一种基于表面重合度和坡度的牙齿预备体误差评价方法
本发明专利涉及一种基于表面重合度和坡度的牙齿预备体误差评价方法,属于牙齿预备体评价。
背景技术:
1、龋齿是全球主要的公共卫生问题,是最普遍的非传染性疾病,龋齿是导致牙齿缺损、牙列缺损和牙齿缺失的重要原因。口腔修复是一种口腔医学的重要分支,而牙体预备是口腔修复的必要治疗环节。牙体预备的传统方法是医生在患者口腔内对患龋齿处的硬组织进行定量去除并预备出期望的三维形状牙齿预备体的过程,难以取得预期的精度效果;随着自动化技术的不断发展,后牙牙体预备的方式开始从传统的手工预备向高精度、高自动化的方向过渡,但是在牙体预备过程完成后,仍然需要医师依据经验对预备体进行评价,判断是否满足使用要求;这种评价方法严重依赖医师的临床经验,医师仅能依赖个人临床经验对已预备的牙齿预备体进行修正;由于未通过量化的指标确定牙齿预备体的误差量值,该评价方法无法对采用牙体预备机器人实现牙齿预备体的修正提供准确、可靠的指导;这大大延长了口腔修复的治疗周期,严重影响了修复效果,同时造成了人力物力的浪费,阻碍了牙体预备机器人在牙体预备手术中的应用;
2、此外,考虑到牙齿预备体形状的复杂性,比较备牙轨迹上备牙点的空间位置差别在形状复杂或者短距离上的形状较大的变化这些情况下是不合适的;并没有一种方法比较理论及实际牙齿预备体形体上的差别,没有实现从降维的角度实现对此类牙齿预备体准确性的高效量化评价,综上,目前牙齿预备体评价技术领域亟待一种能够精确量化评牙齿预备体效果的方法。
技术实现思路
1、针对上述问题,本发明提出了一种基于表面重合度和坡度的牙齿预备体误差评价方法,解决目前牙齿预备体评价技术领域中缺少针对形状复杂或短距离上的形状变化较大的牙齿预备体,以避免对具有特殊属性的一类牙齿预备体评价时出现评价难度过高的情况,实现了对牙齿预备体误差值的量化描述。
2、一种基于表面重合度和坡度的牙齿预备体误差评价方法,所述方法的具体实现过程为:
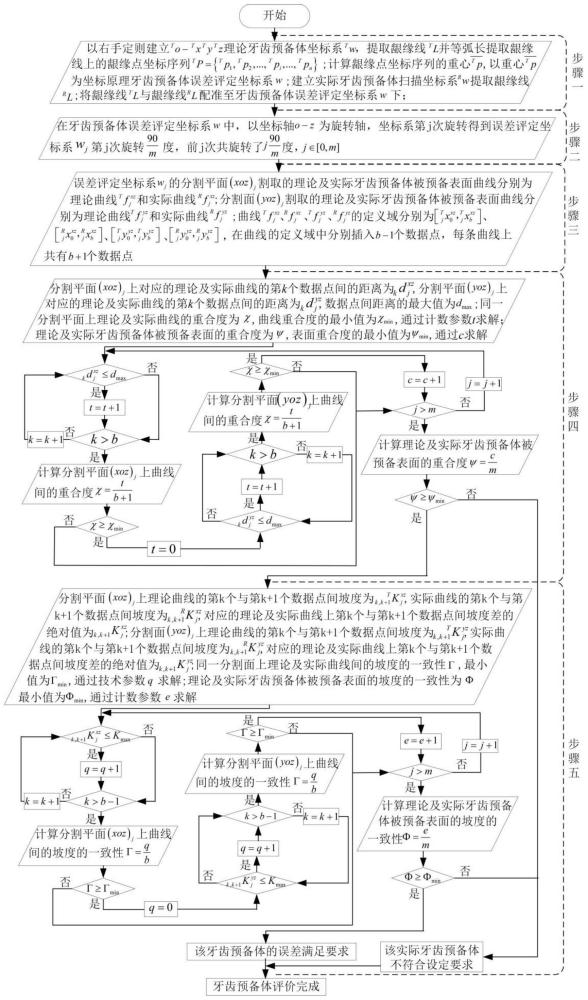
3、步骤一、理论牙齿预备体与实际牙齿预备体配准至牙齿预备体误差评定坐标系:
4、在三维软件中设计得到理论牙齿预备体,以右手定则建立to-txtytz理论牙齿预备体坐标系tw,牙龈与理论牙齿预备体交接处的边界线为龈缘线tl,提取龈缘线tl并等弧长提取在理论牙齿预备体坐标系tw下的龈缘点坐标序列为tp={tp1,tp2,tp3,...,tpi,...,tpn},tpi=(txi,tyi,tzi)为龈缘点坐标序列第i个点在理论牙齿预备体坐标系tw下的坐标值,i的取值范围为1≤i≤n,txi为龈缘点坐标序列第i个点在理论牙齿预备体坐标系tw中的x轴坐标,tyi为龈缘点坐标序列第i个点在理论牙齿预备体坐标系tw中的y轴坐标,tzi为龈缘点坐标序列第i个点在理论牙齿预备体坐标系tw中的z轴坐标;计算龈缘点坐标序列的重心重心在理论牙齿预备体坐标系tw下的坐标为以为坐标原点以右手定则建立o-xyz牙齿预备体误差评定坐标系w;
5、使用口腔扫描仪扫描预备后的实际牙齿预备体,以右手定则建立ro-rxryr实际牙齿预备体扫描坐标系rw,牙龈与实际牙齿预备体交接处的边界线为龈缘线rl,提取龈缘线rl;
