遥感影像变化检测方法及装置与流程
本发明属于遥感图像信息识别与检测,具体地说,涉及遥感影像变化检测方法及装置。
背景技术:
1、遥感影像地物信息变化检测是遥感影像信息识别的重要工作内容之一,在国土监察、环境检测、土壤侵蚀调查等方面具有重要意义。遥感图像分类一般包括三个层次:像元级、特征级和对象级。其中,差值法、比值法和回归分析法是像元级层次的常见方法,此类方法特别容易受到遥感卫星传感器精度的影响;特征级变化检测是基于从影像中提取的特征如纹理、颜色和形状等进行检测,常见的有支持向量机和随机森林分类法;对象级变化检测则是首先对影像进行分割,再创建一系列代表地面实体的对象,然后对这些对象进行比对。另外,近年来随着人工智能技术的快速发展,深度学习在遥感图像变化检测领域也得到了广泛的应用。但上述方法均存在一定的不足,分别如下:
2、差值、比值法:受卫星传感器温度性影响大,仅考虑单个或部分像元值的变化,未考虑像元极值的空间变化,适用性不强;
3、支持向量机、随机森林分类:需要针对特定的遥感影像选择合适的特征,特征提取和构建效率差、移植性弱;
4、基于对象的图像分析:需要对影像进行分割,提取特定对象,计算方法复杂,对象提取精度对变化检测结果影响极大;
5、深度学习模型:需构建样本数据库,样本数据标注工作繁重,构建好的模型不适用于其他卫星遥感数据源,方法可解释性不足。
技术实现思路
1、本发明的第一目的在于克服现有技术的缺点与不足,提供一种基于图像极值空间分布的遥感影像变化检测方法,解决了现有遥感影像变化监测方法过分依赖高质量卫星数据源、多采用影像多波段像元绝对值变化率评价指标以及需要构建大量的样本数据的问题。
2、本发明的第二目的在于提供遥感影像变化检测装置。
3、本发明的目的通过下述技术方案实现:遥感影像变化检测方法,包括步骤:
4、s1、获取两期遥感影像,并对所述遥感影像进行预处理;
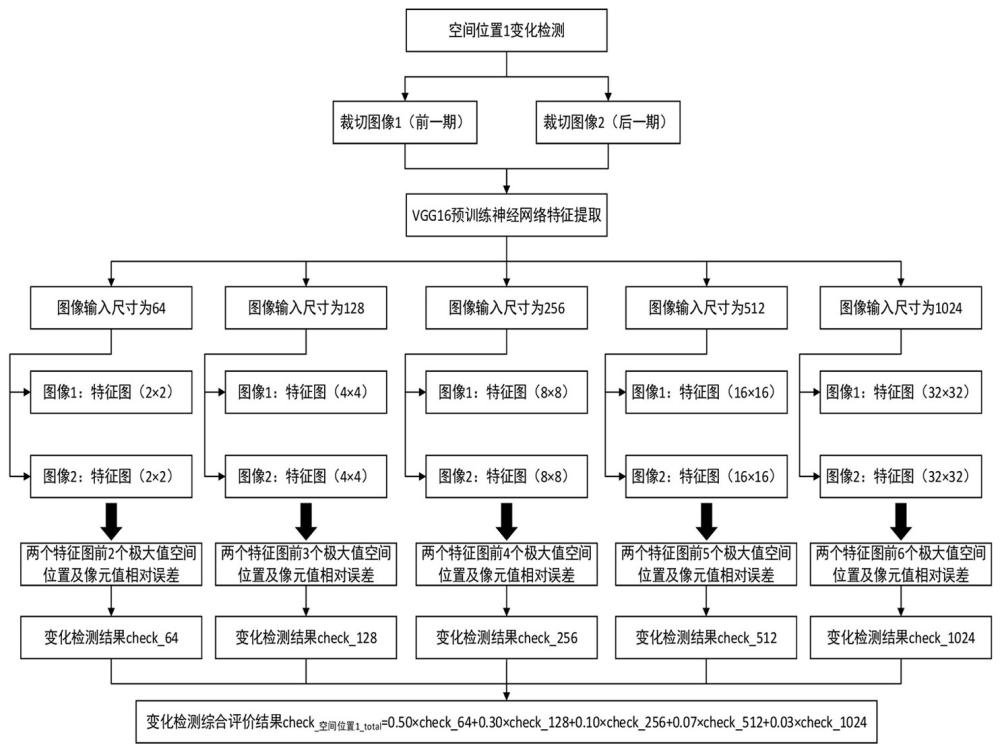
5、s2、对两期预处理的遥感影像的待检测区域进行裁切,得到位置影像集合,位置影像集合的每组位置影像包括两期预处理的遥感影像;
6、s3、采用预训练的神经网络分别对每组位置影像进行特征提取,通过对每组位置影像设置n个输入尺寸,得到相对应压缩尺寸的特征图组,所述特征图组包括两期特征图;
7、s4、根据特征图组的二维数组计算每个输入尺寸对应的特征图组的变化检测通过率,得到每组位置影像的n个特征图组的变化检测通过率,所述二维数组的数据包括像元极值和像元极值的空间位置信息;
8、s5、根据每组位置影像的n个特征图组的变化检测通过率,通过差异权重综合评价公式计算得到对应的位置影像的变化检测通过率;
9、s6、根据位置影像的变化检测通过率判断对应的空间位置地物信息是否变化,当位置影像的变化检测通过率满足变化判据,则判断对应的空间位置地物信息发生变化。
10、优选的,步骤s1中,所述预处理包括采用遥感影像空间配准方法对两期遥感影像进行配准。
11、优选的,步骤s2中,所述位置影像集合包括若干个空间区域的位置影像。
