基于多算法耦合的船舶航迹缺失数据补全方法及系统
本发明涉及船舶航迹数据,尤其涉及一种基于多算法耦合的船舶航迹缺失数据补全方法、系统、终端及计算机可读存储介质。
背景技术:
1、当前,船舶自动定位系统(automatic identification system,ais)被广泛用于追踪和识别船只,在ais中,船舶位置的更新频率在10分钟以内,但由于设备故障、通信干扰、人为操作等原因,ais数据可能丢失或错误,导致部分海域船舶历史定位数据稀疏且不连贯,此时需要在时间间隔大或者距离远的船舶轨迹点之间进行数据补全,以便更好地了解和分析实际的船舶移动轨迹。
2、目前ais轨迹数据补全的主要方法包括自动补全方法与人工干预方法,前者主要包括基于航行信息插值的轨迹数据补全方法和结合数值插值的轨迹数据补全方法,这两种方法在处理轨迹数据时,往往基于一个重要的假设:船舶的轨迹点之间不横跨陆地。这一假设虽然简化了数据处理过程,但在实际应用中却具有明显的局限性,无法有效还原船舶绕行陆地情景下的实际航行情况,导致在这类区域的轨迹追踪出现明显的异常和失真,从而影响轨迹数据的真实性和可用性。
3、与自动补全方法相比,人工干预方法则尝试通过结合人工设定的航道网格进行路径规划,以此来修正和补全涉及陆地区域的船舶轨迹数据。这种方法在一定程度上能够考虑到船舶绕行陆地的实际航行情况,从而提高数据补全的准确性。然而,人工干预方法不仅耗费大量时间和人力成本,在实际操作中因不考虑原始航行数据中蕴含的航行规律和模式,难以保证补全轨迹的准确性和可靠性。
4、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明的主要目的在于提供一种基于多算法耦合的船舶航迹缺失数据补全方法、系统、终端及计算机可读存储介质,旨在解决现有技术对涉及陆地区域的船舶轨迹数据进行补全的效率低、准确性差,导致补全后的船舶轨迹异常和失真的问题。
2、为实现上述目的,本发明提供一种基于多算法耦合的船舶航迹缺失数据补全方法,所述基于多算法耦合的船舶航迹缺失数据补全方法包括如下步骤:
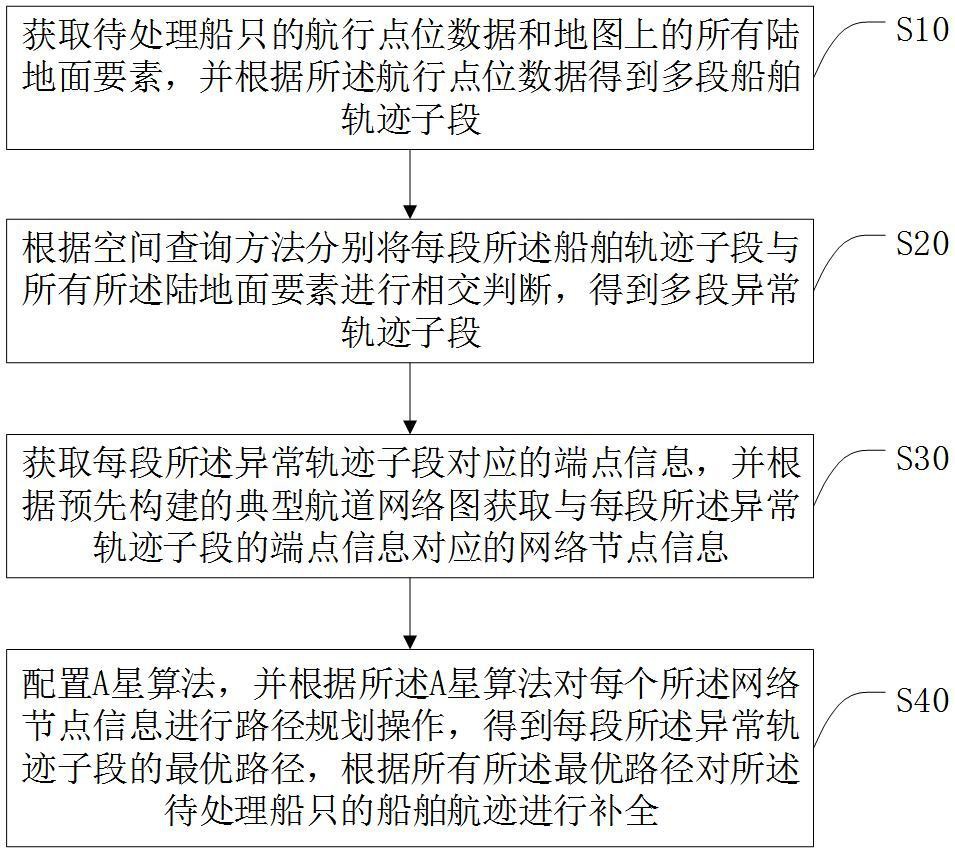
3、获取待处理船只的航行点位数据和地图上的所有陆地面要素,并根据所述航行点位数据得到多段船舶轨迹子段;
4、根据空间查询方法分别将每段所述船舶轨迹子段与所有所述陆地面要素进行相交判断,得到多段异常轨迹子段;
5、获取每段所述异常轨迹子段对应的端点信息,并根据预先构建的典型航道网络图获取与每段所述异常轨迹子段的端点信息对应的网络节点信息;
6、配置a星算法,并根据所述a星算法对每个所述网络节点信息进行路径规划操作,得到每段所述异常轨迹子段的最优路径,根据所有所述最优路径对所述待处理船只的船舶航迹进行补全。
7、可选地,所述的基于多算法耦合的船舶航迹缺失数据补全方法,其中,所述获取待处理船只的航行点位数据和地图上的所有陆地面要素,并根据所述航行点位数据得到多段船舶轨迹子段,具体包括:
8、从预设船舶轨迹数据库中获取所述待处理船只的航行点位数据,并从所述地图上获取所有陆地面要素;
9、获取所述航行点位数据的所有航行点位,并获取每个所述航行点位对应的时间戳;