6、将龈缘线tl和龈缘线rl进行配准,实现实际牙齿预备体与理论牙齿预备体在牙齿预备体误差评定坐标系w中的配准;
7、步骤二、旋转坐标系的设定:
8、利用牙齿预备体误差评定坐标系w的xoz平面和yoz平面将处于同一坐标系下的理论牙齿预备体被预备表面和实际牙齿预备体被预备表面进行分割,理论牙齿预备体和实际牙齿预备体被xoz平面和yoz平面分割的被预备表面的曲线用来进行理论牙齿预备体和实际牙齿预备体的误差比较;以牙齿预备体误差评定坐标系w的坐标轴o-z轴为旋转轴,每次旋转度,共旋转m次;即,第j次旋转了度,前j次共旋转了度,j∈[0,m],平面yoz共旋转了90°,整个yoz平面覆盖180°角度范围内的理论牙齿预备体和实际牙齿预备体;平面xoz共旋转了90°,整个xoz平面覆盖了180°角度范围内的理论牙齿预备体和实际牙齿预备体,从而实现了旋转的误差评定坐标系对理论牙齿预备体和实际牙齿预备体的整体分割;其中,牙齿预备体误差评定坐标系w第j次旋转后的牙齿预备体误差评定坐标系为wj,第j次旋转后xoz和yoz平面标记为平面(xoz)j和平面(yoz)j;第j次旋转后o-x轴、o-y轴和o-z轴标记为轴(o-x)j、轴(o-y)j和轴(o-z)j;特别的是,当j=0时,w0代表原理论牙齿预备体及实际牙齿预备体误差评定坐标系w;
9、步骤三、理论牙齿预备体及实际牙齿预备体评价数据点的设定:
10、理论牙齿预备体和实际牙齿预备体被牙齿预备体误差评定坐标系wj的(xoz)j平面和(yoz)j平面分割的被预备表面的轮廓曲线用来进行理论牙齿预备体和实际牙齿预备体的误差比较;对于第j次旋转的牙齿预备体误差评定坐标系wj,平面(xoz)j割取的理论牙齿预备体被预备表面的曲线为理论轮廓曲线平面(xoz)j割取的实际牙齿预备体被预备表面的曲线为实际轮廓曲线平面(yoz)j割取的理论牙齿预备体被预备表面的曲线为理论轮廓曲线平面(yoz)j割取的实际牙齿预备体被预备表面的曲线为实际轮廓曲线
11、对于平面(xoz)j割取的理论牙齿预备体被预备表面的曲线为理论轮廓曲线定义理论轮廓曲线的自变量为xj,因变量为zj,定义理论轮廓曲线自变量最小的点的xj坐标值为理论轮廓曲线自变量最大的点的xj坐标值为在xj坐标和xj坐标之间等间距获取b-1个点,引入参数k,k∈[0,b],第0个点的xj坐标值是第b个点的xj坐标值是第k个点的xj坐标值是即定义域为xj坐标对应的zj坐标的坐标值为理论轮廓曲线上的第k个数据点记为理论轮廓曲线上两相邻的数据点和在自变量xj方向上的距离为
12、对于平面(xoz)j割取的实际牙齿预备体被预备表面的曲线为实际轮廓曲线定义实际轮廓曲线的自变量为xj,因变量为zj,定义实际轮廓曲线自变量最小的点的xj坐标值为实际轮廓曲线自变量最大的点的xj坐标值为在xj坐标和xj坐标之间等间距获取b-1个点,引入参数k,k∈[0,b],第0个点的xj坐标值是第b个点的xj坐标值是第k个点的xj坐标值是即定义域为xj坐标对应的zj坐标的坐标值为实际轮廓曲线上的第k个数据点记为实际轮廓曲线上两相邻的数据点和在自变量xj方向上的距离为
