一种时间窗约束下的卡车无人机任务分配方法
本发明属于任务分配,具体涉及一种时间窗约束下的卡车无人机任务分配方法。
背景技术:
1、时间窗约束下卡车无人机协同包裹投递的任务分配问题是物流领域的关键问题之一。随着电子商务的发展,顾客对快速配送的需求不断上升,很大程度上带动了物流行业的创新。然而,传统的纯卡车配送模式可能会受到日益复杂的城市交通和道路拥堵的限制,导致配送速度变慢和顾客满意度降低。随着无人机技术的成熟,无人机可以在城市交通复杂的情况下快速投递包裹,因此大幅缩短配送时间,满足顾客对即时响应的需求。但是,无人机也受到载荷和续航等约束。卡车无人机系统很好地结合了卡车和无人机的优点,提供了更灵活的交付选择,为电子商务创造了更具竞争力的服务,是探索高效配送解决方案的创新性配送模式。此类问题的关键研究内容是旨在考虑顾客时间窗的前提下,如何优化多辆卡车协同多架无人机进行包裹投递的配送路线。其中每辆卡车只运载一架无人机,在卡车送货的同时,无人机也可以为其他顾客提供服务。顾客存在软时间窗口约束,如果卡车无人机在配送过程中违反顾客的时间窗约束,将会产生相应的惩罚成本。目标函数是最大限度地减少卡车和无人机产生的总旅行成本。
2、在现有技术中,一般将任务分配方法分为精确算法和启发式算法。针对时间窗约束、有限载荷与工作时长约束的任务分配问题,经典的精确算法其基本思想是对约束条件下优化问题的所有可行解空间进行搜索,当可行解空间过大时且约束较多时,其搜索效率较低,无法在多项式时间内最优求解np-hard问题;经典的启发式算法有变邻域搜索算法(vns):其中变邻域搜索算法原理简单、局部搜索能力强,能够采用多个不同的邻域进行系统搜索,并在一定时间内获得大规模优化问题的次优解,但是其搜索过程中缺乏一些启发式的指导信息,搜索过于随机。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的时间窗约束下的卡车无人机任务分配方法解决了现有的配送任务分配方法实现过程中搜索效率低、无法获得最优的任务分配结果的问题。
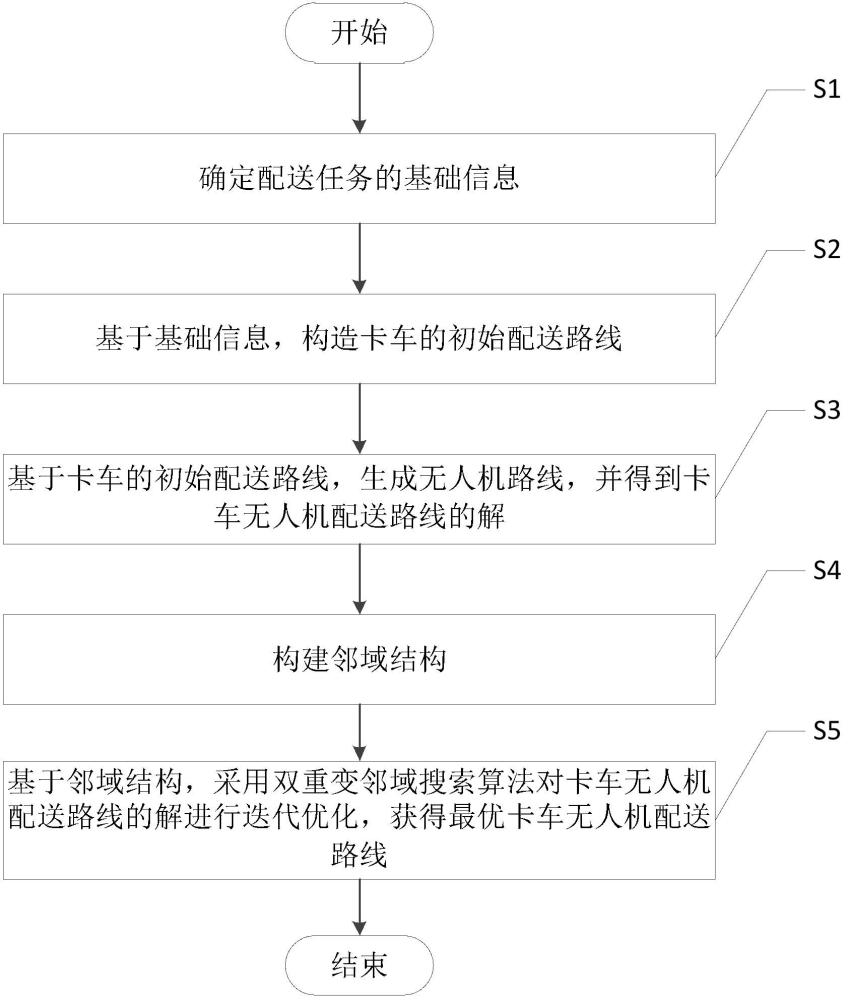
2、为了达到上述发明目的,本发明采用的技术方案为:一种时间窗约束下的卡车无人机任务分配方法,包括以下步骤:
3、s1、确定配送任务的基础信息;
4、s2、基于基础信息,构造卡车的初始配送路线;
5、s3、基于卡车的初始配送路线,生成无人机路线,并得到卡车无人机配送路线的解;
6、s4、构建邻域结构;
7、s5、基于邻域结构,采用双重变邻域搜索算法对卡车无人机配送路线的解进行迭代优化,获得最优卡车无人机配送路线。
8、进一步地,所述步骤s1中的基础信息包括顾客的初始位置对应的距离矩阵,顾客的时间窗对应的时序约束矩阵以及配送任务需要的卡车数量;
9、其中,基于 n个顾客点,确定两两顾客之间欧氏距离的代价矩阵,即为距离矩阵 d;
10、第 i个顾客的时间窗为,根据全部顾客的时间窗得到对应的时序约束矩阵为;表示时序约束矩阵的第行第列的元素,若,则,否则;其中,表示允许顾客 i最早被访问的时间,表示允许顾客 i最晚被访问的时间。
11、进一步地,所述步骤s1中,确定配送任务需要的卡车数量的方法为:
12、s11、计算一辆卡车在任意两个顾客点之间行驶的平均时间;
