一种机场跑道污染物覆盖面积评估方法、系统及智能终端与流程
本发明涉及机场跑道污染物面积评估,具体涉及一种机场跑道污染物覆盖面积评估方法、系统及智能终端。
背景技术:
1、跑道状况评估是机场运营人对某一运行跑道上有水、雪、雪浆、冰、霜时或橡胶沉积,对跑道表面状况进行的评估。评估结果是机组对实际刹车效应直观感受的一个重要组成部分。跑道表面状况的报告将从传统的跑道摩阻特性测试转变为跑道表面状况评估。民航机场司于2021年7月7日发布《运输机场跑道表面状况评估和报告规则》征求意见稿,2021年9月3日印发《运输机场跑道表面状况评估和通报规则的通知》,2021年11月4日正式实施。污染物覆盖面积评估,是跑道状况评估的重要组成部分,规则中详细定义了跑道状态评估的方法、内容、精度及格式,其中输出格式是将跑道划分成左中右三部分,输出每一部分覆盖比例(如:25/36/29)。
2、据民航规〔2012〕32号《关于印发运输机场跑道表面状况评估和通报规则的通知》,目前机场跑道运维人员,评估跑道污染物覆盖面积主要采取目视等方式进行,采用这种方法主要面临以下问题:
3、1、人工成本大,工作效率较低;
4、2、人工主观判断,缺乏客观性,对工作人员专业程度要求较高。
技术实现思路
1、针对现有技术中的缺陷,本发明提供的一种机场跑道污染物覆盖面积评估方法、系统及智能终端,评估过程自动化,评估速度快、效率高、更准确、精度高。
2、第一方面,本发明实施例提供的一种机场跑道污染物覆盖面积评估方法,包括:
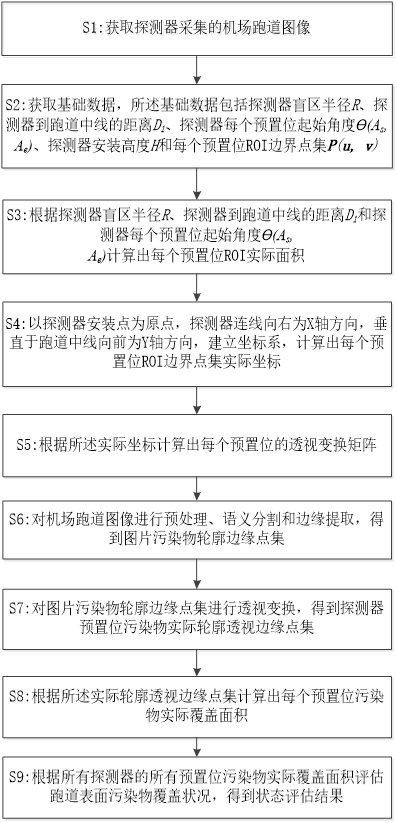
3、获取探测器采集的机场跑道图像;
4、获取基础数据,所述基础数据包括探测器盲区半径r、探测器到跑道中线的距离d1、探测器每个预置位起始角度ɵ(as, ae)、探测器安装高度h和每个预置位roi边界点集p(u,v);
5、根据探测器盲区半径r、探测器到跑道中线的距离d1和探测器每个预置位起始角度ɵ(as, ae)计算出每个预置位roi实际面积;
6、以探测器安装点为原点,探测器连线向右为x轴方向,垂直于跑道中线向前为y轴方向,建立坐标系,计算出每个预置位roi边界点集实际坐标;
7、根据所述实际坐标计算出每个预置位的透视变换矩阵;
8、对机场跑道图像进行预处理、语义分割和边缘提取,得到图片污染物轮廓边缘点集;
9、对图片污染物轮廓边缘点集进行透视变换,得到探测器预置位污染物实际轮廓透视边缘点集;
10、根据所述实际轮廓透视边缘点集计算出每个预置位污染物实际覆盖面积;
11、根据所有探测器的所有预置位污染物实际覆盖面积评估跑道表面污染物覆盖状况,得到状态评估结果。
12、第二方面,本发明实施例提供的一种机场跑道污染物覆盖面积评估系统,包括:图像获取模块、数据获取模块、计算模块和评估模块,
13、所述图像获取模块用于获取探测器采集的机场跑道图像;
14、所述数据获取模块用于获取基础数据,所述基础数据包括探测器盲区半径r、探测器到跑道中线的距离d1、探测器每个预置位起始角度ɵ(as, ae)、探测器安装高度h和每个预置位roi边界点集p(u,v);
15、所述计算模块用于根据探测器盲区半径r、探测器到跑道中线的距离d1和探测器每个预置位起始角度ɵ(as, ae)计算出每个预置位roi实际面积;
16、以探测器安装点为原点,探测器连线向右为x轴方向,垂直于跑道中线向前为y轴方向,建立坐标系,计算出每个预置位roi边界点集实际坐标;
17、根据所述实际坐标计算出每个预置位的透视变换矩阵;
18、对机场跑道图像进行预处理、语义分割和边缘提取,得到图片污染物轮廓边缘点集;
19、对图片污染物轮廓边缘点集进行透视变换,得到探测器预置位污染物实际轮廓透视边缘点集;