13、对于平面(yoz)j割取的理论牙齿预备体被预备表面的曲线为理论轮廓曲线定义理论轮廓曲线的自变量为yj,因变量为zj,定义理论轮廓曲线自变量最小的点的yj坐标值为理论轮廓曲线自变量最大的点的yj坐标值为在yj坐标和yj坐标之间等间距获取b-1个点,引入参数k,k∈[0,b],第0个点的yj坐标值是第b个点的yj坐标值是第k个点的yj坐标值是即定义域为yj坐标对应的zj坐标的坐标值为理论轮廓曲线上的第k个数据点记为理论轮廓曲线上两相邻的数据点和在自变量yj方向上的距离为
14、对于平面(yoz)j割取的实际牙齿预备体被预备表面的曲线为实际轮廓曲线定义实际轮廓曲线的自变量为yj,因变量为zj,定义实际轮廓曲线自变量最小的点的yj坐标值为实际轮廓曲线自变量最大的点的yj坐标值为在yj坐标和yj坐标之间等间距获取b-1个点,引入参数k,k∈[0,b],第0个点的yj坐标值是第b个点的yj坐标值是第k个点的yj坐标值是即定义域为yj坐标对应的zj坐标的坐标值为实际轮廓曲线上的第k个数据点记为实际轮廓曲线上两相邻的数据点和在自变量yj方向上的距离为
15、步骤四、理论牙齿预备体及实际牙齿预备体被预备表面的重合度设定、计算及判断:
16、定义分割面的理论轮廓曲线及实际轮廓曲线上对应的数据点间的距离为d,其具体表示为:对于第j个牙齿预备体误差评定坐标系wj,分割平面(xoz)j上对应的理论轮廓曲线及实际轮廓曲线的第k个数据点间的距离为分割平面(yoz)j上对应的理论轮廓曲线及实际轮廓曲线的第k个数据点间的距离为理论轮廓曲线及实际轮廓曲线上数据点间距离的最大值为dmax,同一分割平面上理论轮廓曲线及实际轮廓曲线的重合度为χ,具体表示为t为理论轮廓曲线及实际轮廓曲线上的数据点间的距离小于等于dmax的个数,χ的最小值为χmin,t的初始值为0;引入计数参数c,参数c的作用是记录平面(xoz)j和平面(yoz)j上的理论轮廓曲线及实际轮廓曲线的重合度均满足预期的坐标系的个数,这是量化理论牙齿预备体及实际牙齿预备体被预备表面重合度的重要指标;定义ψ为理论牙齿预备体及实际牙齿预备体被预备表面的重合度,其具体表示为定义理论牙齿预备体及实际牙齿预备体被预备表面重合度ψ的最小值为ψmin,c的初值为0;
17、判断理论牙齿预备体及实际牙齿预备体被预备表面重合度的思路为:由分割面分割出的曲线上的点到分割面分割出的轮廓曲线再到预备表面,其具体判断过程如下:
18、a)分割面(xoz)j上理论轮廓曲线及实际轮廓曲线数据点间的距离在最大距离范围内的数据点个数的判断:
19、判断是否成立,
20、具体为:
21、若成立,则令t=t+1,跳转至步骤四b);
22、若不成立,则跳转至步骤四b);
23、b)是否判断完分割面(xoz)j上b+1个理论数据点及实际数据点间距离:
24、判断k>b是否成立,
25、具体为:
26、若k>b不成立,说明尚未判断完分割面(xoz)j上b+1个理论数据点及实际数据点间距离,则继续判断理论数据点及实际数据点间距离是否在最大距离范围内,令k=k+1,跳转至步骤四a);
27、若k>b成立,则说明已经判断完分割面(xoz)j上所有理论数据点及实际数据点间距离,跳转至步骤四c);
28、c)计算并判断分割面(xoz)j上理论轮廓曲线及实际轮廓曲线重合度:
29、计算分割面(xoz)j上理论轮廓曲线及实际轮廓曲线重合度判断χ≥χmin是否成立,
