一种双摄像头结合的平板电脑增强显示方法与流程
本技术涉及图像增强,具体涉及一种双摄像头结合的平板电脑增强显示方法。
背景技术:
1、随着科学技术的发展,双摄像头在平板电脑中已经普及。双摄像头可以提供更丰富的拍摄功能,例如光学变焦、景深效果以及更好的低光拍摄性能;其次,双摄像头可以提高照片质量和拍摄体验,满足用户对于拍照的不同需求;另外,双摄像头也可以实现一些增强现实(ar)功能和3d效果。
2、通常为了更好的采集夜景图像,平板通常会采用彩色摄像头与黑白摄像头结合的方式获取夜景图像。而由于夜晚光线较少,受到的干扰相较于白天更多,导致获取的图像较为模糊,仍需对其进行增强。而传统的图像增强由于只考虑图像本身像素值而没有考虑夜景中噪声的影响,导致对夜景图像的增强效果较差。
3、综上所述,本实施例提出一种双摄像头结合的平板电脑增强显示方法,通过采集夜景图像的彩色图像及黑白图像,根据彩色图像与黑白图像中像素点的各类特征之间的差别构建夜景图像的噪声突出系数;根据噪声突出系数对灰度世界算法的增益系数进行改进,根据改进后的增益系数结合灰度世界算法对彩色图像与黑白图像的合成图像进行增强,使夜景图像具有更高的清晰度。
技术实现思路
1、为了解决上述技术问题,本发明提供一种双摄像头结合的平板电脑增强显示方法,以解决现有的问题。
2、本发明的一种双摄像头结合的平板电脑增强显示方法采用如下技术方案:
3、本发明一个实施例提供了一种双摄像头结合的平板电脑增强显示方法,该方法包括以下步骤:
4、采集夜景图像的rgb图像及二值图像,分别记为彩色图像及黑白图像;
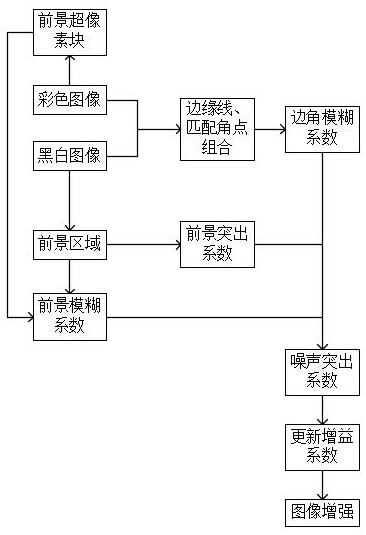
5、获取彩色图像与黑白图像的合成图像;获取黑白图像中各前景区域;根据所有前景区域的像素点数量得到黑白图像的前景突出系数;通过harris角点检测分别获取彩色图像与黑白图像中各角点;根据彩色及黑白图像中角点坐标得到黑白图像中各角点在彩色图像中的匹配角点;将黑白图像中各角点与对应匹配角点组成的集合作为各匹配角点组合;根据各匹配角点组合中角点邻域得到各匹配角点组合的汉明距离;根据各匹配角点组合的汉明距离及彩色与黑白图像中边缘线数量得到夜景图像的边角模糊系数;根据超像素分割算法及彩色图像灰度图中各像素点灰度值得到彩色图像的各前景超像素块;根据各前景超像素块及前景区域的形状上下文描述子得到各前景超像素块的前景模糊系数;根据前景突出系数、边角模糊系数及前景模糊系数得到夜景图像的噪声突出系数;
6、根据噪声突出系数得到灰度世界算法的更新增益系数;通过更新增益系数结合灰度世界算法对合成图像进行增强。
7、优选的,所述获取黑白图像中各前景区域,具体为:获取黑白图像中连通域,将像素值大于0的各连通域作为各前景区域。
8、优选的,所述根据所有前景区域的像素点数量得到黑白图像的前景突出系数,具体包括:
9、获取所有前景区域中像素点总数;将前景区域个数与所述像素点总数的乘积作为黑白图像的前景突出系数。
10、优选的,所述根据彩色及黑白图像中角点坐标得到黑白图像中各角点在彩色图像中的匹配角点,具体为:
11、计算黑白图像中第j个角点与彩色图像中各角点坐标之间的欧氏距离,将所有欧氏距离中最小值对应的彩色图像中的角点作为黑白图像中第j个角点的匹配角点。
12、优选的,所述根据各匹配角点组合中角点邻域得到各匹配角点组合的汉明距离,具体为:
13、通过outs算法获取彩色图像灰度图的二值图,记为彩色图像的二值图;采用局部二值模式分别获取黑白图像、彩色图像各角点邻域的lbp编码;计算黑白图像中角点与彩色图像中匹配角点的所述lbp编码之间的汉明距离;将所述汉明距离作为各匹配角点组合的汉明距离。
14、优选的,所述根据各匹配角点组合的汉明距离及彩色与黑白图像中边缘线数量得到夜景图像的边角模糊系数,具体包括:
15、计算所有匹配角点组合的汉明距离的平均值;计算彩色图像灰度图与黑白图像之间的边缘线数量差值绝对值;计算彩色图像与黑白图像之间的角点数量差值绝对值;计算所述边缘线数量差值绝对值与所述角点数量差值绝对值的乘积;计算所述平均值与所述乘积的比值;将所述比值作为夜景图像的边角模糊系数。
16、优选的,所述根据超像素分割算法及彩色图像灰度图中各像素点灰度值得到彩色图像的各前景超像素块,具体为:
17、通过超像素分割算法获取彩色图像的各超像素块;在彩色图像灰度图中,获取超像素块中所有像素点的灰度值均值大于预设阈值的各超像素块,作为彩色图像的各前景超像素块。
18、优选的,所述根据各前景超像素块及前景区域的形状上下文描述子得到各前景超像素块的前景模糊系数,具体包括:
19、获取各前景超像素块及各前景区域的质心;获取各前景超像素块与每个前景区域的质心坐标之间的欧氏距离;将各前景超像素块的欧氏距离最小值对应的前景区域作为各前景超像素块的最近前景区域;将各前景超像素块中所有像素点的灰度值均值作为各前景超像素块的灰度值;计算各前景超像素块与对应的最近前景区域的形状上下文描述子之间的欧氏距离;
20、计算各前景超像素块与对应最近前景区域的质心坐标之间的欧氏距离与所述形状上下文描述子之间的欧氏距离的乘积;计算各前景超像素块的灰度值与预设阈值之间的差值;计算所述乘积与所述差值的比值;将所述比值作为各前景超像素块的前景模糊系数。
21、优选的,所述根据前景突出系数、边角模糊系数及前景模糊系数得到夜景图像的噪声突出系数,具体包括:
22、计算所有前景超像素块的前景模糊系数的均值;计算所述均值与边角模糊系数的乘积;计算所述乘积与前景突出系数的比值;将所述比值作为夜景图像的噪声突出系数。
23、优选的,所述根据噪声突出系数得到灰度世界算法的更新增益系数,具体包括:
24、将噪声突出系数与灰度世界算法原本的增益系数的乘积作为灰度世界算法的更新增益系数。
25、本发明至少具有如下有益效果:
26、本发明分别获取彩色摄像头图像以及黑白摄像头的图像,并结合夜景的特征对彩色图像和黑白图像在夜景中的特征进行分析,考虑在夜景中噪声的影响,获取夜景噪声突出系数,根据夜景噪声突出系数对增益系数进行更新,避免了由于只考虑图像本身像素值而没有考虑夜景中噪声的影响从而导致对夜景图像的增强效果较差的问题,提高了夜景图像的清晰程度;
27、本发明通过采集夜景图像的彩色图像及黑白图像,根据黑白图像中各前景区域得到黑白图像的前景突出系数;根据彩色图像与黑白图像中角点之间的距离得到各匹配角点组合;根据各匹配角点组合中角点邻域的lbp值之间的差异结合彩色图像与黑白图像中边缘线差异得到夜景图像的边角模糊系数;根据彩色图像中各超像素块与黑白图像中各前景区域形状上下文描述子得到各前景超像素块的前景模糊系数;结合前景突出系数、边角模糊系数对灰度世界算法的增益系数进行调整得到更新增益系数;根据更新增益系数结合灰度世界算法对夜景图像进行增强,具有较高的图像增强效果。
- 还没有人留言评论。精彩留言会获得点赞!