12、优选的,步骤s3中,所述神经网络包括vgg16卷积神经网络,步骤s3具体包括步骤:
13、s31、通过vgg16卷积神经网络对每组位置影像设置5个不同的输入尺寸,所述输入尺寸包括64、128、256、512和1024;
14、s32、分别输出对应压缩尺寸的特征图组,所述压缩尺寸包括2×2、4×4、8×8、16×16和32×32且与步骤s31的输入尺寸依次对应。
15、优选的,所述特征图组的二维数组包括前一期特征图数组和后一期特征图数组,前一期特征图数组和后一期特征图数组分别用arr1_q和arr2_q表示,其中q表示位置影像的输入尺寸,步骤s4具体包括:
16、s41、选取前一期特征图数组arr1_q和后一期特征图数组arr2_q的前s个像元极大值,s≥2;
17、s42、判断前一期特征图数组和后一期特征图数组的第t个像元极大值的空间位置是否发生变化,其中1≤t≤s,若是,将检测结果记为0,若否,将检测结果记为1;
18、s43、判断前一期特征图数组和后一期特征图数组的第t个像元极大值的相对误差是否满足第一期望精度m1,如式(1)所示,若是,将检测结果记为1,若否,将检测结果记为0:
19、abs(value1t_q- value2t_q)/ value1t_q×100%≤m1,式(1),
20、其中,value1t_q和 value2t_q分别表示输入尺寸为q时,前一期特征图组的第t个像元极大值和后一期特征图数组的第t个像元极大值;
21、s44、根据步骤s42- s43的检测结果计算特征图组的变化检测通过率:
22、check_q=(a×1)/(3×s),式(2),
23、其中,check_q表示输入尺寸为q时对应的特征图组的变化检测通过率,a表示检测结果为1的次数之和,s表示选取的像元极大值的个数。
24、优选的,步骤s42具体包括步骤:
25、s421、判断前一期特征图数组和后一期特征图数组的第t个像元极大值的行号坐标的误差绝对值是否满足第二期望精度m2,如式(3)所示,若是,则表示空间位置未变化并输出检测结果为1,若否,则表示空间位置变化并输出检测结果为0,判断公式如下:
26、abs(x1t-q- x2t-q)≤m2,式(3),
27、其中,x1t-q和x2t-q分别表示输入尺寸为q时,前一期特征图数组的第t个像元极大值的行号坐标和后一期特征图数组的第t个像元极大值的行号坐标;
28、s422、判断前一期特征图数组和后一期特征图数组的第t个像元极大值的列号坐标的误差绝对值是否满足第二期望精度m2,如式(4)所示,若是,则表示空间位置未变化并输出检测结果为1,若否,则表示空间位置变化并输出检测结果为0,判断公式如下:
29、abs(y1t-q-y2t-q)≤m2,式(4),
30、其中,y1t-q和y2t-q分别表示输入尺寸为q时,前一期特征图数组的第t个像元极大值的列号坐标和后一期特征图数组的第t个像元极大值的列号坐标。
31、优选的,步骤s5具体包括:
32、s51、对5个特征图组的变化检测通过率进行评价权重赋值:输入尺寸为64、128、256、512和1024对应的变化检测通过率的评价权重值分别为0.50、0.30、0.10、0.07和0.03;