30、具体为:
31、若χ≥χmin成立,则t重置为0,跳转至步骤四d);
32、若χ≥χmin不成立,则牙齿预备体误差评价坐标系wj的分割面(xoz)j上的理论轮廓曲线及实际轮廓曲线的重合度不合格,该次分割面轮廓曲线评价结束,跳转到步骤四h);
33、d)分割面(yoz)j上理论轮廓曲线及实际轮廓曲线数据点间的距离在最大距离范围内的数据点个数的判断:
34、判断是否成立,
35、具体为:
36、若成立,则令t=t+1,跳转至步骤四e);
37、若不成立,则跳转至步骤四e);
38、e)是否判断完分割面(yoz)j上b+1个理论数据点及实际数据点间距离:
39、判断k>b是否成立,
40、具体为:
41、若k>b不成立,说明尚未判断完分割面(yoz)j上b+1个理论数据点及实际数据点间距离,则继续判断理论数据点及实际数据点间距离是否在最大距离范围内,令k=k+1,跳转至步骤四d);
42、若k>b成立,则说明已经判断完分割面(yoz)j上所有理论数据点及实际数据点间距离,跳转至步骤四f);
43、f)计算并判断分割面(yoz)j上理论轮廓曲线及实际轮廓曲线的重合度:
44、计算分割面(yoz)j上理论轮廓曲线及实际轮廓曲线的重合度判断χ≥χmin是否成立,
45、具体为:
46、若χ≥χmin成立,则t重置为0,跳转至步骤四g);
47、若χ≥χmin不成立,则牙齿预备体误差评价坐标系wj的分割面(yoz)j上的理论轮廓曲线及实际轮廓曲线的重合度不合格,该次分割面曲线评价结束,跳转到步骤四h);
48、g)牙齿预备体误差评价坐标系wj的平面(xoz)j和平面(yoz)j上的理论轮廓曲线及实际轮廓曲线的重合度均满足预期的个数判断:
49、运行至此步骤,若以上步骤均成立,则c=c+1,跳转到步骤四h);
50、h)是否判断所有牙齿预备体误差评价坐标系wj:
51、判断j>m是否成立,
52、具体为:
53、若j>m不成立,说明尚未判断完m个牙齿预备体误差评价坐标系,则继续判断下一个牙齿预备体误差评价坐标系各分割面上的理论曲线及实际曲线的重合度是否都在期望范围内,令j=j+1,跳转到步骤四a);
54、若j>m成立,则说明已经判断完所有的误差评定坐标系的分割面上理论曲线及实际曲线的重合度,跳转到步骤四i);
55、i)计算并判断理论牙齿预备体及实际牙齿预备体被预备表面的重合度:
56、计算理论牙齿预备体及实际牙齿预备体被预备表面的重合度判断ψ≥ψmin是否成立,
57、具体为:
58、若ψ≥ψmin成立,则跳转至步骤五;
59、若ψ≥ψmin不成立,则理论牙齿预备体被预备表面及实际牙齿预备体被预备表面的重合度不合格,该次牙齿预备体精度评价结束,输出该实际牙齿预备体不符合设定要求;
60、步骤五、理论牙齿预备体及实际牙齿预备体被预备表面坡度的设定、计算及判断:
