一种闸机识别方法、装置、终端设备及存储介质
本发明涉及图像识别领域,尤其涉及一种闸机识别方法、装置、终端设备及存储介质。
背景技术:
1、车辆在进出停车场时需要经过闸机,随着自动驾驶汽车的普及,在汽车行驶至闸机前时,需要对闸机进行有效的识别。闸机的开闭状态会影响自动驾驶车辆的轨迹规划及车辆的控制,而且闸机的识别通常发生在停车场等特定的场景中,这些场景可能具有一些特殊的限制和要求。
2、在现有技术中往往依赖专家经验和专业知识,有针对性地对闸机进行特征提前和选择才能实现对闸机关键点的识别。并且在现有技术中通过深度学习的方法仅仅只能对单闸机场景进行识别,然而对于多闸机场景从一系列关键点中仅使用其几何关系获得属于同一闸机的一组关键点的准确性很低,容易造成闸机错检和漏检。
技术实现思路
1、本发明提供了一种闸机识别方法、装置、终端设备及存储介质,以解决现有技术中闸机识别准确性不高的问题。
2、第一方面,本技术提供了一种闸机识别方法,包括:
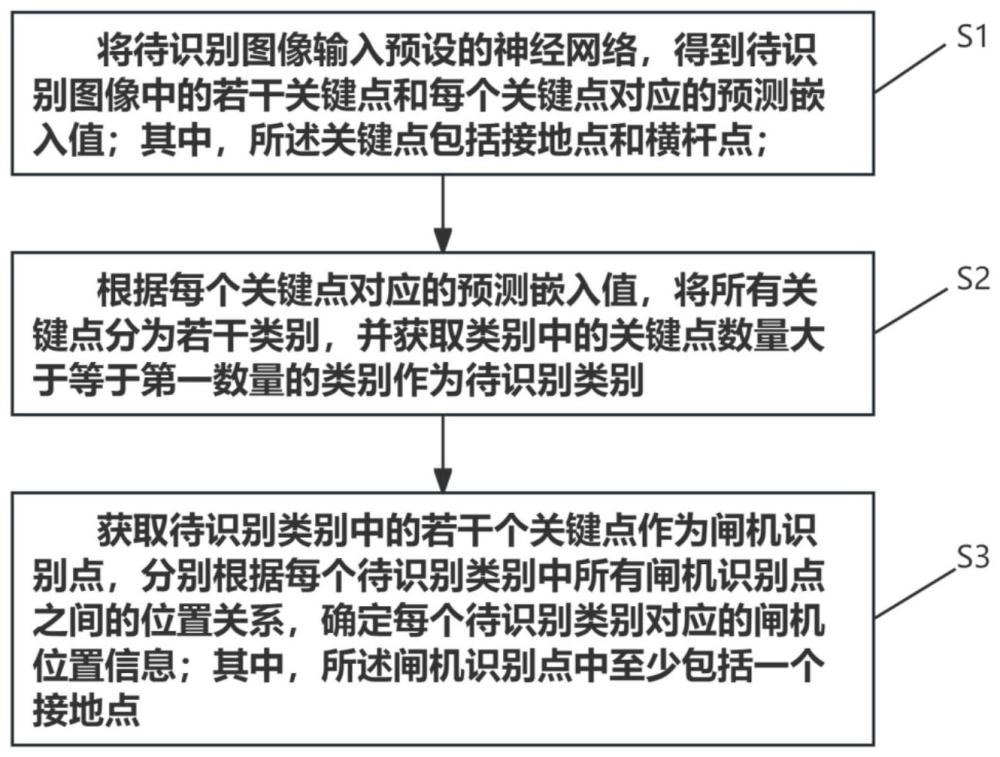
3、将待识别图像输入预设的神经网络,得到待识别图像中的若干关键点和每个关键点对应的预测嵌入值;其中,所述关键点包括接地点和横杆点;
4、根据每个关键点对应的预测嵌入值,将所有关键点分为若干类别,并获取类别中的关键点数量大于等于第一数量的类别作为待识别类别;
5、获取待识别类别中的若干个关键点作为闸机识别点,分别根据每个待识别类别中所有闸机识别点之间的位置关系,确定每个待识别类别对应的闸机位置信息;其中,所述闸机识别点中至少包括一个接地点。
6、这样根据每个关键点对应的预测嵌入值,将所有关键点分为若干类别,并选择类别中关键点数量较多的作为待识别类别。这样可以增加对不同类型的闸机进行识别的能力,提高系统的适应性和泛化能力。通过根据待识别类别中的闸机识别点之间的位置关系,可以确定每个待识别类别对应的闸机位置信息。这对于自动驾驶车辆的轨迹规划和控制非常重要,可以帮助车辆避免与闸机发生碰撞的风险。且根据嵌入值对关键点进行分类,可以准确区分多个闸机,实现在多闸机场景中对闸机的准确识别,从而提高闸机识别的准确性。
7、进一步地,所述将待识别图像输入预设的神经网络,得到待识别图像中的若干关键点和每个关键点对应的预测嵌入值,包括:
8、将所述待识别图像通过神经网络中连续若干次下采样,得到特征图像,并对所述特征图像进行连续若干次上采样获得关键点图像;其中所述关键点图像至少包括3个通道数据;
9、分别根据关键点图像中的第一通道数据和第二通道数据得到待识别图像中的所有横杆点和接地点,并根据关键点图像中的第三通道数据确定每个横杆点和接地点对应的预测嵌入值。
10、这样关键点图像至少包括3个通道数据,其中第一通道和第二通道分别用于提取横杆点和接地点。通过使用多通道信息,可以更好地区分不同类型的关键点,提高关键点的分类和识别能力。
11、进一步地,所述根据每个关键点对应的预测嵌入值,将所有关键点分为若干类别,具体为:
12、遍历所有的关键点,当存在任意若干个关键点之间预测嵌入值的差值在预设区间内时,确定所述若干个关键点为同一个类别。
13、这样通过对关键点之间预测嵌入值的差值进行判断,可以将相似的关键点划分到同一个类别中。这样可以帮助对关键点进行更细粒度的分类,提高关键点的区分度和识别能力。且通过设置预设区间,可以容忍一定范围内的预测嵌入值差值,从而减少噪声或误差对关键点分类的影响。这可以提高关键点分类的鲁棒性和稳定性,减少误判的可能性。
14、进一步地,所述获取类别中的关键点数量大于等于第一数量的类别作为待识别类别,包括:
15、判断各个类别中关键点的数量是否大于等于第一数量;
16、当存在类别中的关键点数量小于第一数量时,删除所述类别;