33、s52、根据每组位置影像的5个变化检测通过率和所述评价权重值计算对应的位置影像的变化检测通过率,差异权重综合评价公式如式(5):
34、check_n_total=0.50×check_64+0.30×check_128+0.10×check_256+0.07×check_512+0.03×check_1024,式(5),
35、其中,check_n_total表示第n组位置影像的变化检测通过率,check_64、check_128、check_256、check_512和check_1024分别表示输入尺寸为64、128、256、512和1024对应的特征图组的变化检测通过率。
36、优选的,所述变化判据为:位置影像的变化检测率小于0.8,即check_n_total<0.8,则判断对应的空间位置地物信息发生变化。
37、优选的,所述第一期望精度m1的取值为50%,所述第二期望精度m2的取值范围为:0≤m2≤1。
38、遥感影像变化检测装置,包括:
39、获取图像模块,用于获取两期遥感影像,并对所述遥感影像进行预处理;
40、裁切模块,用于对两期预处理的遥感影像的待检测区域进行裁切,得到位置影像集合,位置影像集合的每组位置影像包括两期预处理的遥感影像;
41、特征提取模块,用于采用预训练的神经网络分别对每组位置影像进行特征提取,通过对每组位置影像设置n个输入尺寸,得到相对应压缩尺寸的特征图组,所述特征图组包括两期特征图;
42、第一计算模块,用于根据特征图组的二维数组计算每个输入尺寸对应的特征图组的变化检测通过率,得到每组位置影像的n个特征图组的变化检测通过率,所述二维数组的数据包括像元极值和像元极值的空间位置信息;
43、第二计算模块,用于根据每组位置影像的n个特征图组的变化检测通过率,通过差异权重综合评价公式计算得到对应的位置影像的变化检测通过率;
44、判断模块,用于根据位置影像的变化检测通过率判断对应的空间位置地物信息是否变化,当位置影像的变化检测通过率满足变化判据,则判断对应的空间位置地物信息发生变化。
45、本发明相对于现有技术具有如下的优点及效果:
46、(1)本发明首先获取需要开展变化检测的两期遥感影像,预处理并裁切后,通过预训练的神经网络(vgg16神经网络)提取特征图,通过输入不同输入尺寸得到不同压缩尺寸的特征图,根据这些特征图的像元极值的空间位置和像元极值计算同一压缩尺寸的两期特征图之间的变化检测通过率,最后通过差异权重综合评价公式计算对应的位置影像的变化结果。本发明适用于两期或者两期以上的遥感影像变化检测,本发明的方法实现了不同期遥感影像变化检测的自动化、批量化作业,有效克服现有的遥感影像变化检测方法的不足,不需要构建大量的标注样本数据,不高度依赖多遥感影像数据像元值的绝对稳定性,且能够最大程度避免少量云层覆盖对变化检测结果的影响。
47、(2)本发明的方法能够快速识别不同期的遥感影像在同一空间范围内是否存在地物信息的变化,为遥感影像地物识别及信息提取提供技术支持。
- 还没有人留言评论。精彩留言会获得点赞!