61、定义分割面的理论轮廓曲线上相邻的两数据点间的坡度为tkk,k+1,分割面的实际轮廓曲线上相邻的两数据点间的坡度为rkk,k+1,分割面上理论轮廓曲线及实际轮廓曲线中对应的相邻两点间的坡度差的绝对值为kk,k+1,具体表示为:对于第j个误差评定坐标系wj,分割平面(xoz)j上理论轮廓曲线的第k个与第k+1个数据点间的坡度为分割平面(xoz)j上实际轮廓曲线的第k个与第k+1个数据点间的坡度为分割平面(xoz)j上对应的理论轮廓曲线及实际轮廓曲线上第k个与第k+1个数据点间的坡度差的绝对值为分割平面(yoz)j上理论轮廓曲线的第k个与第k+1个数据点间的坡度为分割平面(yoz)j上实际轮廓曲线的第k个与第k+1个数据点间的坡度为分割平面(yoz)j上对应的理论轮廓曲线及实际轮廓曲线上第k个与第k+1个数据点间的坡度差的绝对值为设定理论轮廓曲线及实际轮廓曲线上相对应的相邻数据点间坡度差的绝对值的最大值为kmax,同一分割平面上理论轮廓曲线及实际轮廓曲线间的坡度的一致性为γ,具体表示为q为理论轮廓曲线及实际轮廓曲线上相对应的相邻数据点间坡度差的绝对值小于等于kmax的个数,γ的最小值为γmin,q的初始值为0;引入计数参数e,参数e的作用是记录平面(xoz)j和平面(yoz)j上的理论轮廓曲线及实际轮廓曲线上相对应的相邻数据点间坡度差的绝对值均满足预期的坐标系的个数,这是量化理论牙齿预备体及实际牙齿预备体被预备表面坡度的重要指标;定义φ为理论牙齿预备体及实际牙齿预备体被预备表面的坡度的一致性,其具体表示为定义理论牙齿预备体及实际牙齿预备体被预备表面的坡度的一致性φ的最小值为φmin,e的初值为0;
62、判断理论牙齿预备体及实际牙齿预备体被预备表面的坡度的一致性的思路为:由分割面分割出的曲线上的点到分割面分割出的轮廓曲线再到被预备表面,其具体判断过程如下:
63、a)分割面(xoz)j上相对应的相邻数据点间坡度差的绝对值在最大值范围内数据点个数判断:
64、判断是否成立,
65、具体为:
66、若成立,则令q=q+1,跳转至步骤五b);
67、若不成立,则跳转至步骤五b);
68、b)是否判断完分割面(xoz)j上b个理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值:
69、判断k>b-1是否成立,
70、具体为:
71、若k>b-1不成立,说明尚未判断完分割面(xoz)j上b个理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值,则继续判断理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值是否在最大坡度差的绝对值范围内,令k=k+1,跳转至步骤五a);
72、若k>b-1成立,则说明已经判断完分割面(xoz)j上所有理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值,跳转至步骤五c);
73、c)计算并判断分割面(xoz)j上理论轮廓曲线及实际轮廓曲线的坡度的一致性:
74、计算分割面(xoz)j上理论轮廓曲线及实际轮廓曲线间的坡度的一致性判断γ≥γmin是否成立,
75、具体为:
76、若γ≥γmin成立,则q重置为0,跳转至步骤五d);
77、若γ≥γmin不成立,则牙齿预备体误差评价坐标系wj的分割面(xoz)j上的理论轮廓曲线及实际轮廓曲线间的坡度的一致性不合格,该次分割面曲线评价结束,跳转到步骤五h);
78、d)分割面(yoz)j上相对应的相邻数据点间坡度差的绝对值在最大值范围内数据点个数判断:
79、判是否成立,