13、s12、计算顾客被服务的平均时间;
14、s13、根据平均时间和,计算一辆卡车在其最大工作时长内能访问的平均顾客数;
15、s14、根据平均顾客数和顾客数量 n,计算配送任务中需要的卡车数量。
16、进一步地,所述步骤s2具体为:
17、s21、初始化卡车路线,将仓库点0加入到当前已访问点的集合中;
18、同时,将当前已行驶距离最短的卡车记为,且当有多辆已行驶距离相同的卡车时,从中随机抽取一辆卡车记为;
19、s22、根据时序约束矩阵得到由中全零列的索引构成的集合 b,基于集合 b确定待插入的顾客点并将其插入到卡车的当前路线中;
20、s23、基于卡车的当前路线,更新集合、时序矩阵和卡车的路线,并根据所有卡车路线更新;
21、s24、判断当前集合中是否包含了全部的顾客点索引;
22、若是,则进入步骤s25;
23、若否,则返回步骤s22;
24、s25、将当前所有卡车路线作为初始配送路线。
25、进一步地,所述步骤s22中,待插入的顾客点为:
26、
27、式中,表示卡车当前路线上最后一位顾客的索引,表示卡车从顾客点到顾客点的旅行时间;
28、所述步骤s23中,集合、时序矩阵和卡车的路线的更新公式为:
29、
30、式中,表示集合中元素仅为顾客点的集合,表示时序矩阵中第行的全部元素,表示并集。
31、进一步地,所述步骤s3具体为:
32、利用fast-2opt策略对卡车的初始配送路线进行初步优化,再利用 findsortie策略生成无人机路线,进而得到卡车无人机配送路线的初始解,并初始化当前解、全局最优解,且记解的旅行成本为,的旅行成本为。
33、进一步地,所述步骤s4中,构建的邻域结构的邻域操作包括:
34、(1)随机交换点:随机取解向量的上部向量中的两个点,并将该两点的位置进行交换;
35、(2)随机交换整体:随机取整个向量中的两列,并将其位置进行交换;
36、(3)随机插入点:随机取解向量的上部向量中的一个点,并随机插入到上部向量的其他位置;
37、(4)随机插入整体:随机取整个解向量中的一列,并随机插入到整个解向量的其他位置;
38、(5)去除无人机路线:随机取解向量的下部向量中元素值为1的点,将其值改为0;
39、(6)添加无人机路线:随机取解向量的下部向量中元素值为0的点,将其值改为1;
40、(7)随机翻转点:随机取解向量的下部向量中的两个点,然后将下部向量中这两个点之间的序列进行翻转;
41、(8)随机改变值:随机取解向量的下部向量中的一段序列,然后将该段序列的值进行转变;
42、(9)随机交换不同的值:随机取解向量的下部向量中两个元素值不同的点,并进行位置交换;
43、(10)下部向量的随机插入:随机取解向量的下部向量中的一个点,并随机插入到下部向量的其他位置;
44、(11)随机比例交换点:根据卡车数量,将解向量分为相应个局部解向量,然后随机取其中两个局部解向量的上部向量中的两段序列,并满足:
45、
46、(12)随机比例交换整体:根据卡车数量,将解向量分为相应个局部解向量,然后随机取其中两个整个局部解向量中的两段序列,并满足:
47、
48、式中,、分别是两个局部解向量的上部向量的长度,、分别是对应其局部解向量的上部向量中该段序列的长度。
49、进一步地,所述步骤s5具体为:
50、s51、初始化迭代次数 k=1;