20、根据所述实际轮廓透视边缘点集计算出每个预置位污染物实际覆盖面积;
21、所述评估模块用于根据所有探测器的所有预置位污染物实际覆盖面积评估跑道表面污染物覆盖状况,得到状态评估结果。
22、第三方面,本发明实施例提供的一种智能终端,包括处理器、输入设备、输出设备和存储器,所述处理器分别与输入设备、输出设备和存储器连接,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行上述实施例描述的方法。
23、本发明的有益效果:
24、本发明实施例提供的一种机场跑道污染物覆盖面积评估方法、系统及智能终端,通过探测器采集图片,对图像进行污染物分割,提取污染物图片轮廓,利用先验信息计算预置位实际跑道覆盖面积,获取透视变换矩阵,将污染物轮廓边缘进行透视变换获得新轮廓,计算新轮廓实际覆盖面积,从而获取全跑道污染物覆盖面积,进而按规范输出跑道污染物评估状态结果,本发明相比与现有技术相比,具有以下优点:
25、1、评估过程自动化,人工参与度低;
26、2、评估更准确、精度高;
27、3、评估速度快、效率高。
技术特征:
1.一种机场跑道污染物覆盖面积评估方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述根据探测器盲区半径r、探测器到跑道中线的距离d1和探测器每个预置位起始角度ɵ(as, ae)计算出每个预置位图片感兴趣区域实际面积的具体方法包括:
3.如权利要求2所述的方法,其特征在于,所述计算出每个预置位图片感兴趣区域边界点集实际坐标的具体方法包括:
4.如权利要求3所述的方法,其特征在于,根据所述实际坐标计算出每个预置位的透视变换矩阵的具体方法包括:
5.如权利要求4所述的方法,其特征在于,所述对机场跑道图像进行预处理、语义分割和边缘提取的具体方法包括:
6.如权利要求5所述的方法,其特征在于,所述对图片污染物轮廓边缘点集进行透视变换具体方法包括:
7.如权利要求6所述的方法,其特征在于,根据所述实际轮廓透视边缘点集计算出每个预置位污染物实际覆盖面积的具体方法包括:
8.如权利要求7所述的方法,其特征在于,所述根据所有探测器的所有预置位污染物实际覆盖面积评估跑道表面污染物覆盖状况的具体方法包括:
9.一种机场跑道污染物覆盖面积评估系统,其特征在于,包括:图像获取模块、数据获取模块、计算模块和评估模块,
10.一种智能终端,包括处理器、输入设备、输出设备和存储器,所述处理器分别与输入设备、输出设备和存储器连接,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,其特征在于,所述处理器被配置用于调用所述程序指令,执行如权利要求1-8任一项所述的方法。
技术总结
本发明公开了一种机场跑道污染物覆盖面积评估方法、系统及智能终端,涉及机场跑道污染物面积评估领域,方法包括:获取采集的机场跑道图像;获取基础数据;计算出每个预置位ROI实际面积;计算出每个预置位ROI边界点集实际坐标;根据实际坐标计算出每个预置位的透视变换矩阵;对机场跑道图像进行预处理、语义分割和边缘提取,得到图片污染物轮廓边缘点集并对其进行透视变换,得到探测器预置位污染物实际轮廓透视边缘点集;根据实际轮廓透视边缘点集计算出每个预置位污染物实际覆盖面积;根据所有探测器的所有预置位污染物实际覆盖面积评估跑道表面污染物覆盖状况,得到评估结果。评估过程自动化,评估速度快、效率高、更准确。
技术研发人员:周利军,何东林,范若琛,颜善,王鑫然
受保护的技术使用者:中国民用航空总局第二研究所
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!