80、具体为:
81、若成立,则令q=q+1,跳转至步骤四e);
82、若不成立,则跳转至步骤四e);
83、e)是否判断完分割面(yoz)j上b个理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值:
84、判断k>b-1是否成立,
85、具体为:
86、若k>b-1不成立,说明尚未判断完分割面(yoz)j上b个理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值,则继续判断理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值是否在最大坡度差的绝对值范围内,令k=k+1,跳转至步骤五d);
87、若k>b-1成立,则说明已经判断完分割面(yoz)j上所有理论轮廓曲线及实际轮廓曲线对应的两相邻数据点间坡度差的绝对值,跳转至步骤四f);
88、f)计算并判断分割面(yoz)j上理论轮廓曲线及实际轮廓曲线的坡度的一致性:
89、计算分割面(yoz)j上理论轮廓曲线及实际轮廓曲线间的坡度的一致性判断γ≥γmin是否成立,
90、具体为:
91、若γ≥γmin成立,则q重置为0,跳转至步骤五g);
92、若γ≥γmin不成立,则牙齿预备体误差评价坐标系wj的分割面(yoz)j上的理论轮廓曲线及实际轮廓曲线间的坡度的一致性不合格,该次分割面曲线评价结束,跳转到步骤五h);
93、g)牙齿预备体误差评价坐标系wj的平面(xoz)j和平面(yoz)j上的理论轮廓曲线及实际轮廓曲线的坡度偏差均满足预期的个数判断:
94、运行至此步骤,若以上步骤均成立,则e=e+1,跳转到步骤四h);
95、h)是否判断所有误差评价坐标系wj:
96、判断j>m是否成立,
97、具体为:
98、若j>m不成立,说明尚未判断完m个误差评价坐标系,则继续判断下一个误差评价坐标系各分割面上的理论曲线及实际曲线的坡度的一致性是否都在期望范围内,令j=j+1,跳转到步骤五a);
99、若j>m成立,则说明已经判断完所有的误差评定坐标系的分割面上理论轮廓曲线及实际轮廓曲线的坡度的一致性,跳转到步骤五i);
100、i)计算并判断理论牙齿预备体及实际牙齿预备体被预备表面的坡度的一致性:
101、计算理论牙齿预备体及实际牙齿预备体被预备表面的坡度的一致性判断φ≥φmin是否成立,
102、具体为:
103、若φ≥φmin成立,则输出该牙齿预备体的误差满足要求;
104、若φ≥φmin不成立,则理论牙齿预备体被预备表面及实际牙齿预备体被预备表面的坡度的一致性不合格,该次牙齿预备体精度评价结束,输出该实际牙齿预备体不符合设定要求。
105、本发明的有益效果为:
106、1、本发明针对理论牙齿预备体及实际牙齿预备体误差评价,基于三维实体360°遍历分割的思想,理论牙齿预备体和实际牙齿预备体由龈缘线配准至牙齿预备体误差评定坐标系w下进行评价;牙齿预备体误差评定坐标系w绕o-z轴旋转m次,每次旋转坐标系wj拥有两个分割平面(xoz)j和(yoz)j实现对360°范围内已配准理论牙齿预备体及实际牙齿预备体的遍历分割;第j个坐标系wj的两个分割平面(xoz)j和(yoz)j上分别割取了理论牙齿预备体被预备表面的理论轮廓曲线及实际牙齿预备体被预备表面的实际轮廓曲线。将三维模型分割降维为二维模型,降低了牙齿预备体误差评价的难度,能够评价形状复杂的牙齿预备体,提高了牙齿预备体误差评价的精度。