10、根据所有所述时间戳对所有所述航行点位进行排序,并将相邻时间戳的两个航行点位进行连接,以得到多段船舶轨迹子段。
11、可选地,所述的基于多算法耦合的船舶航迹缺失数据补全方法,其中,所述根据空间查询方法分别将每段所述船舶轨迹子段与所有所述陆地面要素进行相交判断,得到多段异常轨迹子段,具体包括:
12、根据所述空间查询方法分别将每段所述船舶轨迹子段与所有所述陆地面要素进行线面相交的空间查询,判断是否存在船舶轨迹子段与陆地面要素相交;
13、若所述船舶轨迹子段与所述陆地面要素相交,则将对应的船舶轨迹子段进行异常标记处理;
14、当所有所述船舶轨迹子段处理完成后,将所有带有异常标记的船舶轨迹子段作为异常轨迹子段。
15、可选地,所述的基于多算法耦合的船舶航迹缺失数据补全方法,其中,所述获取每段所述异常轨迹子段对应的端点信息,并根据预先构建的典型航道网络图获取与每段所述异常轨迹子段的端点信息对应的网络节点信息,具体包括:
16、获取每段所述异常轨迹子段对应的端点信息,其中,所述端点信息包括开始端点和结束端点;
17、根据预先构建的典型航道网络图分别对每段所述异常轨迹子段的开始端点和结束端点进行匹配操作,得到与每段所述异常轨迹子段的开始端点距离最短的开始网络节点,以及与每段所述异常轨迹子段的结束端点距离最短的结束网络节点;
18、将每段所述异常轨迹子段对应的开始网络节点和结束网络节点进行整合,得到每段所述异常轨迹子段对应的网络节点信息。
19、可选地,所述的基于多算法耦合的船舶航迹缺失数据补全方法,其中,所述配置a星算法,并根据所述a星算法对每个所述网络节点信息进行路径规划操作,得到每段所述异常轨迹子段的最优路径,具体包括:
20、将欧氏距离作为a星算法的代价函数,将曼哈顿距离作为a星算法的启发函数,以完成对所述a星算法的配置;
21、获取与每段所述异常轨迹子段的开始网络节点直接相连的多个第一相连节点,分别计算每段所述异常轨迹子段的开始网络节点和每个第一相连节点之间的第一欧氏距离,计算结束网络节点和每个第一相连节点之间的第一曼哈顿距离;
22、根据每个所述第一相连节点对应的第一欧氏距离和第一曼哈顿距离计算每个所述第一相连节点对应的第一总成本,根据所有所述第一总成本获取每段所述异常轨迹子段的第一目标点;
23、获取与每段所述异常轨迹子段的第一目标点直接相连的多个第二相连节点,……,直至到达结束网络节点,完成对每段所述异常轨迹子段的路径规划操作,得到每段所述异常轨迹子段的最优路径。
24、可选地,所述的基于多算法耦合的船舶航迹缺失数据补全方法,其中,所述根据所有所述最优路径对所述待处理船只的船舶航迹进行补全,具体包括:
25、将每段所述异常轨迹子段的开始端点与对应的最优路径的开始网络节点进行连接;
26、将每段所述异常轨迹子段的结束端点与对应的最优路径的结束网络节点进行连接;
27、当所有所述异常轨迹子段的开始端点和结束端点分别与对应的最优路径连接完成后,表示完成对所述待处理船只的船舶轨迹的补全。
28、可选地,所述的基于多算法耦合的船舶航迹缺失数据补全方法,其中,所述典型航道网络图的构建过程,具体包括:
