焊缝识别方法、焊接方法、装置及电子设备与流程
本发明涉及数据处理领域,具体而言,涉及一种焊缝识别方法、焊接方法、装置及电子设备。
背景技术:
1、焊接是制造业各个领域的材料加工的重要环节,对产品的质量有着重要影响。随着半自动化、自动化和智能化的发展,以及生产需求的不断提高,焊接已经从手动焊接发展为半自动焊接和全自动化焊接,焊接效率得到大幅度提升,焊接成本也大大降低。
2、提高焊缝识别的准确性是提升自动化焊接精度的必要条件。目前,在全自动化焊接技术中,通常采用基于点云平面交线的方法或基于点云配准的方法来识别焊缝。然而,基于点云配准的方法需要预先得到点云模型,点云模型与实际工件的误差较大,导致识别的焊缝精度低。基于点云平面交线的方法对点云相机的要求较高,一般的点云相机在拍摄钢结构等多平面工件时,会引入较大的误差,导致识别的焊缝精度较低。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种焊缝识别方法、焊接方法、装置及电子设备,能够减少工件焊缝识别的误差,提高识别出的焊缝的精度。
2、为了实现上述目的,本发明实施例采用的技术方案如下:
3、第一方面,本发明实施例提供一种焊缝识别方法,所述方法包括:
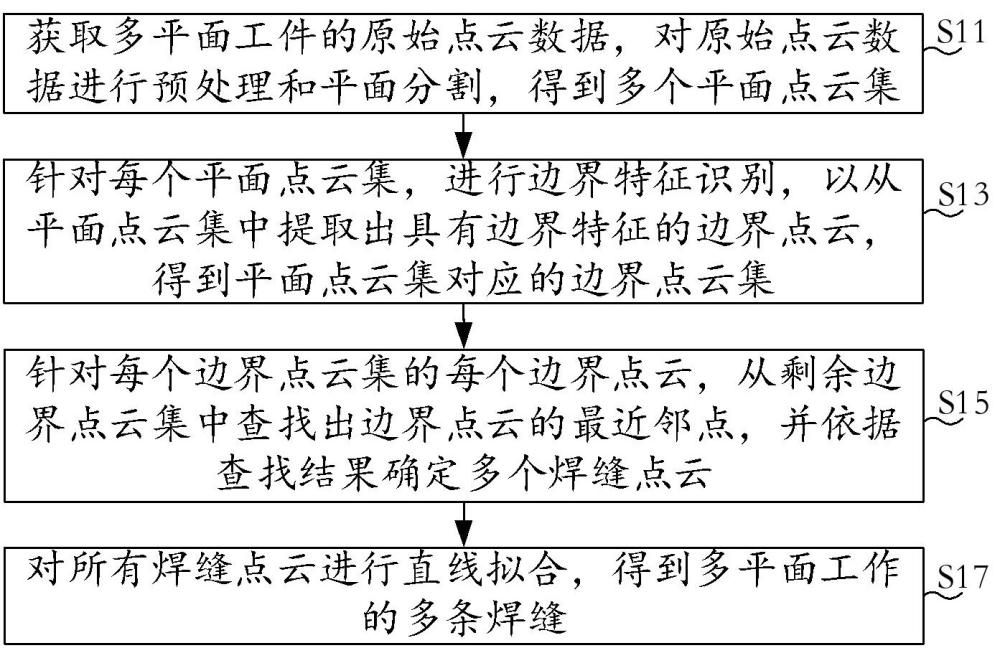
4、获取多平面工件的原始点云数据,对所述原始点云数据进行预处理和平面分割,得到多个平面点云集;其中,每个所述平面点云集包括多个点云数据;
5、针对每个所述平面点云集,进行边界特征识别,以从所述平面点云集中提取出具有边界特征的边界点云,得到所述平面点云集对应的边界点云集;
6、针对每个所述边界点云集的每个边界点云,从剩余边界点云集中查找出所述边界点云的最近邻点,并依据所述最近邻点确定多个焊缝点云;
7、对所有所述焊缝点云进行直线拟合,得到所述多平面工作的多条焊缝。
8、可选地,所述进行边界特征识别,以从所述平面点云集中提取出具有边界特征的边界点云的步骤,包括:
9、计算出所述平面点云集中的每个点云数据的二维坐标,根据所述点云数据的二维坐标,建立所述平面点云集的最小包围盒;
10、将所述最小包围盒划分为多个网格,并依据网格中点云数据的有无,将所述多个网格划分为实孔网格和空孔网格;
11、从所有所述实孔网格中,提取满足边界特征的实孔网格作为边界网格,并将所述边界网格中的点云作为边界点云。
12、可选地,所述从所有所述实孔网格中,提取满足边界特征的实孔网格作为边界网格的步骤,包括:
13、从所有所述网格中,确定每个所述实孔网格的所有相邻网格;
14、针对每个所述实孔网格,从所述实孔网格的所有相邻网格中识别出空孔网格数,判断所述空孔网格数是否大于预设的边界特征阈值;
15、若否,则判定所述实孔网格满足边界特征,并将所述实孔网格作为边界网格。
16、可选地,所述将所述最小包围盒划分为多个网格的步骤,包括:
17、基于所述最小包围盒所在的二维坐标系,获取所述最小包围盒的端点坐标值;其中,所述端点坐标值包括横坐标最大值、横坐标最小值、纵坐标最大值、纵坐标最小值;
18、基于所述端点坐标值,采用网格均匀算法,计算出单个网格的边长和各坐标轴上的网格数;
