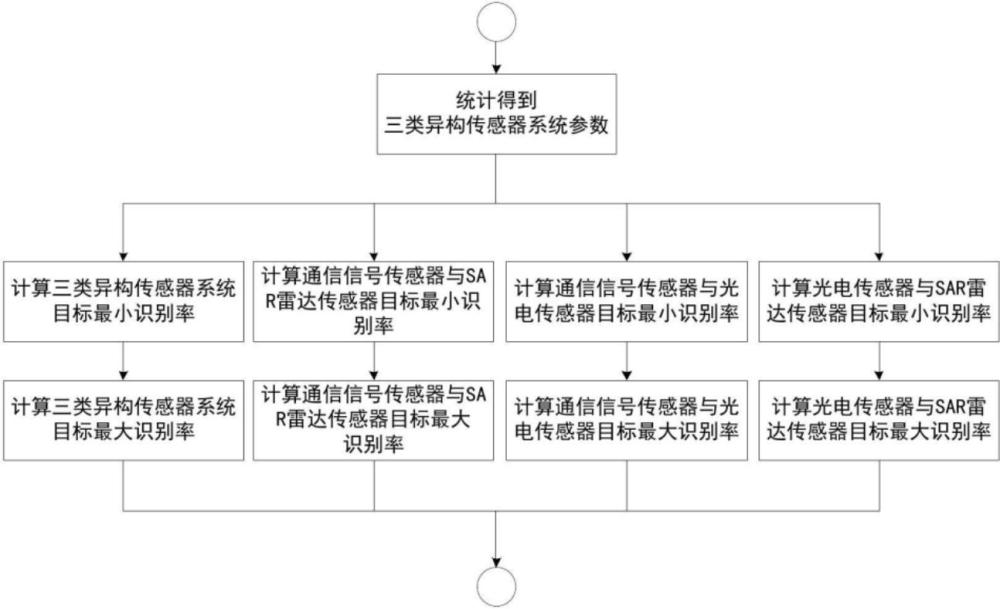
4、构建通信信号、sar雷达和光电三类异构传感器系统参数集合,包括三类异构传感器各自目标检出率、各自目标识别率、各自目标最大定位误差和各自目标最小定位误差;
5、根据通信信号、sar雷达和光电三类异构传感器各自目标检出率和各自目标识别率,计算三类异构传感器系统的目标最小识别率和目标最大识别率;
6、根据通信信号传感器与sar雷达传感器各自目标最大定位误差和最小定位误差分别计算两传感器关联融合识别成功率,并结合各自目标检出率和识别率分别计算两类传感器各自在目标关联融合识别算法支撑下的最低目标识别率和最高目标识别率;
7、根据通信信号传感器与光电传感器各自目标最大定位误差和最小定位误差分别计算两传感器关联融合识别成功率,并结合各自目标检出率和识别率分别计算两类传感器各自在目标关联融合识别算法支撑下的最低目标识别率和最高目标识别率;
8、根据光电传感器和sar雷达传感器各自目标最大定位误差和最小定位误差分别计算两传感器关联融合识别成功率,并结合各自目标检出率和识别率分别计算两类传感器各自在目标关联融合识别算法支撑下的最低目标识别率和最高目标识别率。
9、进一步的,构建通信信号、sar雷达和光电三类异构传感器系统参数集合,包括三类异构传感器各自目标检出率、各自目标识别率、各自目标最大定位误差和各自目标最小定位误差;具体过程为:
10、统计历史检测数据得到通信信号、sar雷达和光电三类异构传感器各自目标检出率,表示单独使用通信信号传感器的目标检出率,表示单独使用sar雷达传感器的目标检出率,表示单独使用光电传感器的目标检出率;
11、统计历史检测数据得到三类异构传感器各自目标识别率,表示单独使用通信信号传感器的目标识别率,表示单独使用sar雷达传感器的目标识别率,表示单独使用光电传感器的目标识别率;
12、统计历史检测数据得到三类异构传感器各自目标最大定位误差,表示单独使用通信信号传感器的目标最大定位误差,其中r是通信信号传感器与被测目标的距离,表示单独使用sar雷达传感器的目标最大定位误差,表示单独使用光电传感器的目标最大定位误差;
13、统计历史检测数据得到三类异构传感器各自目标最小定位误差,表示单独使用通信信号传感器目标最小定位误差,其中r是通信信号传感器与被测目标的距离,表示单独使用sar雷达传感器的目标最小定位误差,表示单独使用光电传感器的目标最小定位误差。
14、进一步的,根据通信信号、sar雷达和光电三类异构传感器各自目标检出率和各自目标识别率,计算三类异构传感器系统的目标最小识别率和目标最大识别率;具体过程为:
15、计算通信信号、sar雷达和光电三类异构传感器系统的目标最小识别率,目标最小识别率不小于单独使用某一传感器的目标识别率,即
16、;
17、计算通信信号、sar雷达和光电三类异构传感器系统的目标最大识别率,目标最大识别率不大于三类异构传感器都未检出目标的概率,即:
18、。
19、进一步的,根据通信信号传感器与sar雷达传感器各自目标最大定位误差和最小定位误差分别计算两传感器关联融合识别成功率,并结合各自目标检出率和识别率分别计算两类传感器各自在目标关联融合识别算法支撑下的最低目标识别率和最高目标识别率;具体过程为:
20、步骤3-1,在通信信号传感器与sar雷达传感器同处定位误差最大情况时,关联融合后的目标识别率最低,两传感器关联融合识别成功率计算如下:
21、其中,为使用目标关联融合识别算法时关联融合识别成功率与随机关联融合识别成功率的比,在没有算法支撑情况下,取1;
22、步骤3-2,分别计算两类传感器在目标关联融合识别算法支撑下的最低目标识别率:
23、
24、
25、步骤3-3,取,为通信信号传感器与sar雷达传感器在目标关联融合识别算法支撑下的最低目标识别率;
