一种长途汽车动态时刻测算方法与流程
本发明涉及长途班线客运长途汽车的时刻表获取方法,更具体地涉及一种实时获取长途班线客运长途汽车运行动态时刻表以及乘客实时位置信息,以及精准识别乘客到站时间的方法。
背景技术:
1、近年来,随着计算机、网络技术在公路、铁路、民航道路客运领域应用范围的逐渐扩展,对出行的精确规划已经成为常态。然而,相比在封闭体系中运行的火车、飞机,由于长途汽车与其他社会长途汽车共享行驶路径,其行驶时间受路况、事故、天气等因素影响较大,因此难以编制确定的长途汽车行程时间、里程表,导致乘客只能获知上车的时间,却难以确切得知到站的准确时间,更不可能随时获知长途汽车当前行进位置,是否晚点,抵达目的地所需时间等。这严重影响了客运乘客的出行体验,更在提前规划行程、接驳转乘以及与多种交通工具联程联运等方面产生障碍。可见,缺乏精准的长途汽车到站时间精准计算机制,已经成为了道路客运的最大痛点之一。
2、为解决上述问题,根据本发明的实施方式提供了一种长途汽车动态时刻测算方法。
技术实现思路
1、根据本发明的实施方式利用全国营运长途汽车联网联控系统的长途班线客运长途汽车gps监测数据,结合道路客运联网售票系统中的班次、票务数据,提供了一种长途汽车动态时刻测算方法,从而实时获取长途班线客运长途汽车运行动态时刻表以及乘客实时位置信息,在此基础上,预测长途汽车到达特定客运站时间、待行驶里程和时长,实现服务于乘客的智慧出行和精准规划。
2、为实现上述发明目的,根据本发明的实施方式提供的长途汽车动态时刻测算方法包括以下步骤:
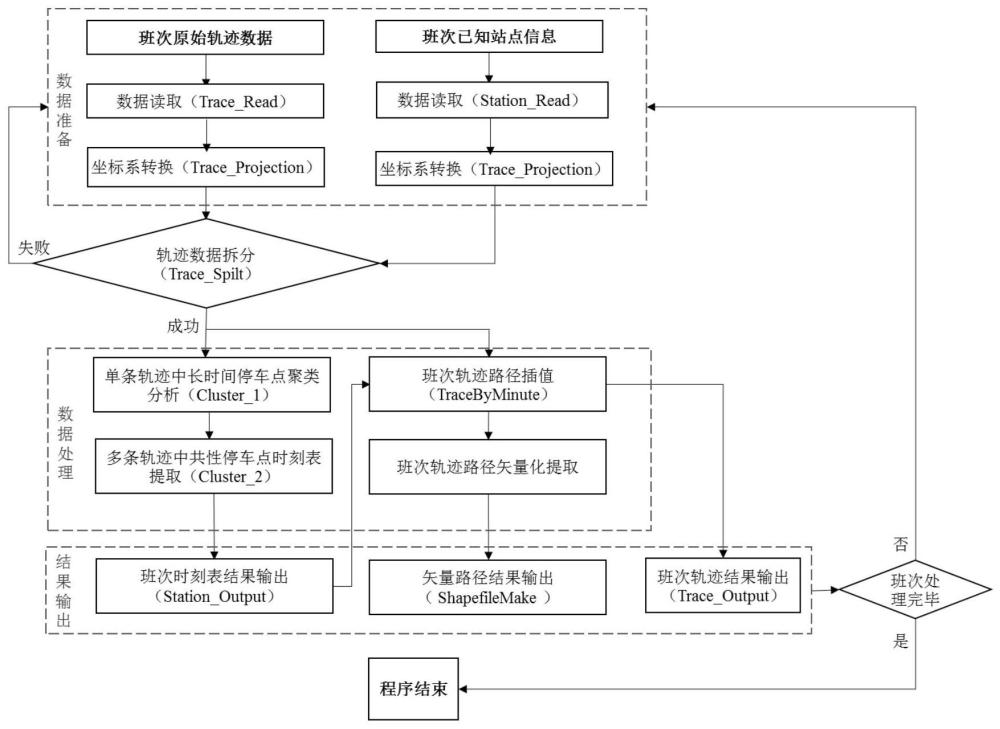
3、s1:gps数据预处理:获得长途汽车的历史gps数据,并通过两级缓冲区法粗筛和方程式缓冲区法精筛,对长途汽车的gps数据进行预处理,清洗掉漂移或异常的数据;
4、s2:长途汽车行驶轨迹精准识别:根据长途汽车班次表中的车牌号信息,从上述经预处理的gps数据中提取长途汽车轨迹数据,识别和剔除时间紊乱点、异常定位点、临时停车点与长时停车点,得到精确轨迹数据并生成精确轨迹路线图;
5、s3:客运站精准位置提取:依据s2处理得到的长途汽车精确轨迹数据识别出长时间停车数据,通过聚类算法汇总大量长途汽车数据,提取共性停车位置,即客运站(停车点)位置,再将该客运站位置与班次经停表数据库中的相应班次经停表、第三方电子地图地名poi(兴趣点)数据库进行比对,确认所提取的各客运站位置(即共性停车位置)与班次经停表中经停站的名称的对应关系;