17、当存在类别中的关键点数量大于等于第一数量时,判断所述类别中是否存在关键点为接地点;
18、当所述类别中存在在关键点为接地点时,确实所述类别为待识别类别;
19、当所述类别中不存在关键点为接地点时,删除所述类别。
20、这样通过判断各个类别中关键点的数量是否大于等于第一数量,可以筛选出关键点数量较多的类别作为待识别类别。这样可以优先考虑关键点数量较多的类别,从而提高系统对多样化场景的适应性和泛化能力。且在待识别类别中,判断是否存在关键点为接地点。如果存在关键点为接地点,则可以确认该类别为待识别类别。这样可以帮助系统准确识别出闸机的接地点,从而进行正确的闸机状态判断和控制。同时当类别中的关键点数量小于第一数量或不存在关键点为接地点时,将该类别删除。这样可以减少误判和干扰,提高系统对关键点的准确性和可靠性。
21、进一步地,在所述将待识别图像输入预设的神经网络,得到待识别图像中的若干关键点和每个关键点对应的预测嵌入值,之后包括:
22、将所有关键点的特征值进行归一化处理,并将所有归一化处理后特征值大于阈值的关键点根据特征值排序获得特征值序列;
23、遍历特征值序列中所有的关键点,并抑制当前遍历到关键点的邻域内其他的关键点,将遍历后的关键点作为新的关键点。
24、这样通过对关键点的特征值进行归一化处理,可以将不同范围的特征值映射到统一的区间内。这样可以消除特征值之间的尺度差异,使得它们具有可比性,有助于后续的排序和处理操作。且在遍历特征值序列时,抑制当前关键点邻域内的其他关键点。这样可以避免关键点之间的冗余信息和重复计算,提高关键点的独立性和独特性。同时通过抑制邻域内其他关键点后,将遍历后的关键点作为新的关键点。这样可以筛选出具有显著特征的关键点,减少冗余信息,提高关键点的准确性和可靠性。
25、进一步地,所述获取待识别类别中的若干个关键点作为闸机识别点,包括:
26、获取待识别类别中特征值最大的接地点作为闸机识别点,并从所述待识别类别中的若干横杆点作为闸机识别点。
27、这样通过选择少量的横杆点作为闸机识别点,可以减少计算的复杂度,提高系统的运行效率。这对于实时应用和资源受限的环境非常重要。且通过筛选出特征值最大的接地点和若干横杆点作为闸机识别点,可以减少冗余信息的干扰。这有助于提高系统对关键点的准确性和可靠性,减少误判的可能性。
28、进一步地,所述分别根据每个待识别类别中所有闸机识别点之间的位置关系,确定每个待识别类别对应的闸机位置信息,包括:
29、判断待识别类别中所有的闸机识别点中是否存在至少两个横杆点;
30、当所述闸机识别点中存在至少两个横杆点时,计算每个作为闸机识别点的横杆点到作为闸机识别点的接地点的距离;
31、确定距离所述接地点距离最远的横杆点为横杆终点,确定距离所述接地点距离最近的横杆点为横杆起点,并根据所述横杆终点、横杆起点和所述接地点确定所述待识别类别对应的闸机位置信息。
32、这样通过判断待识别类别中是否存在至少两个横杆点,可以确定是否存在横杆结构。这有助于判断待识别类别是否为有效的闸机类别,避免误判和错误识别。且当存在至少两个横杆点时,通过计算每个作为闸机识别点的横杆点到接地点的距离,可以确定距离接地点最远的横杆点为横杆终点,距离接地点最近的横杆点为横杆起点。这样可以准确确定闸机的横杆起点和终点,可以进一地确定闸机状态。
33、第二方面,本技术提供了一种闸机识别装置,包括:关键点模块、类别模块和闸机识别模块;
34、所述关键点模块用于将待识别图像输入预设的神经网络,得到待识别图像中的若干关键点和每个关键点对应的预测嵌入值;其中,所述关键点包括接地点和横杆点;
35、所述类别模块用于根据每个关键点对应的预测嵌入值,将所有关键点分为若干类别,并获取类别中的关键点数量大于等于第一数量的类别作为待识别类别;