19、依据所述边长和所述网格数,将所述最小包围盒划分为多个网格。
20、可选地,所述从剩余边界点云集中查找出所述边界点云的最近邻点,并依据所述最近邻点确定多个焊缝点云的步骤,包括:
21、分别从剩余的每个边界点云集中,查找出所述边界点云的一个最近邻点,得到所述边界点云的多个最近邻组;其中,每个所述最近邻组包括边界点云及所述边界点云的一个最近邻点;
22、针对每个所述最近邻组,对所述最近邻组中两个点云的三维坐标取平均值,得到平均坐标,将所述平均坐标对应的点作为一个焊缝点云。
23、可选地,所述对所述原始点云数据进行预处理和平面分割,得到多个平面点云集的步骤,包括:
24、对所述原始点云数据进行去离散点、滤波和降采样,得到预处理点云集;
25、采用ransac算法,对所述预处理点云集进行平面分割,得到多个平面点云集。
26、可选地,所述采用ransac算法,对所述预处理点云集进行平面分割,得到多个平面点云集的步骤,包括:
27、以平面模型作为分割对象,以所述预处理点云集作为分割点云集;
28、基于所述分割点云集,拟合出一个平面模型;
29、计算所述分割点云集中的每个点云到所述平面模型的第二距离,将所述第二距离小于第二阈值的点云作为所述平面模型的面内点,以得到一个由面内点构成的平面点云集;
30、将所述平面点云集从所述分割点云集中剔除,得到剩余点云数据,判断所述剩余点云数据的数量是否小于预设的结束阈值;
31、若是,则结束迭代;
32、若否,则将所述剩余点云数据作为分割点云集,返回执行所述基于所述分割点云集,拟合出一个平面模型的步骤。
33、可选地,所述基于所述分割点云集,拟合出一个平面模型的步骤,包括:
34、从所述分割点云集中随机选取目标数量的点云,以该随机选取的点云拟合出平面估计模型;
35、计算所述分割点云集中的每个点云到所述平面估计模型的第一距离,并将所述第一距离小于第一阈值的点云作为所述平面估计模型的局内点;
36、判断所述局内点的数量是否大于预设的平面点云阈值;
37、若是,则将所述平面估计模型作为一个平面模型;
38、若否,则返回所述从所述分割点云集中随机选取目标数量的点云,以该随机选取的点云拟合出平面估计模型的步骤,直至局内点的数量大于预设的平面点云阈值,或平面估计的迭代次数达到迭代阈值;
39、当平面估计的迭代次数达到迭代阈值时,将局内点数量最大的平面估计模型作为一个平面模型。
40、可选地,所述对所有所述焊缝点云进行直线拟合,得到所述多平面工作的多条焊缝的步骤,包括:
41、对所有所述焊缝点云,采用ransac算法进行直线拟合,得到所述平面点云集对应的焊缝。
42、第二方面,本发明实施例提供一种焊接方法,所述方法包括:
43、获取多平面工件的原始点云数据,对所述原始点云数据进行预处理和平面分割,得到多个平面点云集;其中,每个所述平面点云集包括多个点云数据;
44、针对每个所述平面点云集,进行边界特征识别,以从所述平面点云集中提取出具有边界特征的边界点云,得到所述平面点云集对应的边界点云集;
45、针对每个所述边界点云集的每个边界点云,从剩余边界点云集中查找出所述边界点云的最近邻点,并依据所述最近邻点确定多个焊缝点云;