6、s4:动态时刻表生成:在确定班次经停表中各经停站的名称与客运站位置的对应关系后,即可按照班次行驶路线,以一定的时间间隔记录采样点,记录长途汽车的经纬度、计划到达时刻、从起点出发的行驶时间、从起点出发行驶里程及该采样点对应的经停站,在数据库中生成特定班次对应的动态里程-时刻表格,其中上述记录采样点的时间间隔根据需要可以选择例如1-5分钟,该采样时间间隔可与路段平均车速相关,原则上车速越快,采样点间隔越小;
7、s5:乘客在途位置与到站时间精准预测:通过用户前端设备(例如,手机、平板电脑、笔记本电脑、智能手表等)的实时gps定位数据或者长途汽车的车载gps实时数据接口获取乘客实时位置后,与所述动态里程-时刻表中计划到达站的时刻和长途汽车行驶里程数据比较,计算得到长途汽车到达特定目的地站点的时间。
8、在可选的实施方式中,在所述步骤s1中,对长途汽车gps数据进行两级缓冲区法过滤包括:
9、根据道路和长途汽车状况和参数设定大缓冲区和小缓冲区范围;
10、通过大缓冲区高速粗筛,剔除远离目标道路的长途汽车数据;
11、通过小缓冲区细筛,剔除与道路距离较近,但不在道路上的长途汽车数据。
12、在可选的实施方式中,在所述步骤s1中,对长途汽车gps数据进行方程式缓冲区法精筛包括:
13、点(x0,y0)的缓冲区为
14、
15、其中r是缓冲区半径;
16、线段((x1,y1),(x2,y2))的缓冲区为
17、
18、其中
19、
20、其中,r是缓冲区半径,l为线段的长度,t为向量((x1,y1),(x2,y2))与x轴的夹角。(xm,ym)为线段的中点,ρ=m/l是线段的线密度;
21、常规缓冲区为点的缓冲区,从里到外缓冲区半径分别为20m、40m、60m、80m,方程式缓冲区为线段的缓冲区,线段长400m,从里到外缓冲区半径分别为40m、80m、120m、160m;
22、查询在缓冲区内的地理要素步骤如下:
23、点缓冲区判断,判断某要素点t(xt,yt)是否在点a(x0,y0)半径为r的缓冲区内时,将要素坐标代入公式(1)中得到若不等式成立,则要素点t在点a的缓冲区内;若不成立,则要素点t在点a的缓冲区外;
24、线段缓冲区判断,判断某要素点t(xt,yt)是否在线段ab半径为r的缓冲区内,a、b的坐标分别为(x1,y1),(x2,y2),将要素坐标代入公式(2)中得到若该不等式成立,则要素点t在线段ab的缓冲区内;若该不等式不成立,则要素点t在线段ab的缓冲区外;
25、曲线缓冲区判断,曲线坐标为q(p1,p2,…,pn),判断某要素点t(xt,yt)是否在该曲线的半径为r的缓冲区内时,需要将要素坐标代入曲线所有子线段ptpt+1,t=1,2,…,n-1)的缓冲区不等式中进行判断,只要有一个不等式成立,则要素点t在曲线q的缓冲区内,反之则不在曲线q的缓冲区内。
26、在可选的实施方式中,所述客运站精准位置提取步骤进一步包括以下步骤:
27、坐标系转换:将gps定位数据从地理坐标系转换到投影坐标系;
28、停车定位点筛选:从原始数据中筛选出速度零值点,为了剔除偶发因素导致的速度零值点,添加距离、方向指标作为筛选条件,筛选出停车定位点;
29、停车定位点聚类:使用db-scan算法对筛选出的停车定位点进行分类,将高密度的定位点集划分到同一类中,分类后得到若干个点簇,并剔除噪声点;
30、聚类中心计算:对任一个点簇ci,提取簇心pi(xpi,ypi),并通过车牌号字段统计点簇包含的长途汽车数vni,得到簇心集合s;
31、客运站位置提取:将s中距离较近的簇心归并到同一类中,得到s的多个子集sk,使sk中任意两个簇心的距离不超过dc,合并sk中的簇心,得到新的簇心(xsk,ysk),合并后剔除长途汽车数量小于nmin或与道路中线距离小于dr的簇心,剩下的簇心即为客运站;
32、根据所述客运站位置与班次经停表数据库、第三方电子地图地名poi数据库进行比对,确认各客运站位置与班次经停表中经停站名称的对应关系,获得客运站精准位置。
33、在可选的实施方式中,所述乘客在途位置与到站时间精准预测步骤进一步包括以下步骤:
34、获取乘客在途位置后,根据依照票务信息关联到的班次数据,查询对应班次的动态里程-时刻表;
35、利用勾股法计算动态里程-时刻表中与当前位置最接近的记录,设当前点位置(xc,yc),即在动态里程-时刻表中查找点(xi,yi),使
36、δdc-i=[(xc-xi)2+(yc-yi)2]1/2为最小,
37、即可确定长途汽车当前在班次轨迹上的位置;
38、接着根据点(xi,yi)对应的时刻和长途汽车行驶里程数据,与动态里程-时刻表中计划到达站的时刻和长途汽车行驶里程数据比较,计算得到长途汽车到达特定目的地站点的时间,以及在长途汽车到达目的地站点前的一定时间,向乘客发送提醒信息。
39、根据本发明的实施方式所提供的长途汽车动态时刻测算方法,通过实时获取长途班线客运长途汽车运行动态时刻表以及乘客实时位置信息,在此基础上,精确预测长途汽车到达特定客运站时间、待行驶里程,服务于乘客的智慧出行和精准规划。该方法整合全国长途汽车轨迹大数据,开发精准有效的长途汽车到达时间预测方法,建立覆盖全国范围的道路客运班线精准化时刻表体系并定期更新,推广长途汽车到达时间预测(车到哪儿)服务,解决长期制约道路客运接联程联运与接驳运输工作的“到站时间未知”问题,为推广跨交通方式联程联运服务,提升道路客运行业服务质量,推广精准化服务奠定坚实的基础。
40、通过参考附图和以下说明,本发明的其它装置、设备、系统、方法、特征和优点将是明显的。包括在本说明书中的所有的另外的这种系统、方法、特征和优点都在本发明的范围内,且由所附权利要求保护。
- 还没有人留言评论。精彩留言会获得点赞!