51、s52、随机采取一个邻域结构对解进行一次邻域扰动,得到扰动后的解为,并记解的旅行成本为;
52、s53、采用操作对解进行迭代优化得到新的解和对应的旅行成本,并判断是否成立;
53、若是,则将解赋予解,旅行成本赋予,解赋予全局最优解,旅行成本赋予,使 k的值为1,返回步骤s52;
54、若否,则将 k的值增加1,并进入步骤s54;
55、s54、判断是否成立:
56、若是,返回步骤s52;
57、若否,进入步骤s55;
58、s55、再次初始化迭代次数 k=1;
59、s56、将解分解为个局部解向量,每个局部解向量对应各个卡车和其携带的无人机的路线;同时记局部解为取当前解的第个局部解向量,表示第辆卡车和其携带的无人机的路线的解,且为对应的旅行成本;
60、s57、采用操作对局部解进行迭代优化,得到新的局部解,并将局部解取代解中的部分,得到新的整体解,同时更新其旅行成本;
61、s58、判断是否成立;
62、若是,则使 k的值增加1,并返回步骤s57;
63、若否,则将整体解赋予,整体解旅行成本赋予,并进入步骤s59;
64、s59、判断算法运行时长是否达到预设时长;
65、若是,则输出当前全局最优解和对应的旅行成本,停止迭代,得到最优卡车无人机配送路线;
66、若否,则使 k的值为1,并返回步骤s52。
67、进一步地,所述步骤s53中,操作的实现方法具体为:
68、s531、取,记表示利用12个邻域结构中的第个邻域结构对解进行邻域扰动;
69、s532、执行邻域操作得到新的解,并记解的旅行成本为;
70、判断<是否成立;
71、若是,则将解赋予解,同时更新当前局部最优解的旅行成本,使 q=1,并随机打乱当前12个邻域结构的顺序,进入步骤s533;
72、若否,则使 q的值增加1,进入步骤s533;
73、s533、判断是否成立;
74、若是,则返回步骤s532;
75、若否,则将解赋予,将旅行成本的值赋予,完成对解的迭代优化。
76、进一步地,所述步骤s57中,操作的实现方法具体为:
77、s571、取,记表示利用前10个邻域中的第 q个邻域对局部解进行邻域扰动;
78、s572、执行邻域操作得到新的局部解,并记局部解的旅行成本为;
79、判断是否成立;
80、若是,则将局部解赋予局部解,同时更新当前局部最优解的旅行成本,使 q=1,并随机打乱当前前10个邻域结构的顺序;
81、若否,则使 q的值增加1,并进入步骤s573;
82、s573、判断是否成立;
83、若是,则返回步骤s572;
84、若否,则将局部解赋予,完成对局部解的迭代优化。
85、本发明的有益效果为:
86、1)针对物流中顾客的时间窗约束,本发明提出了一种新的卡车初始路线的构建算法,将顾客的时间窗转化为顾客间的时序约束,然后根据时间裕度确定将哪个顾客插入到当前的卡车路线中,确保以较低的违反时间窗的成本生成卡车初始配送路线。
87、2)在本发明方法中,在启发式算法 vns中加入对单辆卡车及其携带的无人机的路线的局部优化策略,并提出了6种新的邻域结构,以确保对解的进一步探索。
88、3)本发明提供的卡车初始配送路线构造算法可以很好地得到高质量且有效的卡车路线的初始解,和迭代优化启发式算法相结合,可以对卡车无人机的初始解有更强的搜索能力,与现有方法相比,相同时间内往往能得到质量更优的解。
- 还没有人留言评论。精彩留言会获得点赞!