29、从预设船舶轨迹数据库中获取所有船只的航行点位数据,并对所有所述航行点位数据进行数据清洗操作,得到初始航行点集;
30、对所述初始航行点集进行空间聚类去噪操作,得到与所述初始航行点集对应的高密度航行点集;
31、根据聚类算法将所述高密度航行点集划分为预设数量的簇类,并获取每个簇类的中心点位置信息;
32、根据所有所述中心点位置信息进行三角剖分操作,得到三角网络图;
33、将所述三角网络图中的所有线要素与所有所述陆地面要素进行相交判断,将与所有所述陆地面要素不相交的线要素作为最终线要素,并根据所有所述最终线要素构建典型航道网络图。
34、此外,为实现上述目的,本发明还提供一种基于多算法耦合的船舶航迹缺失数据补全系统,其中,所述基于多算法耦合的船舶航迹缺失数据补全系统包括:
35、轨迹子段获取模块,用于获取待处理船只的航行点位数据和地图上的所有陆地面要素,并根据所述航行点位数据得到多段船舶轨迹子段;
36、异常轨迹判断模块,用于根据空间查询方法分别将每段所述船舶轨迹子段与所有所述陆地面要素进行相交判断,得到多段异常轨迹子段;
37、节点信息获取模块,用于获取每段所述异常轨迹子段对应的端点信息,并根据预先构建的典型航道网络图获取与每段所述异常轨迹子段的端点信息对应的网络节点信息;
38、船舶轨迹补全模块,用于配置a星算法,并根据所述a星算法对每个所述网络节点信息进行路径规划操作,得到每段所述异常轨迹子段的最优路径,根据所有所述最优路径对所述待处理船只的船舶航迹进行补全。
39、此外,为实现上述目的,本发明还提供一种终端,其中,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于多算法耦合的船舶航迹缺失数据补全程序,所述基于多算法耦合的船舶航迹缺失数据补全程序被所述处理器执行时实现如上所述的基于多算法耦合的船舶航迹缺失数据补全方法的步骤。
40、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有基于多算法耦合的船舶航迹缺失数据补全程序,所述基于多算法耦合的船舶航迹缺失数据补全程序被处理器执行时实现如上所述的基于多算法耦合的船舶航迹缺失数据补全方法的步骤。
41、本发明中,获取待处理船只的航行点位数据和地图上的所有陆地面要素,并根据所述航行点位数据得到多段船舶轨迹子段;根据空间查询方法分别将每段所述船舶轨迹子段与所有所述陆地面要素进行相交判断,得到多段异常轨迹子段;获取每段所述异常轨迹子段对应的端点信息,并根据预先构建的典型航道网络图获取与每段所述异常轨迹子段的端点信息对应的网络节点信息;配置a星算法,并根据所述a星算法对每个所述网络节点信息进行路径规划操作,得到每段所述异常轨迹子段的最优路径,根据所有所述最优路径对所述待处理船只的船舶航迹进行补全。本发明通过a星算法实现启发式搜索和最佳优先搜索,可以快速高效地找到最优路径,提高了对大数据量的船舶轨迹进行缺失数据补全的处理效率,并且通过构建典型航道网络图,能够为数据补全提供更准确的支持,避免因需要人工设置航道而耗费大量的时间和精力,进一步提高了数据补全的效率,也提高了数据补全的准确性。
- 还没有人留言评论。精彩留言会获得点赞!