一种一维显式水动力模型弯道校正算法
本申请属于一维显式水动力模拟,具体地说,涉及一种一维显式水动力模型弯道校正算法。
背景技术:
1、一维水动力模型常用于河道水动力过程模拟,可模拟复杂流态的动力过程,常用的解法包括显式和隐式两类。
2、河道水动力模拟通常采用一维隐式算法,因为一维显式算法通常用于顺直河道模拟,尤其是基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型,在此框架下,一维网格可能不能有效体现弯道部分两个相邻网格之间的相对位置关系,在处理弯道部分通量计算时可能不能有效计算弯道部分的影响。
技术实现思路
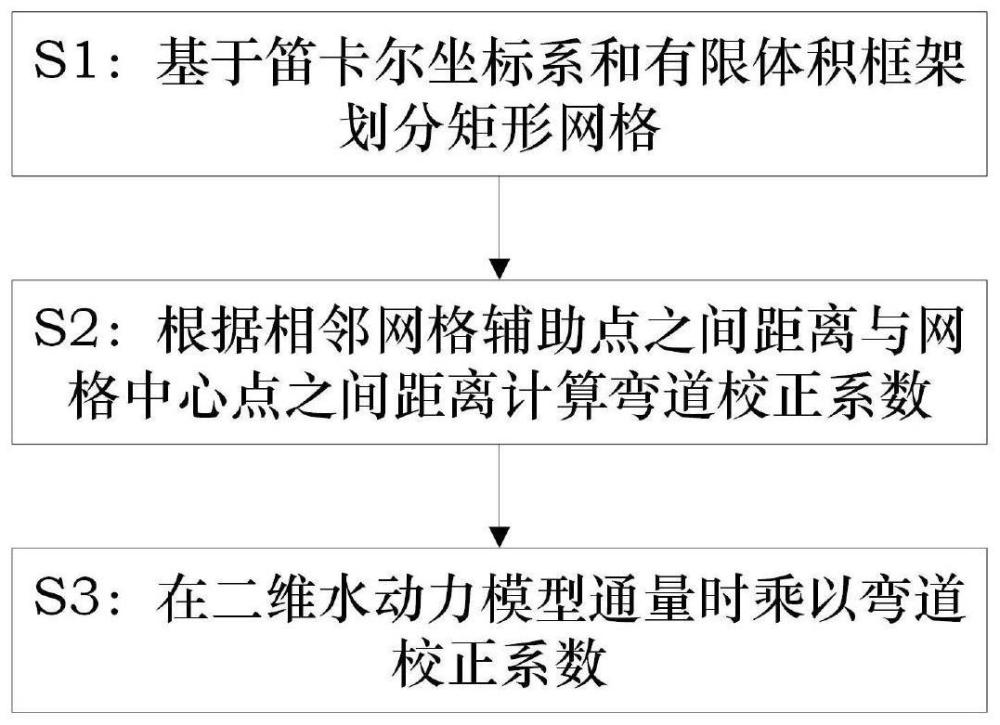
1、为解决上述问题和技术缺陷,本申请实施例采用如下的技术方案,一种一维显式水动力模型弯道校正算法,包括以下步骤:
2、步骤一、针对一维显式水动力模型,沿河道划分网格;
3、步骤二、在各网格中设定辅助点,并将相邻网格的两辅助点连接;
4、步骤三、将各网格中心点相连,设定所述步骤二中辅助点连线和网格中心点连线的夹角为θ;
5、步骤四、设定弯道校正系数;
6、步骤五、计算通量。
7、优选地,所述步骤一中的一维显式水动力模型是基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型。
8、进一步地,所述步骤一中的网格为矩形网格。
9、进一步地,所述步骤四中的弯道校正系数为对应的两个辅助点之间距离与相邻网格中心点之间距离的比值。
10、更进一步地,网格边长x的计算控制方程如下:
11、
12、
13、其中t为时间;u为速度;g为重力加速度;zb为床底高程;h为水深;η为水位高程(η=h+zb);为底坡斜率;τb为底坡摩阻力;ρ为水的密度。
14、更进一步地,所述水位高程η的计算公式为η=h+zb。
15、更进一步地,所述步骤五中计算通量时,需要乘以弯道校正系数。
16、进一步地,所述计算通量的具体公式如下:
17、
18、其中,k+1代表下一个时间步长,i和j为网格的网格单元序号,δt为时间步长;δx为网格边长;c为弯道校正系数。
19、相比于现有技术,本申请实施例的有益效果为:
20、(1)本发明针对基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型,沿河道划分矩形网格;找到每个网格中心点与深泓线上距离最近的点设为辅助点,相邻网格两个辅助点连线,与相邻网格中心点连线的夹角设为θ,对应的两个辅助点之间距离与相邻网格中心点之间距离的比值为弯道校正系数;在计算通量时乘以弯道校正系数;本发明考虑了基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型在处理弯道时的难点问题,提出了弯道校正参数,降低了传统方法中通量计算的误差,计算过程简单、好操作、易推广。
技术特征:
1.一种一维显式水动力模型弯道校正算法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种一维显式水动力模型弯道校正算法,其特征在于,所述步骤一中的一维显式水动力模型是基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型。
3.根据权利要求2所述的一种一维显式水动力模型弯道校正算法,其特征在于,所述步骤一中的网格为矩形网格。
4.根据权利要求1所述的一种一维显式水动力模型弯道校正算法,其特征在于,所述步骤四中的弯道校正系数为对应的两个辅助点之间距离与相邻网格中心点之间距离的比值。
5.根据权利要求3所述的一种一维显式水动力模型弯道校正算法,其特征在于,网格边长x,控制方程如下:
6.根据权利要求5所述的一种一维显式水动力模型弯道校正算法,其特征在于,所述水位高程η的计算公式为η=h+zb。
7.根据权利要求6所述的一种一维显式水动力模型弯道校正算法,其特征在于,所述步骤五中计算通量时,需要乘以弯道校正系数。
8.根据权利要求7所述的一种一维显式水动力模型弯道校正算法,其特征在于,所述计算通量的具体公式如下:
技术总结
本申请实施例公开了一种一维显式水动力模型弯道校正算法,属于一维显式水动力模拟技术领域,包括以下步骤:针对一维显式水动力模型,沿河道划分网格;在各网格中设定辅助点,并将相邻网格的两辅助点连接;将各网格中心点相连,设定步骤二中辅助点连线和网格中心点连线的夹角为θ;计算弯道校正系数;计算通量;本发明针对基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型,沿河道划分矩形网格;找到每个网格中心点与深泓线上距离最近的点设为辅助点;本发明考虑了基于笛卡尔坐标系统有限体积框架下的一维显式水动力模型在处理弯道时的难点问题,提出了弯道校正参数,降低了传统方法中通量计算的误差,计算过程简单、好操作、易推广。
技术研发人员:王月玲
受保护的技术使用者:中国科学院地理科学与资源研究所
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!