107、2、本发明针对理论牙齿预备体及实际牙齿预备体的误差评价,提出了分割平面上理论轮廓曲线与实际轮廓曲线的数据点间距离的概念,提出了分割面上的理论轮廓曲线和实际轮廓曲线的重合度χ的概念,通过计数参数t计算;提出了理论牙齿预备体被预备表面及实际牙齿预备体被预备表面的重合度ψ的概念,利用计数参数c计算;在评价过程中,若χ、ψ有任何一个参数不符合限制要求,则直接输出评价结束,简化了评价步骤,防止进行后续不必要的流程;本方法实现了由点到线再到面的理论牙齿预备体被预备表面及实际牙齿预备体被预备表面重合度的量化评价,提高了牙齿预备体被量化的程度。
108、3、本发明针对理论牙齿预备体及实际牙齿预备体误差评价,进一步提出了针对评价理论牙齿预备体被预备表面和实际牙齿预备被预备表面的形貌特征的评价概念,即,理论牙齿预备体被预备表面及实际牙齿预备体被预备表面的坡度;提出了分割平面上理论轮廓曲线与实际轮廓曲线的数据点间坡度差的绝对值的概念,提出了分割面上的理论轮廓曲线和实际轮廓曲线间的坡度的一致性γ的概念,通过计数参数q计算;提出了理论牙齿预备体被预备表面及实际牙齿预备体被预备表面的坡度的一致性φ的概念,利用计数参数e计算;在评价过程中,若γ、φ有任何一个参数不符合限制要求,则直接输出评价结束,简化了评价步骤,防止进行后续不必要的流程;该步骤是对理论牙齿预备被预备表面及实际预备体被预备表面形貌特征的进一步评价,有利于提高牙齿预备体评价的准确性;本方法实现了由点到线再到面的理论牙齿预备体被预备表面及实际牙齿预备体被预备表面坡度的量化评价,提高了牙齿预备体被量化的程度。
109、4、同本发明人同日申报的发明专利《一种基于空间等高度平面等角度分割的牙齿预备体评价方法》相比,虽然都是对理论牙齿预备体及实际牙齿预备体的误差进行评价,但是上述专利是评价前牙牙齿预备体精度的方法,并且上述专利沿预备体误差评定坐标系w的z轴方向建立m层测量面并在测量平面内以对三维牙齿预备体等角度降维分割;而本方法是评价后牙牙齿预备体精度的方法,本方法绕牙齿预备体误差评定坐标系w的z轴旋转,建立牙齿预备体误差评定坐标系wj,利用牙齿预备体误差评定坐标系wj的平面(xoz)j和平面(yoz)j,实现对三维牙齿预备体的降维分割,两种方法互为补充,从评价预备体形体尺寸的角度完善了牙齿预备体评价系列方法。
110、5、同本发明人同日申报的发明专利《一种基于表面偏离度和凸出度的牙齿预备体误差评价方法》相比,虽然都是从比较理论牙齿预备体及实际牙齿预备体形体数据模型的角度对预备体的误差进行评价,但是上述专利从比较分割面上理论轮廓曲线及实际轮廓曲线的偏离度和理论轮廓曲线及实际轮廓曲线上相对应相邻数据点间的曲线凸出度差来量化评价预备体的误差;而本方法利用理论轮廓曲线及实际轮廓曲线上相对应的数据间的距离和理论轮廓曲线及实际轮廓曲线上相对应相邻数据点间的坡度差来量化评价预备体的误差,两种方法互为补充,从评价预备体形体尺寸的角度完善了牙齿预备体评价系列方法。
- 还没有人留言评论。精彩留言会获得点赞!