46、对所有所述焊缝点云进行直线拟合,得到所述多平面工作的多条焊缝;
47、依据所述焊缝,对所述多平面工件进行焊接。
48、第三方面,本发明实施例提供一种焊缝识别装置,包括处理分割模块、焊缝点云提取模块和焊缝拟合模块;
49、所述处理分割模块,用于获取多平面工件的原始点云数据,对所述原始点云数据进行预处理和平面分割,得到多个平面点云集;其中,每个所述平面点云集包括多个点云数据;
50、所述焊缝点云提取模块,用于针对每个所述边界点云集的每个边界点云,从剩余边界点云集中查找出所述边界点云的最近邻点,并依据所述最近邻点确定多个焊缝点云;
51、所述焊缝拟合模块,用于对所有所述焊缝点云进行直线拟合,得到所述多平面工作的多条焊缝。
52、第四方面,本发明实施例提供一种焊接装置,包括处理分割模块、边界点提取模块、焊缝点获取模块、焊缝拟合模块和焊接模块;
53、所述处理分割模块,用于获取多平面工件的原始点云数据,对所述原始点云数据进行预处理和平面分割,得到多个平面点云集;其中,每个所述平面点云集包括多个点云数据;
54、所述边界点提取模块,用于针对每个所述平面点云集,进行边界特征识别,以从所述平面点云集中提取出具有边界特征的边界点云,得到所述平面点云集对应的边界点云集;
55、所述焊缝点获取模块,用于针对每个所述边界点云集的每个边界点云,从剩余边界点云集中查找出所述边界点云的最近邻点,并依据所述最近邻点确定多个焊缝点云;
56、所述焊缝拟合模块,用于对所有所述焊缝点云进行直线拟合,得到所述多平面工作的多条焊缝;
57、所述焊接模块,用于依据所述焊缝,对所述多平面工件进行焊接。
58、第五方面,本发明实施例提供一种电子设备,包括处理器和存储器,该存储器用于存储计算机程序;当该计算机程序被该处理器执行时,实现如第一方面中任一种可选的实施方式所述的焊缝识别方法,或者实现如第二方面所述的焊接方法。
59、第六方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面中任一项可选的实施方式所述的焊缝识别方法,或者是第二方面所述的焊接方法。
60、本发明实施例提供的焊缝识别方法、焊接方法、装置及电子设备,方法包括:对多平面工件的原始点云数据进行预处理和平面分割,得到多个平面点云集;对每个平面点云集进行边界特征识别,以从平面点云集中提取出具有边界特征的边界点云,得到平面点云集的边界点云集;对边界点云集的每个边界点云,从剩余边界点云集中查找出该边界点云的最近邻点,并依据最近邻点确定多个焊缝点云;对所有焊缝点云进行直线拟合,得到多平面工件的多条焊缝。如此,在平面分割得到平面点云集后,引入对每个平面点云集的边界检测,即将焊缝识别转化为平面边界检测,进而基于各边界点云集得到焊缝点云,以及从所有焊缝点云中拟合出多条焊缝,排除掉平面点云集中非边界点云对焊缝点云识别的干扰和影响,从而在一定程度上克服因点云平面大而引入的误差,大大提升了焊缝识别的精度。
61、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!