36、所述闸机识别模块用于获取待识别类别中的若干个关键点作为闸机识别点,分别根据每个待识别类别中所有闸机识别点之间的位置关系,确定每个待识别类别对应的闸机位置信息;其中,所述闸机识别点中至少包括一个接地点。
37、进一步地,所述关键点模块包括:特征单元和嵌入值单元;
38、所述特征单元用于将所述待识别图像通过神经网络中连续若干次下采样,得到特征图像,并对所述特征图像进行连续若干次上采样获得关键点图像;其中所述关键点图像至少包括3个通道数据;
39、所述嵌入值单元用于分别根据关键点图像中的第一通道数据和第二通道数据得到待识别图像中的所有横杆点和接地点,并根据关键点图像中的第三通道数据确定每个横杆点和接地点对应的预测嵌入值。
40、进一步地,所述类别模块包括:差值单元;
41、所述差值单元用于遍历所有的关键点,当存在任意若干个关键点之间预测嵌入值的差值在预设区间内时,确定所述若干个关键点为同一个类别。
42、进一步地,所述类别模块包括:第一判断单元、第二判断单元、删除单元和待识别单元;
43、所述第一判断单元用于判断各个类别中关键点的数量是否大于等于第一数量;
44、所述第二判断单元用于当第一判断单元确定存在类别中的关键点数量大于等于第一数量时,判断所述类别中是否存在关键点为接地点;
45、所述删除单元用于当第一判断单元确定存在类别中的关键点数量小于第一数量时,删除所述类别;
46、所述删除单元用于当第二判断单元确定所述类别中不存在关键点为接地点时,删除所述类别;
47、所述待识别单元用于当第二判断单元确定所述类别中存在在关键点为接地点时,确实所述类别为待识别类别。
48、进一步地,在所述关键点模块之后包括:序列模块和遍历模块;
49、所述序列模块用于将所有关键点的特征值进行归一化处理,并将所有归一化处理后特征值大于阈值的关键点根据特征值排序获得特征值序列;
50、所述遍历模块用于遍历特征值序列中所有的关键点,并抑制当前遍历到关键点的邻域内其他的关键点,将遍历后的关键点作为新的关键点。
51、进一步地,所述闸机识别模块包括:识别点单元;
52、所述识别点单元用于获取待识别类别中特征值最大的接地点作为闸机识别点,并从所述待识别类别中的若干横杆点作为闸机识别点。
53、进一步地,所述闸机识别模块包括:第三判断单元、距离单元和位置单元;
54、所述第三判断单元用于判断待识别类别中所有的闸机识别点中是否存在至少两个横杆点;
55、所述距离单元用于当第三判断单元确定所述闸机识别点中存在至少两个横杆点时,计算每个作为闸机识别点的横杆点到作为闸机识别点的接地点的距离;
56、所述位置单元用于确定距离所述接地点距离最远的横杆点为横杆终点,确定距离所述接地点距离最近的横杆点为横杆起点,并根据所述横杆终点、横杆起点和所述接地点确定所述待识别类别对应的闸机位置信息。
57、相应地,本发明还提供一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上任意一项所述的闸机识别方法。
58、相应地,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上任意一项所述的闸机识别方法。
59、这样根据每个关键点对应的预测嵌入值,将所有关键点分为若干类别,并选择类别中关键点数量较多的作为待识别类别。这样可以增加对不同类型的闸机进行识别的能力,提高系统的适应性和泛化能力。通过根据待识别类别中的闸机识别点之间的位置关系,可以确定每个待识别类别对应的闸机位置信息。这对于自动驾驶车辆的轨迹规划和控制非常重要,可以帮助车辆避免与闸机发生碰撞的风险。且根据嵌入值对关键点进行分类,可以准确区分多个闸机,实现在多闸机场景中对闸机的准确识别,从而提高闸机识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!