26、步骤3-4,在通信信号传感器与sar雷达传感器定位误差最小情况下,关联融合后的目标识别率最高,两传感器关联融合识别成功率计算如下:
27、;
28、步骤3-5,分别计算两类传感器在目标关联融合识别算法支撑下的最高目标识别率:
29、
30、
31、步骤3-6,取为通信信号传感器与sar雷达传感器在目标关联融合识别算法支撑下的最高目标识别率。
32、进一步的,根据通信信号传感器与光电传感器各自目标最大定位误差和最小定位误差分别计算两传感器关联融合识别成功率,并结合各自目标检出率和识别率分别计算两类传感器各自在目标关联融合识别算法支撑下的最低目标识别率和最高目标识别率;具体过程为:
33、步骤4-1,在通信信号传感器与光电传感器同处定位误差最大情况时,关联融合后的目标识别率最低,两传感器关联融合识别成功率计算如下:
34、
35、其中,为使用目标关联融合识别算法时,关联融合识别成功率与随机关联融合识别成功率的比,在没有算法支撑情况下,取1;
36、步骤4-2,分别计算两类传感器在目标关联融合识别算法支撑下的最低目标识别率:
37、
38、;
39、步骤4-3,取为通信信号传感器与光电传感器在目标关联融合识别算法支撑下的最低目标识别率;
40、步骤4-4,在通信信号传感器与光电传感器定位误差最小情况下,关联融合后的目标识别率最高,两传感器关联融合识别成功率计算如下:
41、;
42、步骤4-5,分别计算两类传感器在目标关联融合识别算法支撑下的最高目标识别率:
43、
44、;
45、步骤4-6,取为通信信号传感器与光电传感器在目标关联融合识别算法支撑下的最高目标识别率。
46、进一步的,根据光电传感器和sar雷达传感器各自目标最大定位误差和最小定位误差分别计算两传感器关联融合识别成功率,并结合各自目标检出率和识别率分别计算两类传感器各自在目标关联融合识别算法支撑下的最低目标识别率和最高目标识别率;具体过程为:
47、步骤5-1,在光电传感器与sar雷达传感器同处定位误差最大情况时,关联融合目标识别率最低,两传感器关联融合识别成功率计算如下:
48、
49、其中,为使用目标关联融合识别算法时,关联融合识别成功率与随机关联融合识别成功率的比,在没有算法支撑情况下,取1;
50、步骤5-2,分别计算两类传感器在目标关联融合识别算法支撑下最低目标识别率:
51、
52、;
53、步骤5-3,取为光电传感器与sar雷达传感器在目标关联融合识别算法支撑下的最低目标识别率;
54、步骤5-4,在光电传感器与sar雷达传感器定位误差最小情况下,关联融合目标识别率最高,两传感器关联融合识别成功率计算如下:
55、;
56、步骤5-5,分别计算两类传感器在目标关联融合识别算法支撑下的最高目标识别率:
57、
58、;
59、步骤5-6,取为光电传感器与sar雷达传感器在目标关联融合识别算法支撑下的最高目标识别率。
60、本发明具有以下有益效果:
61、1、本发明针对通信信号、sar雷达和光电三类异构传感器已知的目标定位精度、检出度和目标识别率,计算使用这三类异构传感器系统的目标识别率区间,有效支撑三类异构传感器的联合运用规划;
62、2、本发明计算通信信号传感器与sar雷达传感器在目标关联融合识别算法支撑下的目标识别率区间,有效支撑通信信号传感器与sar雷达传感器的联合运用规划;
63、3、本发明计算通信信号传感器与光电传感器在目标关联融合识别算法支撑下的目标识别率区间,有效支撑通信信号传感器与光电传感器的联合运用规划;
64、4、本发明计算光电传感器与sar雷达传感器在目标关联融合识别算法支撑下的目标识别率区间,有效支撑光电传感器与sar雷达传感器的联合运用规划;
65、5、本发明通过计算异构传感器系统的目标识别率区间,能够支撑评估所使用目标关联融合识别算法的能力。
- 还没有人留言评论。精彩留言会获得点赞!